












Государственное бюджетное образовательное учреждение
среднего профессионального образования (ССУЗ)
«Челябинский колледж информационно-промышленных технология и художественных промыслов»
КУРСОВОЙ ПРОЕКТ
Тема проекта: «Определение параметров типового закона регулирования САР температуры воздуха в теплице»
По МДК 04.01 Теоретические основы разработки и моделирования несложных систем автоматизации с учетом специфики технологических процессов Специальность 220703 Автоматизация технологических процессов и производств (по отраслям)
КП. 220703. 317.12.04 ПЗ
|
Руководитель: |
Разработал: |
||
|
Манапова О.Н. Ф.И.О. |
Студент группы А-317 |
||
|
Оценка, подпись |
Грушин Е.В. |
||
|
2015 г. |
|
||
СОДЕРЖАНИЕ
Введение. 3
1. Теоретическая часть. 5
1.1 Обзор существующих САР температуры. Принцип работы манометрического термометра. 5
1.2 Описание САР температуры воздуха в теплице и ее функциональная схема 8
2.Практическая часть. 16
2.1 Моделирование исходного варианта САР. 16
2.2 Расчет параметров типового закона регулирования. 20
2.3 Компьютерное моделирование скорректированной САР. 21
2.4 Оценка качества скорректированной САР ,значения параметров дополнительных блоков структурной схемы.. 22
2.5 Определение показателей удовлетворяющих заданным требованиям. 23
Заключение. 25
Список используемой литературы.. 26
ВведениеПод автоматизацией обычно понимается комплекс мероприятий, направленных на внедрение на предприятиях современных технологий и оборудования, которые в значительной степени снижают ручной труд, увеличивают производительность линий. Преимущества автоматизации перед ручным трудом в современных условиях производства очевидны. Это, прежде всего увеличение объемов производства, снижение издержек, экономия материалов, повышение качества упаковки, а значит, и сохранение качества продукта, увеличение срока его хранения.
На современном уровне развития автоматизация процессов представляет собой один из подходов к управлению процессами. Этот подход позволяет осуществлять управление операциями, данными, информацией и ресурсами за счет использования автоматических систем управления и регулирования (САУ, САР), которые сокращают степень участия человека в процессе, либо полностью его исключают.
Основной целью автоматизации является повышение качества исполнения процесса. Автоматизированный процесс обладает более стабильными характеристиками, чем процесс, выполняемый в ручном режиме. Во многих случаях автоматизация процессов позволяет повысить производительность, сократить время выполнения процесса, снизить стоимость, увеличить точность и стабильность выполняемых операций.
На сегодняшний день автоматизация процессов охватила многие отрасли промышленности и сферы деятельности: от производственных процессов, до совершения покупок в магазинах. Вне зависимости от размера и сферы деятельности организации, практически в каждой компании существуют автоматизированные процессы.
Задачами автоматизации являются устранение или минимизация «человеческого фактора» при выполнении функций системой или прибором, а так же достижение заданных показателей качества при реализации
автоматизируемых функций.
Актуальность применения программных средств для проектирования САР заключается в том, что они позволяют строить и исследовать более сложные и полные модели, по сравнению с моделями, получаемыми традиционными аналитическими инженерными методами.
Целью курсового проекта является исследование системы автоматического регулирования температуры воздуха в теплице с целью получения требуемых показателей качества и получение практических навыков по анализу режимов работы САР.
