












Содержание.
Введение………………………………………………….……………………….3
Исходные данные…………………………………………………..……………4
I. Описание принципов кодирования и декодирования модифицированным кодом Хэмминга....................................................6
1. Процедура кодирования………………………………………..……………………….….6
2. Процедура декодирования……………………….……………………………8
II. Описание работы системы автоматического регулирования (САР)………………………………………………………………………11
1. Структурная схема САР………………………………….………………….11
2. Структурная схема блока Peredacha……………………………..…………..14
3. Структурная схема линии связи с искажениями….……………..………….18
4. Структурная схема модели блока Priyem………………………...………….20
5. Local_SAR – модель локальной системы автоматического регулирования технологического параметра……………………………………………………26
III. Обработка результатов эксперимента………………….……………….30
Характеристики локальной САР………………………….……….……………30
1. 2. Моделирование ошибок различной кратности и определение вероятностей необнаруженной трансформации……………………………31
Выводы……………………………………………………………….………….33
Список использованной литературы……………………….……………….35
Введение.
Данная работа направлена на получение навыков разработки устройств организации телемеханического канала связи между пунктом управления и объектом управления, осуществления их настройки и исследования их характеристик. Так же будет разработана структурная схема системы автоматического регулирования замкнутого типа, осуществлена её настройка и анализ качества регулирования.
Исходные данные.
– количество передаваемых уставок по телемеханическому каналу связи – 16;
– в случае обнаружения ошибок в принимаемом сообщении должна
использоваться уставка с десятичным номером «0»;– используемый для передачи сообщений помехозащитный код – модифицированный код Хемминга, а также так же режим работы декодирующего устройства – обнаружение ошибок;
– вероятность искажения
одиночного символа в канале связи 
– характеристики каждого из используемых помехозащитных кодов для проведения расчетов: количество различных сообщений – 16, общее количество символов в сообщении – 8, минимальное кодовое расстояние – 4;
– время моделирования 12,8 сек, максимальный шаг моделирования 0,01 сек;
– программа изменения уставок заданного параметра технологического процесса с шагом 0.1 сек [9999977773333];
– тип регулятора ПИД;
– типовой переходной процесс с 20% перерегулированием;
– кривая разгона объекта регулирования указана на рис. 1;
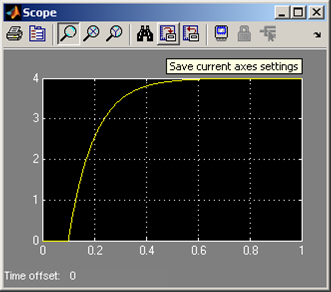
Рисунок 1.
– закон изменения возмущения во времени однополярные прямоугольные импульсы с амплитудой 1 и периодом 0.25;
Переместить в расчетную часть
Сведения о параметрах настроек регуляторов:
– статический
коэффициент передачи регулятора  ,
где
,
где
 - замедление
отклика, статический коэффициент передачи и постоянная времени объекта регулирования
соответственно.
- замедление
отклика, статический коэффициент передачи и постоянная времени объекта регулирования
соответственно.
– время изодрома 
– время предварения
регулятора 
I. Описание принципов кодирования и декодирования модифицированным кодом Хэмминга.
1. Процедура кодирования.
Вписать сведения о своем коде из конспекта.
Код Хэмминга исправляет ошибки кратности 1 и является разделимым. Обычный код Хэмминга имеет кодовое расстояние d=3. Этот код способен исправлять ошибки кратности 1 и обнаруживать ошибки кратности 2. Чтобы код Хэмминга одновременно исправлял одиночные ошибки и обнаруживал двойные, необходимо придать ему кодовое расстояние d=4. Для этого добавляется еще один контрольный разряд, который проверяет четность единиц в информационных и основных контрольных разрядах.
По
условию задания число сообщений  ,
поэтому число информационных разрядов
,
поэтому число информационных разрядов  будет:
будет:

При
n=8 неравенство 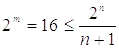 выполняется.
Оно бы выполнялось и при n=7,
однако по нам по условию задачи необходимо работать с модифицированным кодом
Хэмминга для обнаружения двойных ошибок, поэтому в код добавлен один
контрольный разряд. В итоге имеем: n=8,
m=4, k=4.
выполняется.
Оно бы выполнялось и при n=7,
однако по нам по условию задачи необходимо работать с модифицированным кодом
Хэмминга для обнаружения двойных ошибок, поэтому в код добавлен один
контрольный разряд. В итоге имеем: n=8,
m=4, k=4.
