












1 Расчет и выбор СПП
1.1 Выбор СПП по току
Выбираем диоды и тиристоры для нормального режима работы нормальных условий охлаждения, которые характеризуются следующими параметрами:
-частота напряжения питающей сети, f = 50 Гц;
-коэффициент формы тока, Кф =1,57;
-угол проводимости вентиля, (3=180°);
-температура окружающей среды, Та=40°С;
-скорость охлаждающего воздуха, V=6м/с
Для выбора СПП
рассчитывается номинальный ток нагрузки  , А
по формуле
, А
по формуле
 (1.1)
(1.1)
где Рн - номинальная мощность двигателя, Вт ;
 - номинальное напряжение на якоре
двигателя, В;
- номинальное напряжение на якоре
двигателя, В;
 -
номинальный КПД двигателя, %.
-
номинальный КПД двигателя, %.
Подставим значения в формулу (1.1)
 = 36,36 А
= 36,36 А
Зная величину номинального
тока якоря, можно рассчитать средний ток вентиля  , А.
, А.
 (1.2)
(1.2)
Подставим значения в формулу (1.2)
 = 14
= 14 78 А
78 А
Также действующее значение
тока через вентили  ,
А по формуле
,
А по формуле
 (1.3)
(1.3)
Подставим значения в формулу (1.3)
 = 232 А
= 232 А
Тиристоры выбираем по среднему значению
тока через вентиль ,А по формуле
,А по формуле
 (1.4)
(1.4)
где  -
коэффициент запаса по рабочему току. Принимаем
-
коэффициент запаса по рабочему току. Принимаем  = 1
= 1 1;
1;
 - коэффициент
запаса, учитывающий отклонение условий охлаждения и режима работы вентиля от
нормальных. Принимаем
- коэффициент
запаса, учитывающий отклонение условий охлаждения и режима работы вентиля от
нормальных. Принимаем  = 11.
= 11.
Подставим значения в формулу (1.4)
 = 1788 А
= 1788 А
Выбираем тиристор Т122-20 [ ]
1.2 Проверка СПП по максимальному току
Для проверки правильности выбора
тиристора произведём перерасчёт максимального тока в прямом направлении ,А
по формуле
,А
по формуле
 (1.5)
(1.5)
где  -
пороговое напряжение открывания тиристора, В;
-
пороговое напряжение открывания тиристора, В;
rT - динамическое сопротивление в открытом состоянии, Ом;
Tjm - максимальная температура перехода, °С;
Та - температура окружающей среды, °С;
 -установившееся сопротивление
переход-среда, °С/Вт.
-установившееся сопротивление
переход-среда, °С/Вт.
Сопротивление переход - среда  °С/Вт определяем по формуле
°С/Вт определяем по формуле
 (1.6)
(1.6)
где  - тепловое сопротивление переход-корпус, °С/Вт;
- тепловое сопротивление переход-корпус, °С/Вт;
 - тепловое
сопротивление корпус - контактная поверхность ох-ладителя, °С/Вт;
- тепловое
сопротивление корпус - контактная поверхность ох-ладителя, °С/Вт;
 - тепловое
сопротивление контактная поверхность охладителя- охлаждающая среда, °С/Вт.
Принимаем
- тепловое
сопротивление контактная поверхность охладителя- охлаждающая среда, °С/Вт.
Принимаем =
2,1°С/Вт.
=
2,1°С/Вт.
Подставим значения в формулу (1.6)
 0,90 + 0,20 + 2,1=
3,2 Ом
0,90 + 0,20 + 2,1=
3,2 Ом
Подставим значения в формулу (1.5)
 = 14,86 А
= 14,86 А
Проверка выполнения условия
 (1.7)
(1.7)
где -
коэффициент запаса по рабочему току.
Подставим значения в условие (1.7)
11
 17,88
≤ 14,86
17,88
≤ 14,86
19,7  14,86
14,86
Прибор считается выбранным по
току верно, если выполняется условие (1.7), т.к условие (1.8) не выполняется,
то необходимо выбрать тиристор с большим средним значением тока через вентиль  ,А [ ].
,А [ ].
Выполним проверку по максимальному току для тиристора Т132-50.
Выполним расчёт в соответствии с формулой (1.6)
 0,50
+ 0,20 + 2,1 = 2,8 Ом
0,50
+ 0,20 + 2,1 = 2,8 Ом
Выполним расчёт в соответствии с формулой (1.5)
 = 22 А
= 22 А
Считается, что прибор по току выбран правильно, т.к. выполняется условие (1.7)