Цель определила задачи, которые состоят в:
- составлении и описании функциональной и структурной схемы САР температуры воздуха в теплице
- моделировании исходного варианта САР и САР с ПИД-законом регулирования;
-
выявлении
основных задач конструкторской подготовки в организации производства
расчете затрат на разработку конструкторской документации
-
систематизации
мероприятий по технике безопасности;
проектирование в графическом редакторе КОМПАС функциональные и структурные
схемы САР
|
1.1 Обзор
существующих САР температуры. Принцип работы манометрического термометра
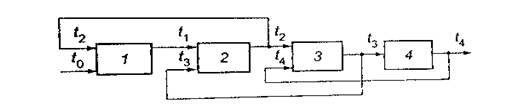
Температура является показателем термодинамического состояния объекта и используется как выходная координата при автоматизации тепловых процессов. Характеристики объектов в системах регулирования температуры зависят от физических параметров процесса и конструкции аппарата. Поэтому общие рекомендации по выбору АСР температуры сформулировать невозможно и требуется тщательный анализ характеристик каждого конкретного процесса. Регулирование температуры в инженерных системах производится значительно чаще, чем регулирование каких-либо других параметров. Диапазон регулируемых температур невелик. Нижний предел этого диапазона ограничен минимальным значением температуры наружного воздуха (-40оС), верхний – максимальной температурой теплоносителя (+150оС). К общим особенностям АСР температуры можно отнести значительную инерционность тепловых процессов и измерителей (датчиков) температуры. Поэтому одной из основных задач при создании АСР температуры является уменьшение инерционности датчиков. Рассмотрим в качестве примера характеристики наиболее распространенного в инженерных системах манометрического термометра в защитном чехле (рис. 1.1). Структурную схему такого термометра можно представить в виде последовательного соединения четырех тепловых емкостей (рис. 1.2): защитного чехла 1, воздушной прослойки 2, стенки термометра 3 и рабочей жидкости 4. Если пренебречь тепловым сопротивлением каждого слоя, то уравнение теплового баланса для каждого элемента этого прибора можно записать в виде
где Gi – масса соответственно чехла, воздушной прослойки, стенки и жидкости; Сpi – удельная теплоемкость; ti – температура; αi1,αi2 – коэффициенты теплоотдачи; Si1,Si2 – поверхности теплоотдачи.
Рисунок 1.1 Принципиальная схема манометрического термометра: 1 – защитный чехол; 2 – воздушная прослойка; 3 – стенка термометра; 4 – рабочая жидкость
Рисунок 1.2 Структурная схема манометрического термометра Как видно из уравнения (1), основными направлениями уменьшения инерционности датчиков температуры являются: - повышение коэффициентов теплоотдачи от среды к чехлу в результате правильного выбора места установки датчика; при этом скорость движения среды должна быть максимальной при прочих равных условиях более предпочтительна установке термометров в жидкой фазе (по сравнению с газообразной) в конденсирующемся паре (по сравнению с конденсатором) и т.п.; - уменьшение теплового сопротивления и тепловой емкости защитного чехла в результате выбора его материала и толщины - уменьшение постоянной времени воздушной прослойки за счет применения наполнителей (жидкости, металлической стружки); у термопар рабочий спай припаивается к корпусу защитного чехла; - выбор типа первичного преобразователя: например при выборе необходимо учитывать, что наименьшей инерционностью обладает термопара в малоинерционном исполнении, наибольшей – манометрический термометр. Каждая АСР температуры в инженерных системах создается для конкретной цели (регулирования температуры воздуха в помещениях (тепло или холодоносителя) и, следовательно, предназначена для работы в общем небольшом диапазоне. В связи с этим условия применения той или иной АСР определяют устройство и конструкцию как датчика, так и регулятора температуры. Например, при автоматизации инженерных систем широко применяются регуляторы температуры прямого действия с манометрическими измерительными устройствами. В схемах автоматизации инженерных систем используются также биметаллические и дилатометрические терморегуляторы, в частности электрический двухпозиционный и пневматический пропорциональный. Электрический