Искомое
слово имеет 8 разрядов. Из них контрольных 4. За контрольные разряды
принимаются разряды, десятичный номер которых равен степени числа 2. Это
разряды  (см. табл.1).
(см. табл.1).
Таблица 1.
|
Разряд |
К |
К |
И |
К |
И |
И |
И |
К |
|
Десятичный номер разряда |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Двоичный номер разряда |
0001 |
0010 |
0011 |
0100 |
0101 |
0110 |
0111 |
1000 |
|
Буквенное обозначение разряда |
r1 |
r2 |
k1 |
r3 |
k2 |
k3 |
k4 |
r4 |
|
Переданное слово |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
К примеру, возьмем передачу слова «9» в двоичном коде. 910=10012. Запишем в это слово в соответствующие буквенным обозначениям разрядов k1-k4 ячейки табл.1.
Для
того чтобы определить значения контрольных разрядов, составляют контрольные
суммы  .
.
Сумма
- это сумма по модулю
два значений разрядов, двоичные номера которых имеют единицу на i-
м месте справа.
Сумма
по модулю два равна 1, если число единиц в сумме нечетно, и равна 0, если число
единиц четно. В каждую контрольную сумму с первой по третью входит только один
контрольный разряд. Это вытекает из того, что двоичные номера контрольных
разрядов имеют только одну 1. Это свойство позволяет доопределить контрольные
разряды независимо друг от друга. Восьмой контрольный разряд  проверяет
четность единиц в информационных и основных контрольных разрядах, т.е.
проверяет
четность единиц в информационных и основных контрольных разрядах, т.е.  . Доопределим их так,
чтобы контрольные суммы были равны 0.
. Доопределим их так,
чтобы контрольные суммы были равны 0.
Тогда:




Заполним
полученными результатами ячейки в табл.1 обозначенные соответствующими
буквенными обозначениями разрядов  .
.
Этап кодирования завершен. Передано кодовое слово Хэмминга: 00110011.
2. Процедура декодирования.
На приемном конце ставится схема расчета контрольных сумм. И если в принимаемом коде контрольные суммы равны 0, то ошибки нет, если же хотя бы одна контрольная сумма равна 1, то произошла ошибка. В этом случае контрольные суммы рассматриваются как разряды двоичного числа, десятичный эквивалент которого указывает номер искаженного разряда. Рассмотрим на примере из табл. 2.
Таблица 2.
|
Разряд |
К |
К |
И |
К |
И |
И |
И |
К |
|
Десятичный номер разряда |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Двоичный номер разряда |
0001 |
0010 |
0011 |
0100 |
0101 |
0110 |
0111 |
1000 |
|
Буквенное обозначение разряда |
r1 |
r2 |
k1 |
r3 |
k2 |
k3 |
k4 |
r4 |
|
Переданное слово |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
|
Принятое слово с одиночной ошибкой |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
|
Принятое слово с двойной ошибкой |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
1 |
Принято слово с одиночной ошибкой, 7-й
разряд  .
Контрольные суммы будут:
.
Контрольные суммы будут:
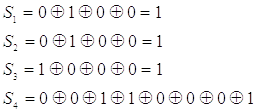
В данном случае контрольная сумма
указывает на наличие ошибки. Двоичное число  , т.е. произошла
ошибка в 7 разряде. Исправление ошибки состоит в изменении значения искаженного
разряда на противоположное.
, т.е. произошла
ошибка в 7 разряде. Исправление ошибки состоит в изменении значения искаженного
разряда на противоположное.
Рассмотрим случай двойной ошибки. Контрольные суммы будут:
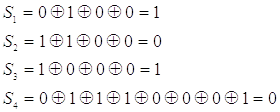
В данном случае двойная ошибка
обнаруживается хотя бы при одной  ,
но не исправляется.
,
но не исправляется.
При приеме модифицированного кода Хэмминга возможно:
-
ошибки
нет – все суммы  , и
проверка на четность подтверждается;
, и
проверка на четность подтверждается;
-
есть
одиночная ошибка в информационных и основных контрольных разрядах, она
исправляется – хотя бы одна сумма  ,
и проверка на четность не подтверждается;
,
и проверка на четность не подтверждается;
-
есть
ошибка дополнительного контрольного разряда, и он исправляется – все суммы , и проверка на
четность не подтверждается;
-
есть
двойная ошибка; она обнаруживается, но не исправляется - хотя бы одна сумма , и проверка на
четность подтверждается.
Расчетные формулы для синтеза схем обнаружения и исправления ошибок (минтермы).
Схемы из матлаб
1. Local_SAR – модель локальной системы автоматического регулирования технологического параметра.
Построим модель локальной системы автоматического регулирования согласно рис.16.