11
17,88
≤ 22
19,7 ≤ 22
В процессе эксплуатации преобразователей СПП могут подвергаться рабочим и аварийным перегрузкам по току. Например, в преобразователях, используемых в электроприводе, токовые рабочие перегрузки возникают в переходных режимах работы (пуск, торможение, наброс нагрузки выше номинальной). Если через прибор в номинальном режиме работы преобразователя протекает максимально допустимый ток, то рабочие перегрузки недопустимы, так как температура перехода имеет максимально допустимое значение. Выбор приборов по току осуществляется с учетом коэффициента запаса. Поэтому в номинальном режиме работы преобразователя температура перехода ниже максимально допустимой и прибор может быть перегружен током, превышающим номинальный в течение определенного времени, за которое температура перехода достигнет максимально
допустимого значения. Очевидно, что чем больше значение тока перегрузки, тем меньше время, за которое температура перехода достигает максимально допустимого значения и, наоборот.
Из вышесказанного следует, что для обеспечения нормальной работы преобразователя в режимах рабочей перегрузки необходимо для выбранных по току СПП осуществить их проверку по перегрузочной способности.
1.3 Проверка СПП по перегрузочной способности
Для обеспечения нормальной работы преобразователя в режимах рабочей перегрузки необходимо для выбранных по току СПП осуществить их проверку по перегрузочной способности.
Время  , с,
определяется по графику зависимости переходного теплового сопротивления
переход-среда
, с,
определяется по графику зависимости переходного теплового сопротивления
переход-среда  = f(t) для конкретных типов прибора., охладителя и интенсивности охлаждения.
Переходное тепловое сопротивление ,
°С/Вт, для тиристора Т132-50
определяется по формуле
= f(t) для конкретных типов прибора., охладителя и интенсивности охлаждения.
Переходное тепловое сопротивление ,
°С/Вт, для тиристора Т132-50
определяется по формуле
 (1.8)
(1.8)
где  - средние потери мощности при перегрузке,
Вт;
- средние потери мощности при перегрузке,
Вт;
 -
потери мощности предшествующей перегрузке, Вт.
-
потери мощности предшествующей перегрузке, Вт.
Определим потери мощности при токе, предшествующем перегрузке по формуле
 +
+  2
(1.9)
2
(1.9)
Выполним расчёт в соответствии с формулой (1.9)
 = 22 Вт
= 22 Вт
Определим потери мощности для тока, соответствующего перегрузке по формуле
 +
+ 2
(1.10)
2
(1.10)
где  - ток
перегрузки тиристора, А. Принимаем
- ток
перегрузки тиристора, А. Принимаем =
= 
Выполним расчёт в соответствии с формулой (1.10)
 1,03
1,03
 44,7
+ 2,46 – 0,0046 1998,09
= 68,65 Вт
44,7
+ 2,46 – 0,0046 1998,09
= 68,65 Вт
Выполним расчёт в соответствии с формулой (1.8)
 = 0,50
°С/Вт
= 0,50
°С/Вт
По графику функции  =f(t) определяется время перегрузки допустимое для тиристора Т132-50 [ ],
которое составляет
=f(t) определяется время перегрузки допустимое для тиристора Т132-50 [ ],
которое составляет  = 055с.
= 055с.
При известном максимальном допустимом времени перегрузки, определяем реальное время перегрузки по формуле
 (1.11)
(1.11)
где Jx- суммарный, приведенный момент инерции электропривода, кг-м2;
 -
номинальная угловая скорость двигателя,
-
номинальная угловая скорость двигателя,  ;
;
 -
пусковой момент двигателя, Н
-
пусковой момент двигателя, Н м.
Выбираем из =λ
м.
Выбираем из =λ
 ;
;
 -
статический момент, Нм.
Принимаем
-
статический момент, Нм.
Принимаем  =
= .
.
Выполним расчёт в соответствии с формулой (1.11)