биметаллический датчик предназначен в основном для двухпозиционного
регулирования температуры в помещениях. Чувствительным элементом этого
прибора является биметаллическая спираль, один конец которой закреплен
неподвижно, а другой свободен и удовлетворяет подвижным контактам,
замыкающимся или размыкающимся с неподвижным контактом в зависимости от
текущего и заданного значений температуры. Заданную температуру устанавливают
поворотом шкалы настройки. В зависимости от диапазона настройки
терморегуляторы выпускаются в 16 модификациях с общим диапазоном настройки от
– 30 до +35 0С, причем каждый регулятор имеет диапазон 10, 20 и 30
0С . Погрешность срабатывания Пневматический биметаллический регулятор в качестве преобразователя-усилителя имеет сопло-заслонку, на которую действует усилие биметаллического измерительного элемента. Эти регуляторы выпускаются 8 модификаций, прямого и обратного действия с общим диапазоном настройки от +5 до +30 0С. Диапазон настройки каждой модификации 10 0С . Дилатометрические регуляторы устроены на использовании разности коэффициентов линейного расширения инварного (железоникелевый сплав) стержня и латунной или стальной трубки. Эти терморегуляторы по принципу действия регулирующих устройств не отличаются от подобных регуляторов, использующих манометрическую измерительную систему. 1.2 Описание САР температуры воздуха в теплице и ее функциональная схемаНа рис. 1.3 показана схема САР температуры воздуха θв в теплице. Обогрев теплицы обеспечивается нагретой водой, проходящей через трубу 1, температура которой θт зависит от соотношения горячей и подогретой воды. Это соотношение, в свою очередь, зависит от величины проходного сечения электроуправляемого клапана 2, которое однозначно определяется величиной линейного перемещения Х заслонки клапана.
Рисунок 1.3 Схема САР температуры воздуха в теплице Температура воздуха θв
в теплице измеряется терморезистором Rд,
включенным в мостовую схему 3, которая обеспечивается с помощью резистора R0
задание требуемого значения температуры в атмосфере теплицы. Посредствам
мостовой схемы также сравнивается напряжение U,
пропорциональное температуре θв, с задающим напряжением U0,
то есть мостовая схема, одновременно выполняет функции задающего и
воспринимающего органов (элементов). Сигнал разбаланса мостовой схемы (сигнал
рассогласования) В качестве объекта регулирования в данной системе целесообразно рассматривать помещение теплицы совместно с нагревательными трубами. В таком случае регулирующим воздействием на входе объекта будет температура воды θт, посредствам изменения которой обеспечивается компенсация отклонений температуры воздуха θвв теплице, возникающих в следствии изменения внешних возмущающих воздействий (изменение температуры и влажности атмосферного воздуха, солнечной радиации, скорости и направления ветра и др.). При исследовании САР в качестве главного возмущения следует рассматривать изменения температуры атмосферного воздуха, приняв условно, что все остальные возмущающие факторы постоянны. Динамика САР описывается следующей системой уравнений Объект регулирования:
где Т2- постоянная времени Т2=1440с; Т1 – постоянная времени Т1=2880с;
Датчик температуры:
kд- коэффициент
передачи Резистор R0:
Электронный усилитель:
kу – коэффициент передачи kу=90 Электроуправляемый клапан:
Смеситель горячей и холодной воды:
Физическая сущность переменных, входящих в уравнение, отражена выше, в описании схемы САР. Параметры уравнения Т1, Т2, и k0, k, kд,kу,kэ,kс–соответственно постоянные времени и коэффициенты передачи; -временное запоздание, зависящее от скорости воды (производительности циркуляционного насоса) и конструктивных размеров системы обогрева.
Рисунок 1.4 Резистор как задающее устройство: Uo – выходная величина Температура воздуха θвв теплице измеряется терморезистором Rд, включенным в мостовую схему 3, которая обеспечивается с помощью резистора R0 задание требуемого значения температуры в атмосфере теплицы.