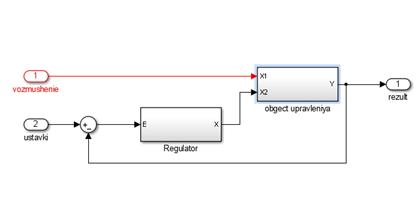
Рисунок 16. Локальная система автоматического регулирования.
Исходными данными для построения данной модели являются следующие характеристики:
– тип регулятора ПИД;
– типовой переходной процесс с 20% перерегулированием;
– кривая разгона
объекта регулирования с определенными параметрами  и
и  представлена
на рис. 17;
представлена
на рис. 17;
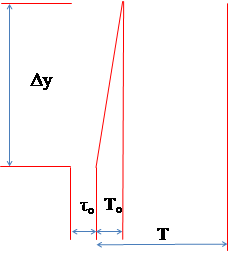

Рисунок 17. Кривая разгона объекта регулирования
Формализация ОР:
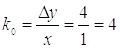
Определим статический коэффициент
передачи объекта регулирования, где  –
изменение выходного сигнала в соответствии с кривой разгона, а единичное
ступенчатое воздействие входного сигнала примем за единицу –
–
изменение выходного сигнала в соответствии с кривой разгона, а единичное
ступенчатое воздействие входного сигнала примем за единицу –  :
:
Привести все параметры объекта регулирования и записать окончательную формулу передаточной функции ОР и схему ОР из матлаб
Передаточная функция объекта регулирования(управления) будет иметь следующий вид, где Т=0,5сек – длительность переходного процесса(из рис. 17):
В среде Simulink строим модель объекта управления:
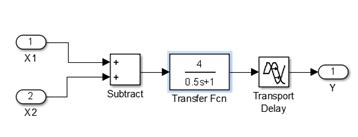
Рисунок 20. Объект управления.
Настройка регулятора:
Привести настроечные формулы и результаты расчета по ним.
Время изодрома
регулятора, где  –
замедление отклика объекта регулирования:
–
замедление отклика объекта регулирования:

Время предварения регулятора:

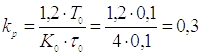
Определим статический
коэффициент передачи регулятора, где  –
постоянная времени объекта регулирования:
–
постоянная времени объекта регулирования:
Структурная схема ПИД-регулятора смешанной структуры представлена на рис. 18.
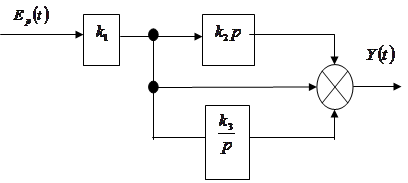 |
Рисунок 18. ПИД-регулятор смешанной структуры.
Здесь:
 ,
,
 ,
,
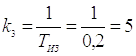 .
.
По полученным данным строим регулятор (рис. 19):
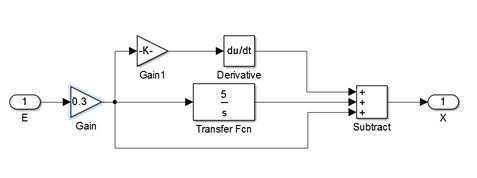
Рисунок 19. ПИД-регулятор.
В задатчике выставим следующую программу изменения уставок:
[9 9 9 9 9 9 7 7 7 7 7 3 3 3 3].
II. Структура системы автоматического регулирования (САР).
2. Структурная схема САР.
Данная система для удобства отображения построена по иерархическому принципу. Её структурная схема содержит основные компоненты, которые по иерархическому принципу содержат в себе другие компоненты, которые могут содержать в и 3-й уровень компонентов схемы. Это сделано для удобства реализации самой схемы. Реализация элементов системы подчиняется «принципу матрешки».
Общий вид САР представлен на рис. 2. На рисунке изображены следующие управляющие элементы и элементы индикации:
– Управляющие элементы:
Programm_Vz – задатчик, в котором должна быть записана программа изменения уставок во времени;
Peredacha – модель передающей стороны системы телемеханики (поста управления);
Line – модель канала связи;
Priyem – модель приемной стороны системы телемеханики (линейного пункта);
Local_SAR – модель локальной системы автоматического регулирования технологического параметра;
Vnesh_vozm – модель внешних возмущений на объект регулирования;
С – генератор тактовых импульсов для автоматического формирования различных ошибок в канале связи;
Kratnost – элемент настройки кратности автоматически подсчитываемых ошибок в канале связи;
– Элементы индикации:
Code_out – индикатор отправляемого передающей стороной в канал связи сообщения в заданном помехозащитном коде;
Code_in – индикатор принятого приемной стороной сообщения в заданном помехозащитном коде;
Result – индикатор подсчитанного количества ошибок заданной элементом Kreatnost кратности в двоичном коде.