Критерием нормальной работы СПП при перегрузке по току является выполнения условие
 (1.12)
(1.12)
где - максимально
допустимое время перегрузки, за которое температура перехода достигнет
максимально допустимого значения, с;
 -
требуемое (реальное) время перегрузки, с.
-
требуемое (реальное) время перегрузки, с.
Номинальная угловая скорость двигателя рассчитывается по формуле
 (1.13)
(1.13)
где  -номинальная
частота вращения, об/мин.
-номинальная
частота вращения, об/мин.
Выполним расчёт в соответствии с формулой (1.13)

Номинальный момент двигателя определяется по формуле
 (1.14)
(1.14)
Выполним расчёт в соответствии с формулой (1.14)

Проверим значения в соответствии с условием для тиристора Т132-50 (1.12)

Так как условие (1.15) выполняется, то считается, что прибор удовлетворяет условию при перегрузке по току для тиристора (Т132-50), является критерием нормальной работы СПП.
1.4Выбор СПП по напряжению
СПП должны выдерживать определенные напряжения, прикладываемые к ним как в прямом, так и в обратном направлениях. В полупроводниковом преобразователе СПП подвергаются воздействию рабочего напряжения и перенапряжений.
Рабочее импульсное напряжение (в преобразователях с естественной коммутацией синусоидальное) или рабочее постоянное напряжение (в преобразователях с искусственной коммутацией) определяется напряжением источника питания. Номинальное значение и допустимые отклонения этого напряжения известны и не могут быть произвольно изменены.
Перенапряжения разделяют на повторяющиеся и неповторяющиеся. Повторяющиеся перенапряжения определяются действием схемы преобразователя и возникают, например, при коммутации СПП. Неповторяющиеся перенапряжения определяются внешними по отношению к преобразователю причинами, например, срабатыванием коммутационной или защитной аппаратуры в схеме преобразователя или внешней цепи, а также грозовыми электрическими разрядами.
Величины перенапряжений в схеме зависят от параметров силовой цепи преобразователя и заранее неизвестны. Предвидимые перенапряжения, прикладываемые к СПП в схеме, могут быть уменьшены по величине с помощью устройств ограничения перенапряжений. Полное снятие перенапряжений в большинстве схем нецелесообразно, так как приводит к чрезмерному увеличению массы и габаритов устройств ограничения перенапряжений, а также потерь мощности в них. На практике выбирают СПП, имеющий запас классификационного значения напряжения по отношению к максимальному значению рабочего напряжения, прикладываемого к СПП в схеме. Уровень запаса выбирают из условий получения приемлемых массы и габаритов устройств ограничения перенапряжений и приемлемой мощности потерь в них. В качестве классификационного значения напряжения, приводимого в справочных материалах, принимают повторяющееся импульсное напряжение в закрытом состоянии Udrm. В, Udrmуказывается в справочных данных в обозначении вентилей соответствующей цифрой класса прибора по напряжению и равно числу сотен вольт.
Выбор СПП по напряжению осуществляется по формуле

 (1.15)
(1.15)
где  - повторяющееся импульсное напряжение в закрытом состоянии, В;
- повторяющееся импульсное напряжение в закрытом состоянии, В;
 - коэффициент
запаса по рабочему напряжению.
- коэффициент
запаса по рабочему напряжению. . Принимаем
. Принимаем  ;
;
 - максимальное значение рабочего напряжения, прикладываемого к СПП
в схеме, В.
- максимальное значение рабочего напряжения, прикладываемого к СПП
в схеме, В.
Максимальное значение напряжения, прикладываемого к тиристору в схеме определяется по формуле
Um = Umn Kсх
(1.16)
Kсх
(1.16)
где Umn - амплитуда напряжения вторичной обмотки трансформа- тора, В;
Kсх - коэффициент схемы, который для однофазной
мостовой схемы равен Kсх =
09
Выполним расчёт в соответствии с формулой (1.16)

Амплитуда напряжения вторичной обмотки трансформатора определяется по формуле
Umn = (1.17)
(1.17)
Выполним расчёт в соответствии с формулой (1.17)
Umn = 
Подставим значения в соответствии с формулой(1.15)
0,825
140 ≤ 1200
1155 1200
1200
По неравенству (1.15) выбирается тиристор Т132-40-2 класса по напряжению.
Далее производится окончательный выбор силовых СПП. Технические характеристики выбранного тиристора представлены в таблице 1.1.
Таблице 1.1- Параметры тиристора Т132-50
|
Название параметра |
Обозначение, размерность |
Значение параметра |
|
Повторяющееся импульсное напряжение в закрытом состоянии |
|
100-1200 |
|
Максимально допустимый средний ток в открытом состоянии |
|
50 |
|
Ударный неповторяющийся ток в открытом состоянии |
|
0,90 |
 , А
, А
Продолжение таблицы 1.1
|
Максимально допустимая температура перехода |
|
125 |
|
Пороговое напряжение |
|
1,03 |
|
Дифференциальное сопротивление в открытом состоянии |
|
4,6 |
|
Повторяющий импульсный ток в закрытом состоянии |
|
5 |
|
Тепловое сопротивление переход-корпуса |
|
0,5 |