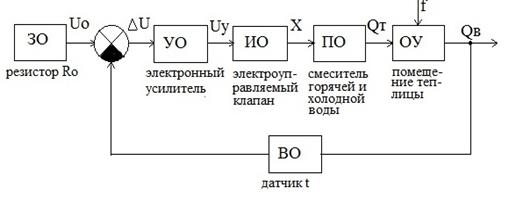
U0 DU U Рисунок 1.5 Функциональная схема сравнивающего органа Объединяя элементарные функциональные схемы (рис. 1.4 …1.10) в соответствии с принципиальной схемой (рис. 1.3), функциональная схема САР примет вид, показанный на рис. 1.11. Посредствам мостовой схемы также сравнивается напряжение U, пропорциональное температуре θв, с задающим напряжением U0, то есть мостовая схема, одновременно выполняет функции задающего и воспринимающего органов (элементов).
 
Рисунок 1.6 Функциональная схема усилителя Сигнал разбаланса мостовой схемы
(сигнал рассогласования)
   Х Х
Рисунок 1.7 Электроуправляемый клапан как исполнительный орган За счет соответствующего изменения перемещения Х заслонки клапана и обеспечивается изменение температуры воды θт.

Рисунок 1.8 Смеситель горячей и холодной воды как преобразующий орган

Рисунок 1.9 Помещение теплицы совместно с нагревательными
трубами как объект регулирования: В качестве объекта регулирования в данной системе целесообразно рассматривать помещение теплицы совместно с нагревательными трубами. В таком случае регулирующим воздействием на входе объекта будет температура воды θт, посредствам изменения которой обеспечивается компенсация отклонений температуры воздуха θвв теплице, возникающих в следствии изменения внешних возмущающих воздействий (изменение температуры и влажности атмосферного воздуха, солнечной радиации, скорости и направления ветра и др.). При исследовании САР в качестве главного возмущения следует рассматривать изменения температуры атмосферного воздуха, приняв условно, что все остальные возмущающие факторы постоянны.
Рисунок 1.10 Функциональная схема элемента, входящего в канал обратной связи Посредствам мостовой схемы также сравнивается напряжение U, пропорциональное температуре θв, с задающим напряжением U0, то есть мостовая схема, одновременно выполняет функции задающего и воспринимающего органов (элементов). 1.3 Передаточные функции объекта регулирования элементов САР и структурная схема системы Объект регулирования имеет две входных величины и одну выходную. Следовательно, он будет иметь передаточные функции по каждому каналу: по регулирующему Wp(p) и по возмущающему воздействию Wв(p). Передаточную функцию объекта регулирующему воздействию Wp(p), руководствуясь принципом суперпозиции, определим на основе уравнения (12) при f=0:
Рисунок 1.11 Функциональная схема САР: ОУ-объект регулирования; ИО-исполнительный орган; УО - усилительный орган ВО-воспринимающий орган; ПО - преобразующий орган; ЗО-задающий орган
преобразовав его по Лампасу как
где
Из
последнего выражения (в левой части) вынесем за скобки
и на его основе определим
Аналогично найдем передаточную функцию
объекта регулирования по возмущающему воздействию
где
С учетом передаточных функций (11, 12), структурную схему объекта регулирования можно представить в виде, показанном на рис.1.12.
Рисунок 1.12 Структурная схема объекта регулирования Передаточные функции остальных элементов САР, определенные аналогично на основе уравнения (3)-(7), имеют следующий вид: · исполнительного органа: W(p)=kэ (13) · усилительного органа: W(p)=kу (14) · воспринимающего органа: W(p)=kд (15) · преобразующего органа: W(p)=kс (16) На основе функциональной схемы САР (рис.1.11) и найденных передаточных функций, путем замены объекта регулирования в этой схеме его структурной схемой (рис.1.12) и замещением функциональных обозначений элементов соответствующими функциями (13, 14, 15, 16), составим структурную схему системы (рис. 1.13). Структурная схема САР (рис.1.13) является математической моделью, на основе которой выполняется компьютерное моделирование системы в среде ПК «МВТУ». 2.Практическая частьWB(p)
 f WУО(p) WИО(p) WПО(p) WР(p)

     
 Uy
X Uy
X
Рисунок 1.13 Структурная схема САР 2.1 Моделирование исходного варианта САР |
 (1)
(1)
 1
0С на средней отметке и до
1
0С на средней отметке и до 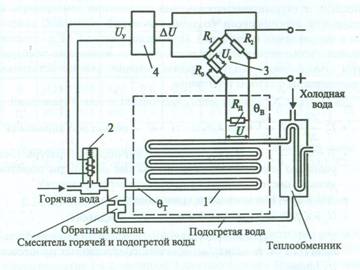
 усиливается
электронным усилителем 4, выходное напряжение Uу
которого управляет электромагнитным клапаном 2. За счет соответствующего
изменения перемещения Х заслонки клапана и обеспечивается изменение
температуры воды θт.
