











Министерство образования и науки РФ
Южно-Уральский государственный университет (НИУ)
Филиал ЮУрГУ в г. Сатке
Кафедра «Технология строительных материалов»
Пояснительная записка к курсовому проекту
140400.2016.368.00.00.ПЗ
Дисциплина: «Микропроцессорные системы управления электроприводом».
Тема: Автоматизация выгрузки пыли из бункера с пылеулавливающей камерой.
|
Руководитель проекта |
|
||||||
|
Борисов С.В |
|||||||
|
« |
» |
2016 г. |
|
||||
|
|||||||
|
Автор проекта |
|
||||||
|
студент(ка) группы СТ-Эл.з. 590 |
|
||||||
|
Гайфуллин Д.Г. |
|||||||
|
« |
» |
2016 г. |
|
||||
|
|||||||
|
|||||||
Сатка
2016
Оглавление
Введение. 3
1. Технологический процесс. 4
2. Выбор датчиков. 7
3. Выбор электрооборудования. 10
3.1 Пневмораспределитель. 10
3.2 Электродвигатель. 10
3.3 Устройство плавного пуска. 11
3.4 Программируемый логический контроллер. 13
4. Схема. 15
5. Карта программирования. 16
Библиографический список. 17
Введение
Фильтрующие элементы фильтра могут быть выполнены в виде тканевых рукавов, мешков, полотен. Запыленный газ пропускается через ткань, в результате чего на поверхности ткани и в ее порах осаждается пыль. По мере увеличения толщины слоя пыли возрастает сопротивление фильтра, поэтому осевшую на ткани пыль периодически удаляют.
Процесс фильтрации газа зависит от типа ткани и вида пыли. Гладкие и неворсистые ткани сравнительно легко пропускают запыленный газ. В порах таких тканей задерживаются только крупные частицы пыли. Фильтр начинает хорошо задерживать мелкую пыль только после накопления на поверхности фильтрующих элементов слоя пыли. Для ворсистых, шерстяных тканей с мелкими порами влияние начального слоя пыли менее заметно. Ворсистые ткани целесообразно применять при улавливании зернистой гладкой пыли, а при улавливании волокнистой пыли – лучше гладкие ткани.
Тканевые фильтры применяются для очистки больших объемов воздуха со значительной концентрацией пыли на входе (до 60 г/м3). В качестве фильтрующих элементов в этих аппаратах часто используются тканевые рукава, которые обеспечивают тонкую очистку воздуха от пылевых частиц, имеющих размер менее 1 мкм. Известны всасывающие и нагнетательные рукавные фильтры.
Всасывающие фильтры устанавливаются до вентилятора, т. е. на его всасывающей линии, нагнетательные – на нагнетательной линии. Воздух, очищенный в рукавах нагнетательных фильтров, поступает непосредственно в помещение, где установлены фильтры.
1. Технологический процесс
Рассмотрим технологический процесс очистки загрязнённого воздуха от твёрдых и тяжёлых примесей (рис. 1.1).
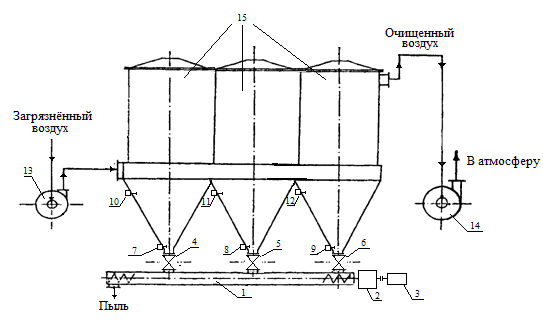
Рисунок 1.1 Технологический процесс очистки загрязнённого воздуха:
1 – винтовой питатель; 2 – редуктор; 3 – асинхронный двигатель; 4, 5, 6 – шиберная заслонка; 7, 8, 9 – вибрационный датчик нижнего уровня; 10, 11, 12 - вибрационный датчик верхнего уровня; 13, 14 – центробежный вентилятор; 15 – бункер с пылеулавливающей камерой.