OU – осциллограф для отображения процесса регулирования технологического параметра объекта регулирования локальной системой автоматического регулирования.

3. Структурная схема блока Peredacha.
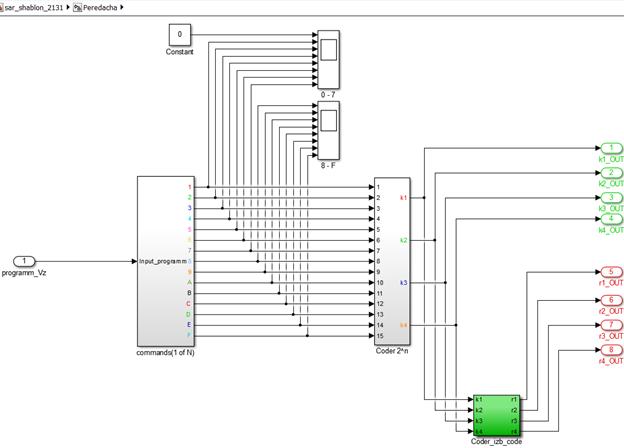 Блок
Peredacha (рис.3)
представляет собой модель поста телеуправления. В различные моменты времени
находящийся на посту управления программный задатчик Programm_Vz
формирует соответствующие требуемые значения регулируемого технологического
параметра Vz.
Блок
Peredacha (рис.3)
представляет собой модель поста телеуправления. В различные моменты времени
находящийся на посту управления программный задатчик Programm_Vz
формирует соответствующие требуемые значения регулируемого технологического
параметра Vz.
Рис. 3. Блок Peredacha.
Состав блока Peredacha.:
Commands (1 of N) – дешифратор команд. Схема дешифратора изображена на рис.4. Выходной сигнал элемента представлен в коде 1 из N, где N – шестнадцатеричный номер команды. Дешифратор команд позволяет определить текущую команду, формируемую задатчиком. На вход поступает значение уставки от 1 до 15. В зависимости от значения уставки, срабатывает схема сравнения (в каждом звене этой схемы записан эквивалент определенного числа, в нашем случае от 1 до 15). В случае совпадения значения подаваемой уставки и эквивалента в схеме сравнения, на выходе ячейки схемы сравнения мы будем иметь логическую единицу.
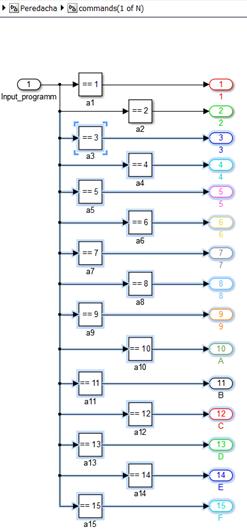
Рис. 4. Дешифратор команд.
Код «1 из N» означает, что только на одном выходе дешифратора присутствует логическая единица (соответствующая передаваемой команде), а на остальных выходах присутствует ноль.
Coder
2^n – кодер обыкновенного двоичного
кода (рис.5). Преобразует код «1 из N»
в код «2^n» (обыкновенный
двоичный код). Данный кодер формирует информационную часть разделимого кода,
которая по сути представляет двоичный код номера передаваемой команды. Состоит
из элементов OR
(ИЛИ).
При подаче на хотя бы один из входов, элемента логической единицы, на выходе
получим логическую единицу. К примеру число 9 соответствует логической единице
на входе 9. Имеем  ,
что соответствует
,
что соответствует  .
.
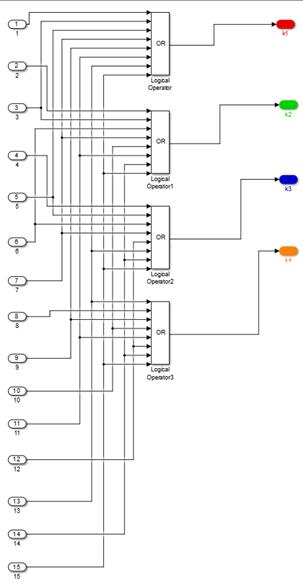
Рис. 4 Кодер обыкновенного кода 2^n.