 /Вт
/Вт2 Расчет и выбор элементов силовой части преобразователя и элементов защиты СПП
В случае, когда
напряжение на двигателе не соответствует напряжению питающей сети,
устанавливают силовой трансформатор. В случае, когда напряжение на двигателе
совпадает с напряжением питающей сети, устанавливают анодный реактор для защиты
от аварийных токов. По условию задания напряжение сети  = 110
В, значит необходим силовой трансформатор.
= 110
В, значит необходим силовой трансформатор.
2.1 Расчет и выбор силового трансформатора
В случае, когда напряжение на двигателе не соответствует напряжению питающей сети, устанавливают силовой трансформатор. В случае, когда напряжение на двигателе совпадает с напряжением питающей сети, устанавливают анодный реактор для защиты от аварийных токов.
Определим фазное напряжение вторичной обмотки трансформатора по формуле
 (2.1)
(2.1)
где  –
ЭДС вторичной обмотки трансформатора, В;
–
ЭДС вторичной обмотки трансформатора, В;
 –
коэффициент, учитывающий напряжения на активных сопротивлениях трансформатора,
падение напряжения на вентилях и падение напряжения из–за коммутации вентилей.
Принимаем
–
коэффициент, учитывающий напряжения на активных сопротивлениях трансформатора,
падение напряжения на вентилях и падение напряжения из–за коммутации вентилей.
Принимаем  =
1,05;
=
1,05;
 –
коэффициент, учитывающий неполное открывание вентилей. Принимаем
–
коэффициент, учитывающий неполное открывание вентилей. Принимаем  =
1,1.
=
1,1.
Подставляем числовые значения в формулу (2.1)

ЭДС вторичной обмотки трансформатора рассчитывается по формуле
 (2.2)
(2.2)
где  –
коэффициент схемы выпрямителя.
–
коэффициент схемы выпрямителя.
Подставляем числовые значение в формулу (2.2)
Мощность постоянных составляющих напряжения и тока выпрямителя рассчитывается по формуле
 (2.3)
(2.3)
Подставляем числовые значения в формулу (2.3)
Типовую мощность трансформатора  ,
определим по формуле
,
определим по формуле
 (2.4)
(2.4)
где  –
коэффициент, учитывающий превышение типовой мощности;
–
коэффициент, учитывающий превышение типовой мощности;
 - мощность постоянных составляющих напряжения и тока выпрямителя, Вт.
- мощность постоянных составляющих напряжения и тока выпрямителя, Вт.
Подставляем числовые значения в формулу (2.4)

Полную мощность трансформатора S, рассчитаем по формуле
 (2.5)
(2.5)
где  –
коэффициент не прямоугольности тока, учитывающий отклонение формы тока от
прямоугольной. Выбираем из
–
коэффициент не прямоугольности тока, учитывающий отклонение формы тока от
прямоугольной. Выбираем из 
Подставляем числовые значения в формулу (2.5)

По каталогу выбираем трансформатор по условию
 (2.6)
(2.6)
Подставляем числовые значения в условие (2.6)

Выбираем трансформатор TC - 6,3 / 0,66
Активное сопротивление фазы трансформатора рассчитаем по формуле
 (2.7)
(2.7)
где  –
потери короткого замыкания, Вт. Выбираем из
–
потери короткого замыкания, Вт. Выбираем из  =
(0,02
=
(0,02  0,035)
P;
0,035)
P;
m – колличество фаз вторичной обмотки трансформатора.
Подставляем числовые значения в формулу (2.7)

Номинальный ток фазы вторичной обмотки трансформатора определим по формуле
 (2.8)
(2.8)
Подставляем числовые значения в формулу (2.8)