Загрязнённый воздух поступает в центробежный вентилятор 13 и нагнетается в бункер с пылеулавливающей камерой 15, где очищается с помощи рукавной системы фильтрации. Очищенный воздух высасывается из бункера с пылеулавливающей камерой центробежным вентилятором 14 и нагнетается в атмосферу. После фильтрации пыль оседает в бункере (рис. 1.2), достигнув вибрационного датчика верхнего уровня 10, 11, 12 включается асинхронный двигатель 3, открывается шиберная заслонка 4, 5, 6, пыль продвигается по винтовому питателю 1, после достижения пыли нижнего вибрационного датчика 7, 8, 9, закрывается шиберная заслонка 4, 5, 6 и останавливается двигатель 3.
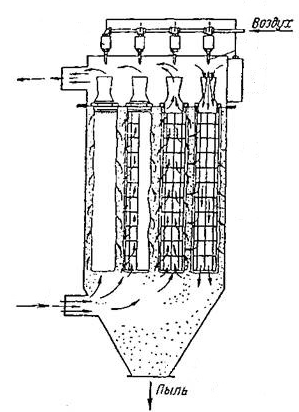
Рисунок 1.2 Процесс очистки загрязнённого воздуха.
Рассмотрим автоматизацию технологического процесса очистки бункера от пыли (рис. 1.3). Данной системой будет управлять программируемый контроллер в систему которого входят шесть вибрационных датчиков 10, 11, три электромагнитных клапана пневомораспределителя, один частотный преобразовать управляющий электродвигателем 13: При достижении тяжёлых примесей на один из датчика верхнего уровня 10 подаётся сигнал на контроллер, прекращается нагнетание и откачка воздуха, контроллер даёт команду устройству плавного пуска на запуск электродвигателя 13. После выдержки времени контроллер даёт команду электромагнитным пневмораспределителям 9 на открытие шиберных заслонок 7. После достижении тяжёлых примесей ниже каждого из вибрационных датчиков нижнего уровня 11 контроллер через пневмораспределитель закрывает шиберные заслонки и после выдержки времени останавливает электродвигатель.

Рисунок 1.3 Бункер с пылеулавливающей камерой:
1 – воздуховод очищенного воздуха; 2 – фильтрующие рукава; 3 – воздуховод запылённого воздуха; 4 – бункер; 5 – пневматическая система продувки фильтрующих рукавов; 6 – винтовой питатель; 7 – шиберная заслонка с пневматическим приводом; 8 – блок подготовки воздуха; 9 – пневмораспределитель; 10 – вибрационный датчик верхнего уровня; 11 – вибрационный датчик нижнего уровня; 12 – редуктор; 13 – асинхронный двигатель.
2. Выбор датчиков
В качестве датчика уровня выбираем вибрационный датчик INNOLevel Vibro – вибрационный сигнализатор предельного уровня сыпучих материалов (рис. 2.1).
Применяется для контроля уровня заполнения во всех видах емкостей и бункеров. Датчик может быть использован для всех порошкообразных и гранулированных сыпучих материалов, плотность которых выше чем 30 г/л и которые не склонны к сильному образованию отложений.
Некоторые области применения:
· производство строительных материалов (цемент, песок, сухие смеси и пр.)
· пищевая промышленность (мука, сода, соль, сухое молоко и пр.)
· полимерная промышленность (полимерный гранулят и пр.)
· деревообрабатывающая промышленность (древесная пыль, опилки)
· химическая промышленность
· дозаторы
Вибрационный сигнализатор INNOLevel Vibro размещается на емкости (сверху или сбоку) на требуемой для выполнения измерений высоте.