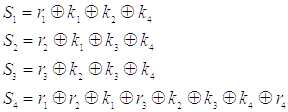
Coder_izb_code – кодер контрольной части разделимого кода построен по принципу кодирования модифицированным кодом Хэмминга и вычисляет значения контрольных разрядов кода. Кодер построен на элементах XOR (исключающее ИЛИ) (Рис.5)
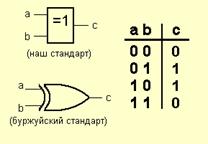
Рисунок 5. Логический элемент XOR (исключающее ИЛИ).
Принцип кодирования контрольных значений, заложенный в моей схеме заложен в данных формулах:

Схема кодера контрольной части разделимого кода изображена на рис.6.
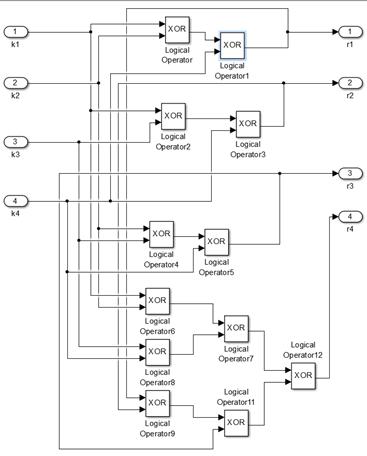
Рисунок 6. Схема кодера контрольной части разделимого модифицированного кода Хэмминга.
Кроме управляющих элементов на схеме приведены индикаторы, для контроля правильности работы управляющих элементов.
4. Структурная схема линии связи с искажениями.
Модель линии связи с искажениями изображена на рис. 7.
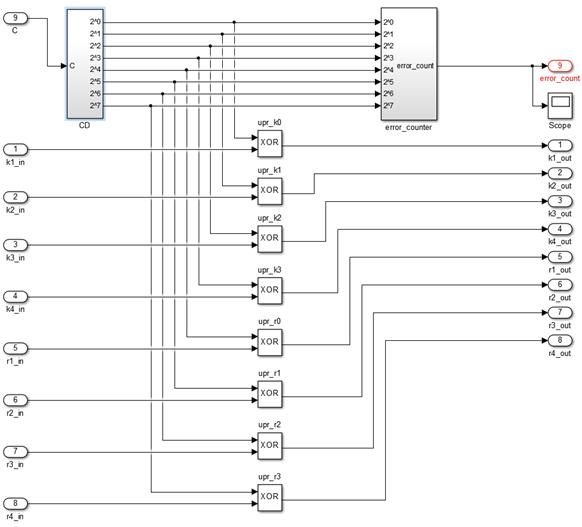
Рисунок 7. Модель линии связи с искажениями.
CD – двоичный восьмиразрядный счетчик для моделирования искажений различной кратности (рис.8). На вход С поступает сигнал с генератора прямоугольных импульсов С для автоматического формирования ошибок с некоторой кратностью.
Элементы XOR – каждый элемент в зависимости от управляющего сигнала, поступающего с соответствующего выхода счетчика, инвертирует, либо повторяет входной сигнал на своем выходе. Таким образом, элементы XOR позволяют вносить различные искажения в передаваемые по линии связи сообщения. Кратность искажения определяется количеством логических единиц на выходах счетчика CD.
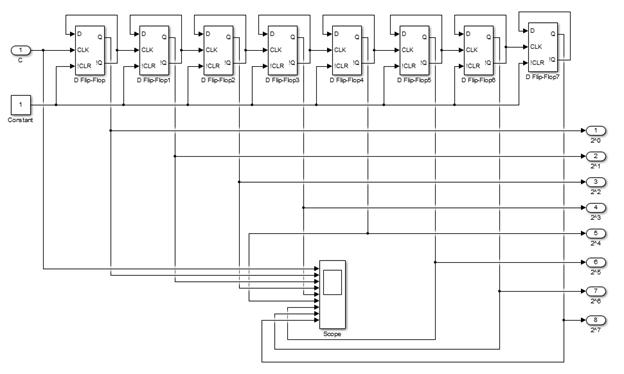
Рисунок 8. CD – двоичный восьмиразрядный счетчик.
Error_counter – счетчик с выходным сигналом в виде десятичного числа (рис.9), показывающего кратность внесенной в передаваемое сообщение ошибки, который передает сигнал в элемент настройки кратности автоматически подсчитываемых ошибок в канале связи.
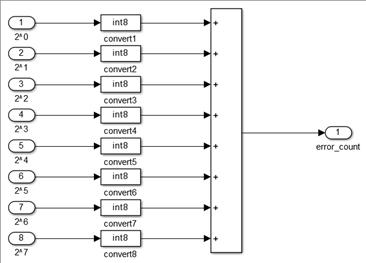
Рисунок 9. Error_counter – счетчик с выходным сигналом в виде десятичного числа.