усиливается
электронным усилителем 4, выходное напряжение Uу
которого управляет электромагнитным клапаном 2. За счет соответствующего
изменения перемещения Х заслонки клапана и обеспечивается изменение
температуры воды θт. (2)
(2) –
температура воздуха θв=25±1 0С;
–
температура воздуха θв=25±1 0С; -
коэффициент передачи
-
коэффициент передачи  =0,6;
=0,6; -
коэффициент передачи
-
коэффициент передачи  =0,72.
=0,72. (3)
(3) =0,02В/0С.
=0,02В/0С. (4)
(4) - задающее
напряжение
- задающее
напряжение у = kуDU;
(5)
у = kуDU;
(5) (6)
(6) - коэффициент
передачи
- коэффициент
передачи  =2мм/В
=2мм/В (7)
(7) – коэффициент
передачи
– коэффициент
передачи 
 U0
U0



 -
регулирующее воздействие,
-
регулирующее воздействие,  -
регулируемая величина,
-
регулируемая величина,  -
возмущающее воздействие
-
возмущающее воздействие U
U
 (8)
(8) (9)
(9) и
и -
соответственно изображения по Лапласу регулируемой величины
-
соответственно изображения по Лапласу регулируемой величины  и
регулирующего воздействия
и
регулирующего воздействия .
. (10)
(10) (11)
(11) ;
; ,
приняв
,
приняв  :
: (12)
(12) ;
; ;
; ;
; ;
; -изображение
по Лапласу возмущающего воздействия f.
-изображение
по Лапласу возмущающего воздействия f.


 f
f











Моделирование САР выполним в среде программного комплекса «Моделирование в технических устройствах (ПК «МВТУ»), в котором используется метод структурного моделирования, базирующийся на математических моделях САР в виде их структурных схем. Поэтому, в первую очередь, на основе структурной схемы исходной системы (рис.3.1) составляем структурную схему моделирования (рис.4), заменяя звенья САР соответствующими блоками из общетехнической библиотеки ПК «МВТУ».
Для формирования задающего воздействия U0 воспользуемся блоком «Константа», а для создания возмущающего воздействия I используем блок «Ступенчатое воздействие».
Таблица 2.1
Значения параметров элементов САР
|
Вари-ант |
Т1, с |
Т2, с |
τ,с |
k 0 |
k д, В/0С |
k у |
kэ, мм/В |
k с 0С/мм |
k |
ƒ,0С |
|
4 |
3120 |
1560 |
400 |
0,6 |
0,02 |
60 |
2 |
0,8 |
0,72 |
-14 |
Руководствуясь методикой подготовки исходных данных, выберем метод и зададим параметры интегрирования:
· метод интегрирования «Рунге-Кутта классический 45»;
· исходя из наибольшей постоянной времени Т0 = 3120 с, принимаем первоначальное время интегрирования 312000 с;
· исходя из наименьшей постоянной времени Т2 = 1560 с, принимаем первоначальное значения шага интегрирования: максимального 156 с, минимального 15,6 с;
· интервал выдачи данных 0,014 с;
· точность интегрирования 0,001.