Полное сопротивление короткого замыкания трансформатора определим по формуле
 (2.9)
(2.9)
где  -
относительное напряжение короткого замыкания трансформатора, %. Выбираем из
-
относительное напряжение короткого замыкания трансформатора, %. Выбираем из  =
4
=
4 ;
;
 –
номинальный ток фазы вторичной обмотки трансформатора, А.
–
номинальный ток фазы вторичной обмотки трансформатора, А.
Подставляем числовые значения в формулу (2.9)
Индуктивное сопротивление фазы трансформатора определим по формуле
 (2.10)
(2.10)
где  –
полное сопротивление фазы трансформатора, Ом.
–
полное сопротивление фазы трансформатора, Ом.
Подставляем числовые значения в формулу (2.10)

Таблица 2.2 - Параметры силового трансформатора TC - 6,3 / 0,66
|
Название параметра |
Обозначение, размерность |
Значение параметра |
|
Мощность |
P, кВт |
6,3 |
|
Номинальное напряжение |
|
220 |
 ,
В
,
В2.2 Расчёт и выбор сглаживающего дросселя
Пульсации выпрямленного тока увеличивают действующее значение тока якоря, увеличивают коэффициент формы тока Кф и вызывают, в связи с этим, повышенные тепловые потери. В связи с этим установленная мощность электродвигателя, соответствующая требуемому Мс, обусловленному гладкой составляющей тока двигателя, должна быть увеличена в % раз. Эти пульсации являются причиной пульсаций поперечного поля якоря и приводят к повышенным потерям на перемагничивание железа; ухудшают коммутацию двигателя, т.к. даже в установившемся режиме (di/dt = 0) пульсации поперечного поля тока якоря приводят к повышенному шуму при работе двигателя; являются причиной режима прерывистого тока, в котором электропривод имеет существенные нелинейности.
Для уменьшения пульсаций тока и ограничения зоны прерывистых токов в главной цепи двигателя применяют дополнительный сглаживающий дроссель. Однако, с целью экономии, стремятся обойтись без сглаживающего дросселя, применяя многофункциональные схемы выпрямления и двигатели, предназначенные для работы от вентильных преобразователей. При этом двигатели должны иметь достаточно большую индуктивность якоря (избегают применения компенсационных обмоток), для чего полюсы и статор в целом выполняются шихтованными.
Максимально возможное напряжение на выходе выпрямителя рассчитываем по формуле
Е0 = U2ф Kсх
(2.11)
Подставим числовые значения в формулу (2.11)
Е0
= 115,28 0,9
= 103,75 В
Индуктивность якорной цепи определяем по формуле
Lяц =  (1-
(1- (2.12)
(2.12)
где Е0 - максимально возможное напряжение на выходе выпрямителя, В;
 I гр.max - абсолютное наибольшее значение граничного тока, А. Выбираем
2.74;
I гр.max - абсолютное наибольшее значение граничного тока, А. Выбираем
2.74;
f - частота питающей сети, Гц;
mn – пульсность схемы.
Подставим числовые значения в формулу (2.12)
Lяц =  (1-
(1- 0) = 0,045 Гн
0) = 0,045 Гн
Число пар полюсов рассчитывается по формуле
 (2.13)
(2.13)
Выполним
расчёт в соответствии с формулой (2.13)
 =
2,67
=
2,67
Определим фазное напряжение вторичной обмотки
U2ф = E2 КсКRКа (2.14)
КсКRКа (2.14)
Подставим числовые значения в формулу (2.14)
U2ф = 1222211105 11 = 15528 В
Найдём ЭДС вторичной обмотки
Е2 = (2.15)
(2.15)
Подставим числовые значения в формулу (2.15)
Е2 =  = 12222 Вт
= 12222 Вт
Индуктивность двигателя определяем по формуле
Lдв = k  (2.16)
(2.16)
где k - коэффициент пропорциональности, учитывающий исполнение двигателя. Принимаем к = 0.6;
p – число пар полюсов.
Подставим числовые значения в формулу (2.16)
Lдв = 0,6 Гн
Гн
Проверка надобности дросселя определяется выражением
Lдв ≤ Lяц (2.17)
Подставим числовые значения в выражение (2.17)
0,0052  0,045
0,045
Т.к. условие (2.17) не выполняется, (индуктивность двигателя больше индуктивности якорной цепи) – сглаживающий дроссель не нужен.