Принцип работы:
Зонды датчика вибрируют под пьезоэлектрическим воздействием на определенной механической резонансной частоте. При покрытии зондов загружаемым материалом возникает затухание колебаний, которое электронно регистрируется и срабатывает соответствующий выход переключения.

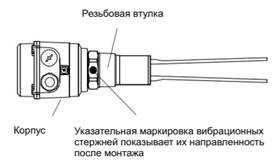
Рисунок 2.1 Вибрационный датчик
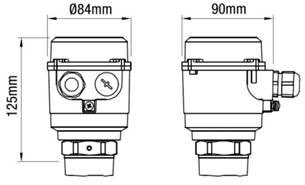
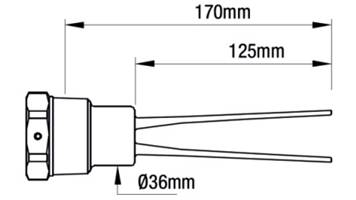
Рисунок 2.2 Размеры датчика
Электрические характеристики:
Таблица 2.1
|
Соединительные клеммы |
0.14 - 2.5мм2 (AWG 26-14) |
|
Кабельный ввод |
M20 x 1,5 винтовое соединение кабеля |
|
Задержка сигнала |
Зонд свободен -> покрыт ок. 1 сек. Зонд покрыт -> свободен ок. 1..2 сек. |
|
Измерительная частота |
прибл. 200 Гц |
|
Категория установки |
III |
|
Степень загрязнения |
2 |
|
Напряжение питания |
19..230В 50-60Гц +10% макс. 18 ВА 19..50В DC +10% макс. 2 Вт |
|
Выходной сигнал |
Реле без потенциала DPDT AC макс. 250В, 8A не индуктивн. DC макс. 30В, 5A не индуктивн. |
|
Изоляция |
Напр. пробоя (сигн. выход): 2225Vrms Напр. пробоя (питание): 2225Vrms |
|
Класс защиты |
I |
Общие характеристики:
Таблица 2.2

Настройка:
Для датчика верхнего уровня устанавливаем переключатель в положение FSL (рис. 2.3) – Зонд используется как сигнализатор заполнения. Установить предохранительный режим максимума „FSH“. Исчезновение питания/обрыв провода действует как сигнализация заполнения (защита от переполнения).
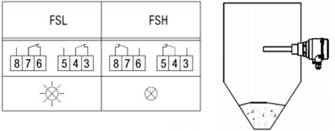
Рисунок 2.3 Режим FSL
Для датчика нижнего уровня устанавливаем переключатель в
положение
FSH (рис. 2.4) – Зонд используется как сигнализатор опорожнения. Установить
предохранительный режим минимума „FSL“. Исчезновение питания/обрыв провода
действует как сигнализация опорожнения (например, защита от работы
всухую).
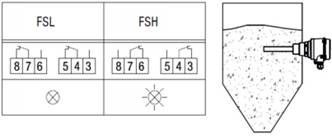
Рисунок 2.4 Режим FSH

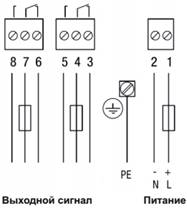
Рисунок 2.3 Печатная плата
3. Выбор электрооборудования
3.1 Пневмораспределитель
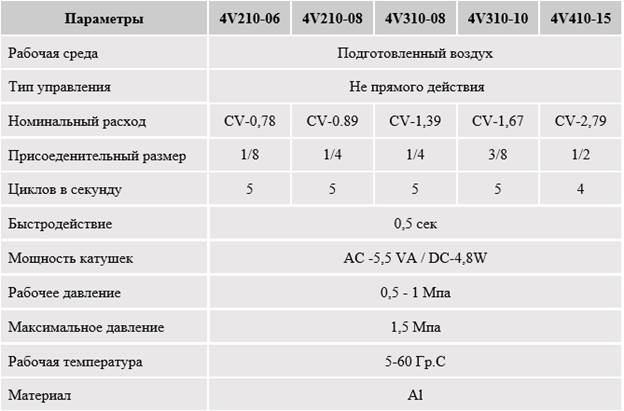
Пятилинейный пневмораспределитель с электромагнитным управлением серии 4V210 (рис. 3.1.1), компании AirTAC, применяется для управления двухсторонними пневмоцилиндрами. В таблице 3.1.1 характеристики пневмораспределителей.