Рисунок 2.2 Структурная схема моделирования САР температуры в печи «МВТУ»
С учетом числовых значений параметров переходных функций САР параметры блоков структурной схемы моделирования будут иметь значения, приведенные в таблице 2.1. Первоначальное значение задающего воздействия U0 примем 1, а возмущения I - 0, необходимое значение U0 определим путем его подбора в процессе моделирования системы.
Таблица 2.2
Значения параметров блоков структурной схемы
|
Блок |
Параметр |
Значение |
|
1 |
Значение сигнала |
25 |
|
2 |
Весовые множители для каждого из выходов |
+1 -1 |
|
3 |
Коэффициент усиления |
18 |
|
4 |
Коэффициент усиления |
0,003 |
|
5 |
Коэффициент усиления |
10 |
|
Постоянная времени |
170 |
|
|
Вектор начальных условий |
0 |
|
|
6 |
Коэффициент усиления |
0,02 |
|
Постоянная времени |
11 |
|
|
Вектор начальных условий |
0 |
|
|
7 |
Коэффициент усиления |
0,3 |
|
Постоянная времени |
170 |
|
|
Вектор начальных условий |
0 |
|
|
8 |
Весовые множители для каждого из входов |
+1 +1 |
|
9 |
Время,YO,YK |
-20 |
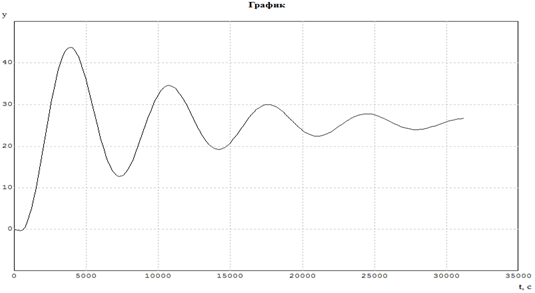
В результате моделирования САР, в соответствии с данными таблицы 2.1, получены графики переходных процессов при различных значениях коэффициента усиления k1 (рис.2.1, 2.2), анализ которых показывает следующее:
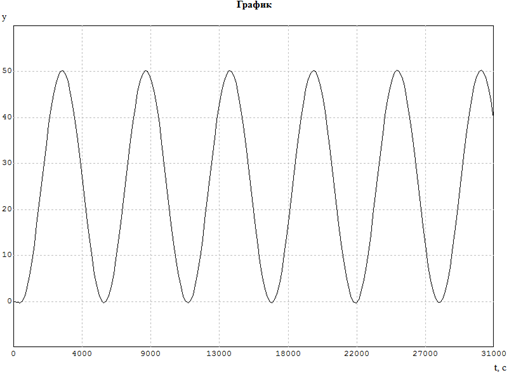
В результате моделирования САР, в соответствии с данными таблицы 2.2, получены графики переходных процессов при различных значениях коэффициента усиления kу (рис.2.3), анализ которых показывает следующее:
- критический коэффициент усиления kукр =875(рис. 2.3, б);
- процесс регулирования при коэффициенте усиления, большем критического, неустойчивый (рис.2.3, а);
- при коэффициенте усиления ниже критического на 20% процесс регулирования имеет явно выраженный колебательный характер, неудовлетворительный с позиции качественных показателей САР (рис. 2.3, а)
при коэффициенте усиления kу, обеспечивающем удовлетворительные динамические показатели качества (σ %, n, tp), система не отвечает требованиям, предъявляемым к значению статической ошибки (рис. 2.3, б).
Таким образом, для достижения заданных показателей качества процесса регулирования необходима коррекция исходной САР, которую выполним с помощью ПИД-закона регулирования.
А)
Б)
Рисунок 2.3 Графики переходных процессов САР: а- неустойчивый при k1=30; б-на границе устойчивости, k1=k1кр=29
2.2 Расчет параметров типового закона регулированияСтруктурная схема принятого для коррекции САР типового ПИД-закона регулирования, параметры kп,kд и kи которого являются варьируемыми (настраиваемыми). Изменяя их, можно добиться желаемого (заданного) процесса регулирования. Рациональные значения данных параметров определим с помощью эмпирического метода Циглера-Никольса.