5. Структурная схема модели блока Priyem (рис.10).
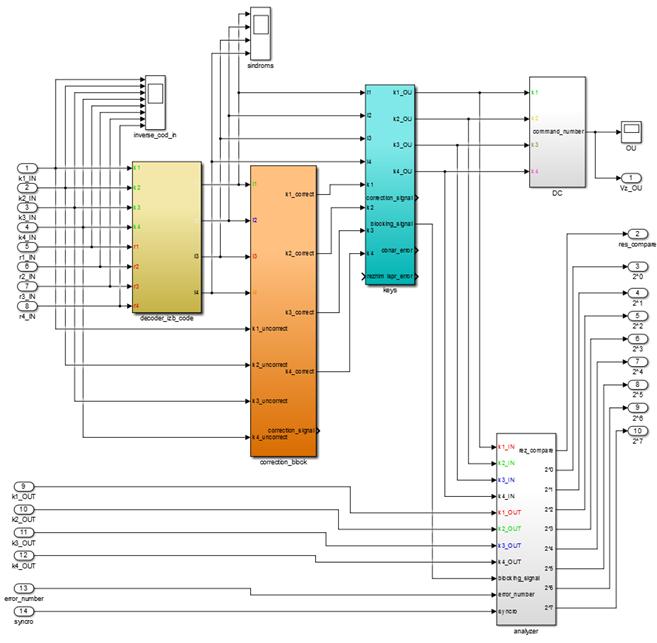
Рисунок 10. Структурная схема модели блока Priyem.
Decoder_izb_code – декодер избыточного кода (рис11) предназначен для вычисления контрольных сумм модифицированного кода Хэмминга. Построен на элементах XOR (исключающее ИЛИ). Вычисление сумм происходит в соответствии с следующими формулами:
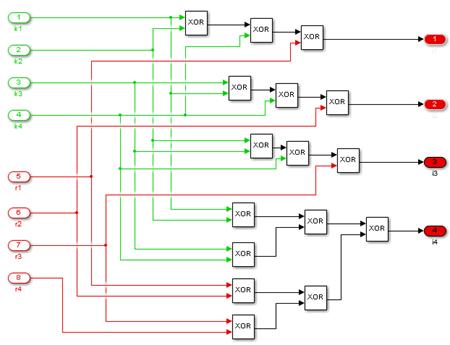
Рисунок 11. Декодер избыточного кода.
При появлении одиночной или двойной ошибки в хотя бы одной контрольной сумме на выходах 1 – 4 будет присутствовать единица. При отсутствии ошибок все контрольные суммы будут иметь значение «ноль».
Correction_block – схема коррекции информационных разрядов принятого сообщения в заданном помехозащитном коде. По условию задачи в моем варианте коррекция ошибок не производится. Поэтому схема будет иметь вид, представленный на рис. 12.

Рисунок 12. Схема коррекции информ. разрядов принятого сообщения.
Keys – схема распознавания одиночных и двойных ошибок представлена на рис. 13.
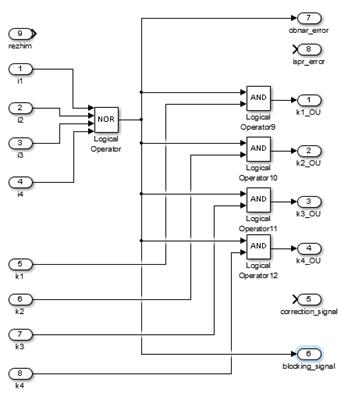
Рисунок 13. Схема распознавания одиночных и двойных ошибок.
При отсутствии ошибок на входах i1 – i4 в наличии логические нули (все контрольные суммы совпали) на выходе элемента NOR (ИЛИ-НЕ) логическая единица. Если одновременно с этим на входах k1 – k4 какое-либо слово в двоичном коде, то оно будет продублировано на выходных выводах k1 – k4 элементами AND (И). Если контрольные суммы не сходятся (наличие одной или 2-х ошибок), то на одном или нескольких входах i1 – i4 присутствует одна или несколько логических единиц. В этом случае на выходе элемента NOR (ИЛИ-НЕ) будет логический ноль, на выходных выводах k1 – k4 элементов AND (И) так же будет логический ноль. Передаваемое слово с ошибкой или ошибками не будет передано со входов на выходы схемы распознавания. При отсутствии ошибки на выходе blocking_signal будет «логическая единица», при наличии «логический ноль».
Analyzer – автоматический двоичный счетчик ошибок заданной кратности представлен на рис.14.