2.3 Выбор коммутационной аппаратуры
Выбор коммутационной аппаратуры схемы управления производится по номинальному напряжению (или источника питания), номинальному току и не-обходимому количеству контактов. При выборе промежуточного реле учитывается количество замыкающих и размыкающих контактов. При выборе кнопок учитывается их исполнение и цвет.
2.4 Расчёт элементов защиты
Переходные процессы в цепях преобразователя электрической энергии часто сопровождается перенапряжениями, основными их которых являются перенапряжения, обусловленные внутренними процессами в полупроводниковых приборах в моменты коммутации тока; коммутационные перенапряжения возникающие в моменты отключения внешних цепей с индуктивностями перенапряжения, вызванные резонансными явлениями в преобразователях; внешние перенапряжения, поступающие из питающей сети. Перенапряжения могут привести к электрическому пробою приборов, вызывающему, как правило, возникновением коротких замыканий.
Защитные RC-цепи предназначены для ограничения скорости нарастания напряжения и снижения перенапряжений на вентилях схемы. Для защиты СПП от аварийных токов используют анодные реакторы, которые ограничивают ток короткого замыкания на уровне, не превышающем ударный ток Iуд прибора.
Точный расчёт RC-цепей достаточно сложен и требует учёта ряда факторов применения вычислительной техники. Параметры RC-цепи определяется компромиссным решением с учётом достаточного ограничения уровня напряжения разрядного тока защищенного конденсатора в момент включения вентиля при максимальном угле регулирования.
Параметры RC-цепей, защищающий полупроводниковые приборы о внутренних перенапряжений, можно определить ориентировочно.
Емкость конденсатора С,Ф определяется по формуле
С (2.18)
(2.18)
где -
максимальный обратный ток тиристоров, А;
-
максимальный обратный ток тиристоров, А;
 -
максимальный ток через тиристор в прямом направлении, А;
-
максимальный ток через тиристор в прямом направлении, А;
 - максимальное
обратное напряжение, прикладываемое к тиристору в схеме, В.
- максимальное
обратное напряжение, прикладываемое к тиристору в схеме, В.
Подставим числовые значения в формулу (2.18)
С 0001
пФ
0001
пФ
Сопротивление резистора R,Ом RC-цепи определяется по формуле
R =  (2.19)
(2.19)
Подставим числовые значения в формулу (2.19)
R =  = 200
кОм
= 200
кОм
Мощность резистора Р, Вт RC-цепи
определяется по формуле
Р =  ∙
∙
 (2.20)
(2.20)
Подставим числовые значения в формулу (2.20)
Р = 1200 0006
= 72 Вт
0006
= 72 Вт
Исходя из значений ёмкости защитных конденсаторов и значений
Сопротивления и мощности резисторов, выбираются RC-цепи.
3 Проектирование функциональной схемы СИФУ
На рисунке 3.1 представлена функциональная схема СИФУ
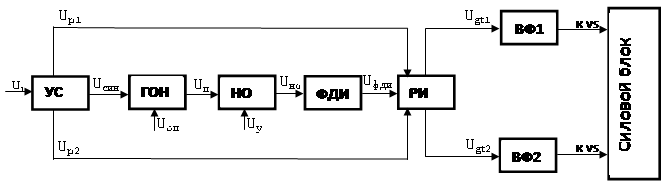
Рисунок 3.1- Функциональная схема СИФУ
УС - устройство синхронизации; обеспечивает гальваническую развязку СУ с питающей сетью, отмечает переходы через 0 сетевого напряжения, а так же формирует на своем выходе разрешающие сигналы Up1 и Up2, которые используются для управления тиристорами;
ГОН - генератор опорного напряжения; формирует пилообразное напряжение Uп, возвращаясь в исходное состояние в момент подачи импульсов Uсинх;
НО - нулевой орган; сравнивает пилообразное Uп и напряжение управления Uу и в момент равенства меняет свое выходное состояние;
ФДИ - формирователь длительности импульсов; по «рабочему» фронту сигнала Uно формирует прямоугольные импульсы с длительностью, достаточной для надежного открывания тиристоров силового блока;
РИ - распределитель импульсов; управляется сигналами Up1 и Up2 с выхода УС и служит для распределения импульсов Ugt по тиристорам;