Для расчета параметров ПИД-закона регулирования необходимы числовые значения критического коэффициента П-закона регулирования исходной САР (рис. 2.1) kп кр=k1 при период не затухающих гармонических колебаний Ткр, который определяется непосредственно по графику, показанному на рис. 2.3, б. Значения этих параметров, согласно результатам моделирования исходного варианта САР, следующие: kп кр=k1 кр=875; Ткр=4850 с.
Для расчета параметров kп,kд и kи воспользуемся формулами Циглера-Никольса применительно к ПИД-закону регулирования:
kп= 0,6 kкр; (17)
kд =0,075kп крТкр; (18)
kи=1 ,2 kп кр /Ткр; (19)
kп= 0,6 875 = 525;
875 = 525;
kД= 0,0754850525 = 190968,75;
kИ= 1,2 kп кр/Ткр= (1,2525)/4850 = 0,13.

Рисунок 2.4 Структурная схема ПИД-закона регулирования: kn=k1
2.3 Компьютерное моделирование скорректированной САРСхемное окно ПК «МВТУ» введенной структурной схемы моделирования скорректированной САР показано на рис.2.5. Блоки 3, 12, 13, 14, и 15 реализуют ПИД-закон регулирования. Их параметры определены с помощью метода Циглера-Никольса и приведены в таблице 2.3.
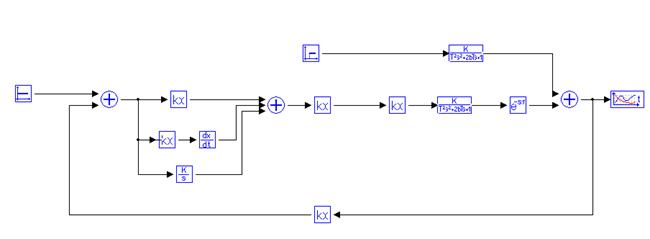
Рисунок 2.5 Схемное окно с введенной структурной схемой САР и ПИД-законом регулирования
2.4 Оценка качества скорректированной САР ,значения параметров дополнительных блоков структурной схемы
Таблица 2.3
|
Блок |
Параметр |
Значение |
|
3 |
Коэффициента усиления |
440 |
|
12 |
Коэффициент усиления |
280000 |
|
13 |
Коэффициент усиления |
0,13 |
|
14 |
Вектор начальных условий |
0 |
|
15 |
Весовые множители для каждого входа |
111 |
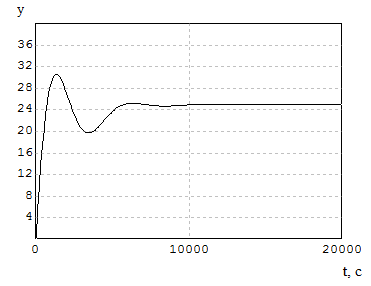
Рисунок 2.6 Графическое окно с графиком переходного процесса САР с ПИД-законом регулирования (kп = 525; kд =190968,75; kи = 0,13)
2.5 Определение показателей удовлетворяющих заданным требованиямПоказатели качества САР, полученные на основе обработки увеличенного графика (рис. 2.6), следующие.