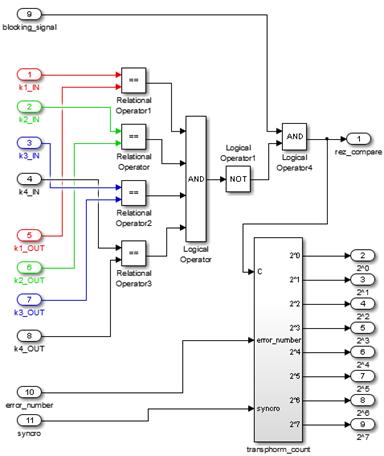
Рисунок 14. Автоматический двоичный счетчик
ошибок заданной кратности.
Анализатор осуществляет поразрядное сравнение передаваемых информационных разрядов и принятых (контрольные не учитываются). И подсчитывает в двоичном коде количество необнаруженных трансформаций заданной элементом Kratnost (рис. 2) кратности. Двоичный код отображается на индикаторе.
DC – дешифратор принятых команд представлен на рис.15. В данной схеме совмещены декодер обыкновенного двоичного кода, построенный на инверторах NOT (НЕ) и элементах конъюнкции AND (И). На элементах логического умножения Product производится перемножение логической единицы, соответствующей числу уставки на эталонное значение уставки. олученное десятичное значение через элемент ADD подается на контрольный осциллограф и локальную САР.
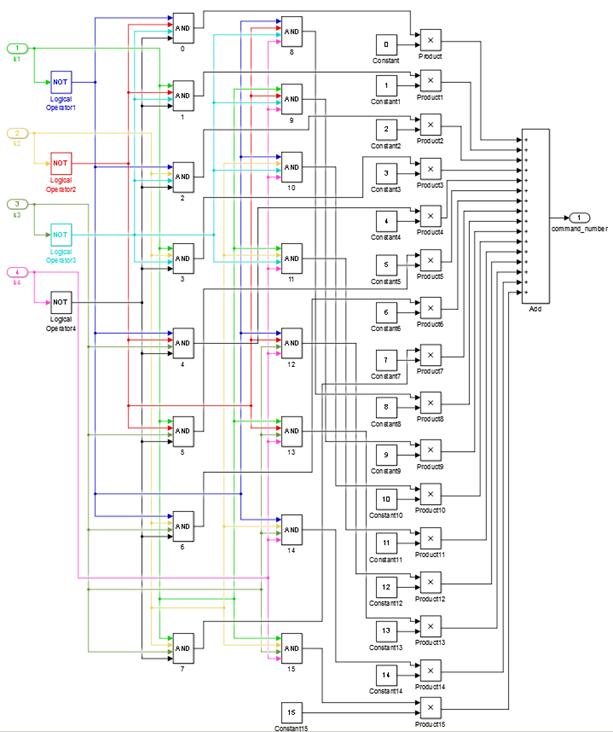
Рисунок 15. DC – дешифратор принятых команд
Экспериментальная часть
1. Запустим процесс симуляции всей системы SAR при отсутствии искажений в линии связи (период возмущений 25.6 сек). На экране виртуального осциллографа OU получим изображения (рис.21):
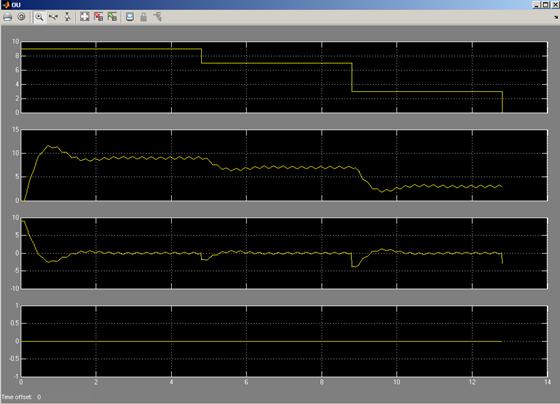
Рисунок 21. Результат работы локальной САР.
На рисунке сверху вниз изображены:
– принятые из линии связи значения уставок;
– реализованный процесс регулирования объекта регулирования;
– график ошибок;
– результат сравнения принятых и полученных значений уставок (0 отличий, что означает – схема функционирует верно).
2. Запустим процесс симуляции ошибок в линии связи
(период колебаний 0.05). Привести описание эксперимента (где менять параметры, откуда снимать показания и проч.)
Заполним таблицу, в которой представлены результаты
подсчета необнаруженных трансформаций различной кратности.
III. Обработка результатов эксперимента.
1. Достигнутые показатели качества регулирования локальной САР.