ВФ1, ВФ2 - выходные формирователи; формируют
открывающие импульсы по мощности, необходимой для надежного включения
тиристоров, и обеспечивают потенциальную развязку СУ с силовым блоком;
U1- напряжение сети, вырабатывает разрешающие сигналы Uр1 и Uр2 , соответствующие положительным и отрицательным полупериудом сетевого U.Он формирует последовательность импульсов строго синхронизируемых (Uсин ) в момент естественного открывания тиристоров(точка перехода U1 через ноль).
СИФУ предназначена для вырабатывания управляющих импульсов, которые подаются на управляющие электроды тиристоров в нужные моменты времени синхронно с сетевым напряжением. В зависимости от величины напряжения на входе СИФУ UВХ управляющие импульсы могут сдвигаться по фазе относительно сетевого напряжения, создавая тот или иной угол открывания тиристоров α и регулируя тем самым среднее напряжение на нагрузке.
СИФУ относится к преобразовательной технике и может быть использовано для управления тиристорными регуляторами напряжения при пуске асинхронного электропривода. Техническим результатом является повышение точности и надежности работы. Система импульсно-фазового управления содержит источник сигнала синхронизации, два релейных элемента, сумматор, интегратор, формирователь импульсов управления, источник сигнала управления, стабилизатор напряжения, интегратор и источник трехфазного напряжения. В систему импульсно-фазового управления включены первый выпрямитель и первый усилитель-ограничитель и последовательно включенные второй выпрямитель и второй усилитель-ограничитель. Входы выпрямителей соединены с источником трехфазного напряжения, а выходы усилителей ограничителей подключены к клеммам электропитания первого релейного элемента. Клеммы электропитания усилителей-ограничителей соединены с выходом стабилизатора напряжения.
Требования к СИФУ заключаются в обеспечении необходимого диапазона изменения углов а, формировании отпирающих тиристоры импульсов и обеспечении достаточной симметрии углов включения тиристоров в различных фазах. Кроме того, СИФУ должна быть устойчивой к помехам для обеспечения стабильной работы и вместе с тем достаточно быстродействующей для обеспечения заданных динамических режимов.
Одним из наиболее эффективных способов повышения статической и динамической точности систем импульсно-фазового управления (СИФУ) вентильными преобразователями (ВП), а также их помехоустойчивости являются методы интегрирующего развертывающего преобразования.
В зависимости от числа фаз напряжения сети и конфигурации силовой схемы вентильного преобразователя СИФУ подразделяются на однофазные и многофазные. К первой группе относятся СИФУ, управляющие работой, например, однополупериодным или двухполупериодным мостовым выпрямителем. СИФУ, входящие в состав ВП, где силовой блок выполнен, например, по трехфазной мостовой или трехфазной схеме с нулевым выводом относятся к разряду многофазных.
По характеру взаимодействия СИФУ с напряжением сети различают многоканальные и одноканальные синхронные, а также асинхронные системы импульсно-фазового управления.
4. Расчёт и выбор элементов СИФУ
4.1 Проектирование устройства синхронизации
Принципиальная схема устройства синхронизации приведена на рисунке 4.1
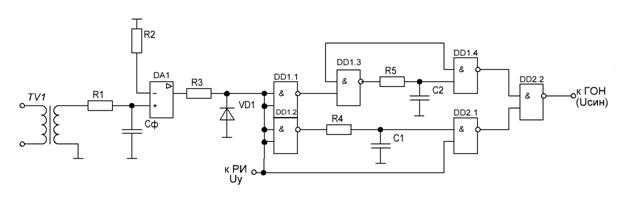
Трансформатор TV1 необходим для согласования напряжения питающей сети с напряжением питания схемы управления, а также для осуществления потенциальной развязки цепи схемы управления с силовым цепями. Считая напряжение в схеме управления равным 10В, можно изготовить трансформатор, имеющий следующие параметры:
- = 220, В;
= 220, В;
- =15, В;
=15, В;
- S = 10, В·А.
Сначала