Рисунок 3.1.1 Пневмораспределитель
Таблица
3.1.1
3.2 Электродвигатель
Выбор электропривода для винтового питателя производим согласно заданного условия: S = 5 кВт; N = 1000 об/мин. Данному условию соответствует асинхронный двигатель АИР132S6
Технические характеристики электродвигателя АИР 132S6:
Таблица 3.2.1
|
Двигатель |
Мощность, |
Номинальная |
Номинальный ток |
Номинальный |
КПД, |
Cos φ |
Iпуск/ |
Мпуск/ |
Ммакс/ |
Ммин/ |
Масса, |
|
АИР132S6 |
5,5 |
960 |
22,9 / 13,3 |
54,7 |
83,1 |
0,76 |
7,0 |
2,0 |
2,2 |
1,6 |
52,3 |
Габаритные, установочные и присоединительные размеры электродвигателя АИР 132S6
Таблица 3.2.2
|
Двигатель |
Габаритные размеры |
Установочные и присоединительные размеры, мм |
||||||||||||||||||||||||
|
l30 |
l33 |
h31 |
d30 |
b10 |
l10 |
l31 |
d1 |
d2 |
l1 |
l2 |
b1 |
b2 |
h5 |
h6 |
h1 |
h2 |
h |
h10 |
d10 |
d20 |
d25 |
d24 |
l20 |
d22 |
l21 |
|
|
L |
LC |
HD |
AC |
A |
B |
C |
D |
DА |
E |
ЕА |
F |
FА |
GA |
GС |
GD |
GF |
H |
HА |
K |
M |
N |
P |
T |
S |
LA |
|
|
АИР132S6 |
483 |
568 |
295 |
252 |
216 |
140 |
89 |
38 |
38 |
80 |
80 |
10 |
10 |
41 |
41 |
8 |
8 |
132 |
16 |
12 |
300 |
250 |
350 |
5 |
19 |
14 |
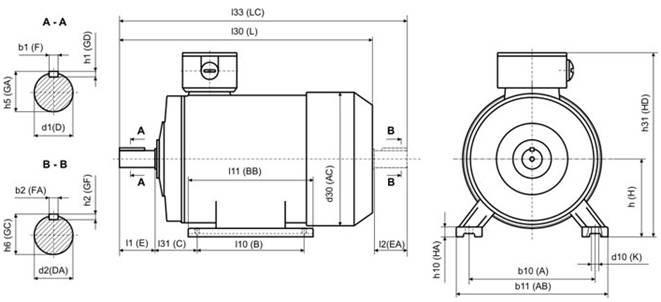
Рисунок 3.2.1 Асинхронный двигатель АИР 132S6
3.3 Устройство плавного пуска
Применение
устройств плавного пуска позволяет уменьшить пусковые
токи, снизить вероятность перегрева двигателя, повысить срок службы
двигателя, устранить рывки в механической части привода в момент пуска и
останова двигателей.
Наряду с
эффектом от плавного пуска, устройства плавного пуска
позволяют снизить активную потребляемую мощность, существенно снизить
реактивную мощность, защитить двигатель, снизить шум, нагрев и вибрацию
электродвигателя.
Появление
устройств плавного пуска на основе фазового метода
регулирования и их совершенствование все чаще приводит потребителя к
выбору такого устройства именно тогда, когда нет острой необходимости
регулирования скорости вращения электропривода или есть возможность
решить эту проблему количеством параллельно включаемых механизмов и
повторно-кратко временным режимом их работы.