На вход подаем значение уставки «9», снимаем характеристику (рис. 22)
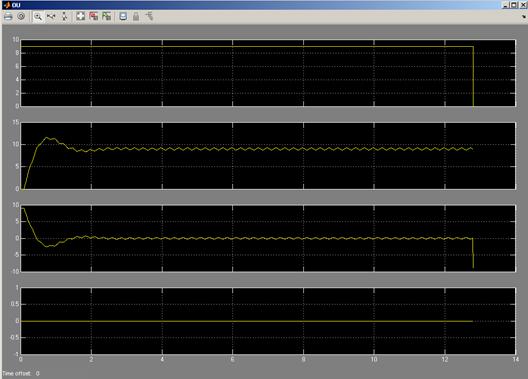
Рисунок 22.
Значение перерегулирования по уставке «9» составит порядка «2», что составляет 22%.
На вход подаем значение уставки «9», отключаем источник помех и снимаем характеристику времени регулирования при нулевой допустимой ошибке (рис. 23). Время регулирования при нулевой ошибке будет tрег=2,4сек.



 |
Рисунок 23.
2. Оценка достоверности передачи команд.
(можно здесь привести вставку из Excel)
Результаты в виде осциллограмм не приведены в связи со слабым различием цвета по их контуру. Расчет проводится по формуле:
 ,
,
где:
 –
вероятность искажения символа (по условию задания);
–
вероятность искажения символа (по условию задания);
 – количество
подсчитанных в модели трансформаций;
– количество
подсчитанных в модели трансформаций;
 – кратность
ошибки.
– кратность
ошибки.
Кратность «0». Ошибок
нет. 
Кратность «1». Ошибок нет. 
Кратность «2». Ошибок
нет. 
Кратность «3». Ошибок
нет. 
Кратность «4» Количество трансформаций N4=7.

Кратность «5». Ошибок
нет. 
Кратность «6». Ошибок
нет. 
Кратность «7». Ошибок
нет. 
Результирующая вероятность необнаруженной трансформации будет:

По результатам работы характеристики САР приведены в табл. 3.
Технические характеристики САР с передачей команд по каналу телеуправления
Таблица 3.
|
Тип характеристики |
Значение |
|
Помехозащищенный код |
Модифицированный код Хэмминга |
|
Число сообщений, N |
16 |
|
Длина слова Хэмминга, n |
8 |
|
Число информационных разрядов, m |
4 |
|
Число контрольных разрядов, k |
4 |
|
Режим работы декодирующего устройства |
Обнаружение ошибок |
|
Вероятность правильной передачи команды |
|
|
Вероятность необнаруженной трансформации команды |
|
|
Вероятность обнаруженной трансформации команды |
|
|
Тип регулятора локальной схемы САР |
ПИД |
|
Настройка регулятора |
Режим с 20% перерегулированием |
|
Значение перерегулирования локальной САР по уставке 9 |
2 |
|
Значение перерегулирования локальной САР по уставке 9, % |
22 |
|
Время регулирования локальной САР при допустимом остаточном отклонении (5%) tрег, сек |
2,4 |
Выводы.
Модифицированный помехозащищенный код Хемминга успешно справляется с обнаружением как одиночных, так и двойных ошибок, а так же при необходимости производит корректировку одиночных ошибок. В моем случае, результирующая вероятность необнаруженной трансформации имеет достаточно низкое значение, что позволяет говорить о высокой надежности модифицированного кода Хэмминга применительно к представленному каналу связи. Расчет схемы локальной САР в целом произведен верно, перерегулирование составляет 22%, а время регулирования 2,4 секунды. Результат регулирования – нормальный. Системы кодирования сигналов, а так же системы локального регулирования позволяют минимизировать влияние внешнего воздействия на каналы связи.
Список использованной литературы.
Л.1 Сапожников В.В., Кравцов Ю.А., Сапожников Вл.В. Теоретические
основы железнодорожной автоматики и телемеханики: Учеб. для вузов
ж.-д. трансп. – М.: Транспорт, 1995
Л.2 Ю.Г. Боровков, доц. А.В. Орлов. Теоретические основы автоматики, телемеханики и связи: Рабочая программа и задание на курсовую работу с методическими указаниями. – М.: РОАТ, 2008
Л.3 А.В. Орлов. Задание на курсовой проект с методическими указаниями по выполнению по дисциплине «Теоретические основы автоматики, телемеханики и связи». – М.: РОАТ, 2014
Л.4 Инструкция: Типы регуляторов. Методика настройки регуляторов. КП
Микрол – Ивано-Франковск: 2011.
 (zip - application/zip)
(zip - application/zip)