По заданному воздействию:
- статическая ошибка θ=±1;
- время регулирования tр=6000 с;
- перерегулирование
 (20)
(20)

- количество перерегулирования п=2;
- степень затухания
 (21)
(21)

Из
анализа полученных показателей качества следует, что процесс регулирования САР
с ПИД-законом регулирования удовлетворяет заданным показателям качества.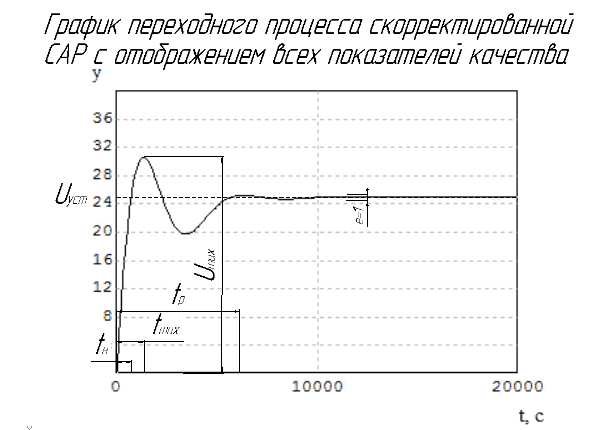
В курсовом проекте решены следующие вопросы, и получены следующие результаты:
· составлена функциональная схема САР;
· определены передаточные функции объекта регулирования и элементов системы;
· составлена структурная схема исходной САР, на основе которой выполнено ее компьютерное моделирование;
· результаты моделирования САР показали, что П-закон регулирования не обеспечивает удовлетворительных показателей качества процесса регулирования;
· в ходе моделирования исходного варианта САР определены параметры процесса регулирования на границе устойчивости системы: kкр – критический коэффициент П-закона регулирования и Ткр – период гармонических колебаний (kкр = 131, Ткр = 5000 с);
· в соответствии с заданием для коррекции САР принят ПИД-закон регулирования, параметры которого (kп, kд, kи) рассчитаны с помощью инженерного метода Циглера-Никольса (kп =78,6; kд = 9,8; kи = 0,03)
· результаты моделирования скорректированной САР (на основе ПИД-закона регулирования с помощью метода Циглера-Никольса) показатели, что она обеспечивает хорошие показатели качества процесса регулирования по задающему воздействию, но не удовлетворяет требованиям к качеству по возмущению;
· посредством подбора параметров ПИД-закона регулирования определены их значения (kп = 0,3, kд =500, kи =0,1), при которых САР обеспечивает требуемые показатели качества процесса регулирования как по задающему, так и по возмущающему воздействию.
Список используемой литературы1. Афанасьев К.Е. Техника использования метода граничных элементов в задачах сосвободными границами / Афанасьев К.Е., Самойлова Т.И. //Вычислительные технологии. 1995. Вып. 7. №11 С. 19-37.
2.
Афанасьев К.Е. Параллельное программирование:
достоинства и недостатки /Афанасьев
К.Е., Стуколов СВ., Малышенко СВ. // Материалы Международной научно-методической конференции «Новые
информационные технологии в университетском
образовании». Кемерово, 2002. С. 211-213.
3.
Афанасьев К.Е. Электронный учебно-методический комплекс «Многопроцессорные
вычислительные системы и параллельное программирование» / Афанасьев К.Е.,
Стуколов
СВ. // Труды X Всероссийской научно-методической конференции «Телематика-2003». СПб, 2003. С. 336.
4. Березин И.С. Методы вычислений /Березин И.С, Жидков Н.П. М.:Физматгиз,1966. Т.1.
5.Вендеров A.M. CASE-технологии. Современные методы и средства проектирования информационных систем. М.: Диалог-МГУ, 1998.
6. Голуб Дж. Матричные вычисления / Голуб Дж., Ван Лоун Ч.; Пер. с англ. М.: Мир, 1999.548 с.
7. Дацюк В.Н. Методическое пособие по курсу «Многопроцессорные системы параллельное программирование» / Дацюк В.Н., Бцкатов А.А., Жегуло А.И.;Ростов, госун-т. Ростов-на-Дону, 2000. Ч. 1. 36 с; Ч. II. 65 с.
8. Общие технические требования к АСР, Москва, Госкомсвязи, 1998. www.consultant.ru
10.Тамми Сакс. Дизайн и архитектура современного Web-сайта. Опыт профессионалов/Тамми Сакс, Гари Мак-Клейн //Диалектика. 2002. С. 320.
 (zip - application/zip)
(zip - application/zip)