Преимущества
устройств плавного пуска на основе фазового метода, в
сравнении с частотными преобразователями, когда не нужно регулирование
скорости, также очевидны: значительно меньшие стоимость и потери от
прямого падения напряжения на силовых элементах, простота схемы
подключения и, как следствие, большая надежность, наличие гармонических
составляющих только во время пуска, хотя при частых пусках оказывается
необходимым применение силовых противопомеховых фильтров.
При этом качество плавного пуска при фазовом методе почти не отличается
от частотного пуска.
Для асинхронного двигателя АИР 132S6 выбираем УПП компании Siemens 3RW3017-1BB14 (рис. 3.3.1).
Описание: Устройство плавного пуска, серия SIRIUS 3RW30. Типоразмер S00. Для стандартного подключения 3-х фазных электродвигателей: расчётный рабочий ток 12.5А, ориентировочная расчётная мощность 5.5 кВт при рабочем напряжении 400 В, 3 кВт при 230 В. Диапазон рабочих температур от минус 25 до плюс 60 градусов С (Мощность указана при температуре окружающей среды 40 градусов С). Расчётное рабочее напряжение AC от 200 до 480В. Расчётное питающее напряжение цепей управления AC/DC 110...230В. Начальное напряжение, от 40 до 100 %. Время пуска - регулируемое, от 0 до 20 с.
Функции: мягкий пуск, встроенные обводные (шунтирующие) контакты (Bypasse), UL-CSA, маркировка CE. Допустимое количество пусков в час без использования вентилятора при повторно-кратковременном режиме работы - 60. (Для типоразмера S00 установка вентилятора как опции невозможна). Без регулировки выбега (торможения). Вид защиты IP20. Крепление на DIN-рейку или винтовое. Рекомендуемые области применения: насосы, компрессоры, транспортёры.

Рисунок 3.3.1 Устройство плавного пуска Siemens 3RW3017-1BB14
3.4 Программируемый логический контроллер
Программируемые контроллеры Omron способны удовлетворить потребности в сфере автоматизации, будь то простое решение или сложная система высокоскоростного управления.
Компания Omron предлагает полный ассортимент компактных и модульных ПЛК с единой архитектурой, способных удовлетворить потребности в случае расширения или модернизации системы управления оборудованием с учетом требований технологического процесса. Это означает полную совместимость программ по распределению памяти и набору команд при переходе от младших серий контроллеров к старшим.
Для управления технологическим процессом выбираем контроллер Omron CPM1A-20CDR-D-V1 (рис. 3.4.1): 24 VDC, 12 DC входов, 8 релейных выходов. Напряжение питания 24 В постоянного тока. Объем программы 2048 слова, объем данных 1024 слова, 2 прерывания по входу (0.3 мс). 14 типов основных инструкций и 79 специальных. 1 прерывание по времени (0.5 мс...5 мин). Нет возможности расширения. 128 таймеров/счетчиков. Счетчик импульсов 5 кГц. Размер 86*90*50 мм.

Рисунок 3.4.1 ПЛК Omron CPM1A-20CDR
4. Схема
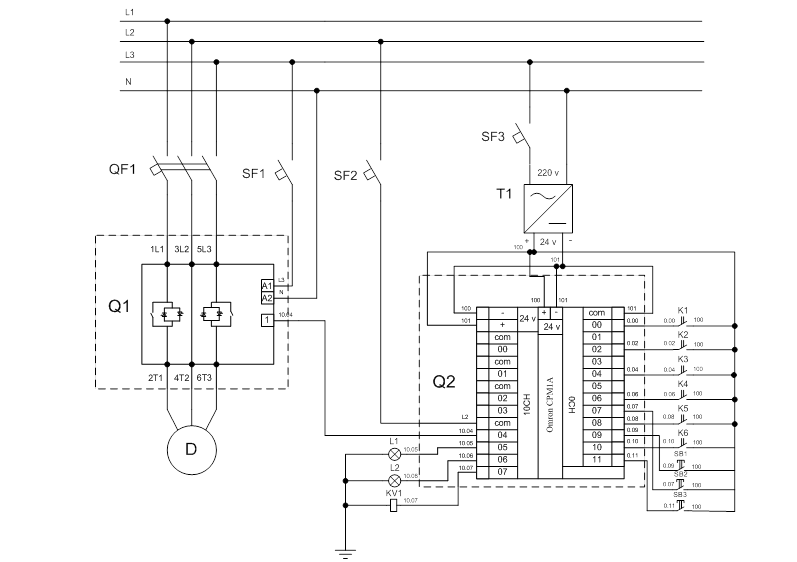
QF 1 – трёхфазный автоматический выключатель
SF 1;2;3 – однофазный автоматический выключатель
T 1 – понижающий трансформатор-выпрямитель
L 1 – лампа индикации работы двигателя
L 2 – лампа индикации открытия шиберных заслонок
KV 1 – катушка контактора для открытия шиберных заслонок
K 1;2;3;4;5;6 – контакты вибрационных датчиков
SB 1 – кнопка пуска двигателя и открытия шиберных заслонок
SB 2 – кнопка остановки двигателя и закрытия шиберных заслонок
SB 3 – кнопка преждевременного закрытия шиберных заслонок
Q1 – устройство плавного пуска:
A1; А2 – клеммы питание устройства плавного пуска
1 – клемма сигнала на запуск электродвигателя
Q2 – программируемый
логический контроллер
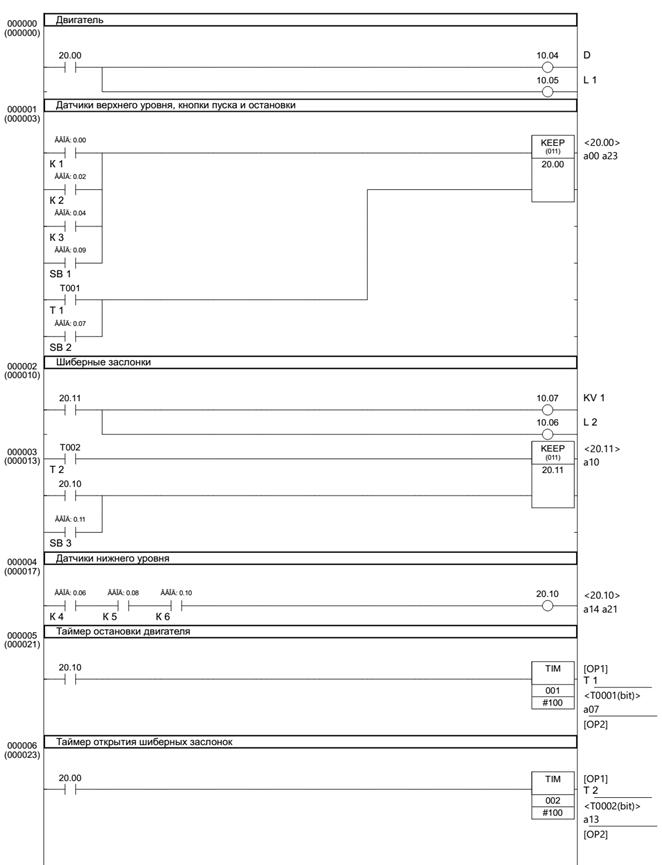
5. Карта программирования
Библиографический список
1. Горинштейн Л.Л., Основы автоматики и автоматизация производственных процессов, М.: 1985.
2. Дроздов В.Ф. Промышленная вентиляция. М.: 1988. – 263 с.
3. https://omron.ru/ru/home
4. http://dfpd.siemens.ru/?id=724
 (zip - application/zip)
(zip - application/zip)