выбираем цифровые и аналоговые схемы, для реализации схемы СИФУ. Выбираем ОУ по
параметру питания схемы управления СИФУ,  = 15 В. Из [ ] выбираем ОУ марки К140УД8В
с параметрами представленными в таблице 4.1. Так же нам необходимо выбрать микросхему, реализующие логическую
операцию И-НЕ. Из [ ] выбираем микросхему К155ЛА10 с параметрами
представленными в таблицах 4.2 .
= 15 В. Из [ ] выбираем ОУ марки К140УД8В
с параметрами представленными в таблице 4.1. Так же нам необходимо выбрать микросхему, реализующие логическую
операцию И-НЕ. Из [ ] выбираем микросхему К155ЛА10 с параметрами
представленными в таблицах 4.2 .
Таблица 4.1 - Параметры операционного усилителя К140УД8В
|
Название параметра |
Обозначение, размерность |
Значение параметра |
|
Выходной ток |
Iвых,мА |
5 |
|
Входной ток |
Iвх,нА |
0,2 |
|
Входной сопротивление |
Rвх,кОм |
200 |
|
Напряжение смещения |
Uсм,мВ |
150 |
Таблице 4.2 - Параметры микросхемы К155ЛА10
|
Название параметра |
Обозначение, размерность |
Значение параметра |
|
Напряжение питания |
Uпит,В |
5 |
|
Напряжение на выходе закрытой схемы |
Uвых,В |
2 |
|
Выходной ток |
Iвх,мА |
0 |
 4
4Далее выбираются остальные элементы для принципиальной схемы УС. Исходя из условия ограничения входного тока операционного усилителя DА1, определяется сопротивление резистора R1, Ом по формуле
 (4.1)
(4.1)
где  - входное напряжение операционного
усилителя, равное фазному напряжению вторичной обмотки трансформатора,
- входное напряжение операционного
усилителя, равное фазному напряжению вторичной обмотки трансформатора,  =15В;
=15В;
 - входной ток операционного усилителя, А. [ ]
- входной ток операционного усилителя, А. [ ]
Подставим значения в формулу (4.1)
R1 =  = 75 кОм
= 75 кОм
Исходя из условия ограничения логических элементов, рассчитываете сопротивление R3 по формуле (4.1).
R3 =  = 0,37 МОм
= 0,37 МОм
Диод VD1 необходим для отсечки отрицательной полуволны прямоугольного напряжения, поступающего на логические элементы. Он должен соответствовать выбранному операционному усилителю К140УД8В . Выбираем диод Д231. Параметры диода представлены в таблице 4.3
Таблице 4.3 - Параметры диода Д231
|
Название параметра |
Обозначение, размерность |
Значение параметра |
|
Максимальное обратное напряжение |
Uобр,В |
300 |
|
Номинальный прямой ток |
Iпр,А |
10 |
Продолжение таблицы 4.3
|
Рабочая частота диода |
fд,кГц |
1,1 |
|
Постоянный обратный ток |
Iобр, мкА |
3000 |
|
Постоянное прямое напряжение |
Uпр, В |
1 |
Принимаем ширину импульса напряжения (т.е. период) синхронизации равным 10 мкс, тогда задаемся емкостью конденсатора равна 1мкФ следовательно, определяем сопротивление для RC-цепей по формуле
R =  (4.2)
(4.2)
Подставим значения в формулу (4.2)
R =  =
10 Ом
=
10 Ом
Выбираем
резистор: R1- МЛТ 0 125 - 75 МОм ±
10%
125 - 75 МОм ±
10%
4.2 Проектирование генератора опорного напряжения
Принципиальная схема ГОН приведена на рисунке 4.2, в соответствии с этой схемой выбираются элементы, составляющие ГОН и определяется порядок работы схемы.
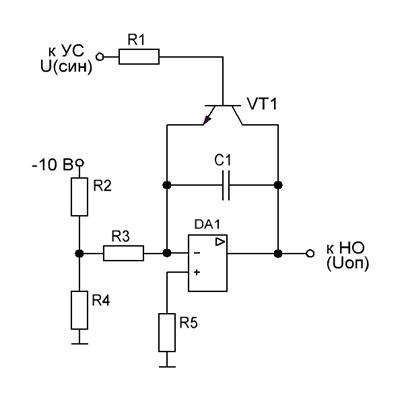
Рисунок 4.2 - Схема электрическая принципиальная
В качестве операционного усилителя берется усилитель, выбранный ранее. Выбирается транзистор КТ209Г, напряжение, на базе которого должно, быть больше или равно напряжению высокого уровня на выходе логических элементов. Но лучше выбирать транзистор с запасом по напряжению. Исходя из параметров, выбранного транзистора можно рассчитать R1 из выражения
R1=  (4.3)
(4.3)
где  - входное напряжение на базе транзистора, В;
- входное напряжение на базе транзистора, В;
 - входной ток операционного усилителя, А.
- входной ток операционного усилителя, А.
Подставим значения в формулу (4.3)
R1=  = 150 Ом
= 150 Ом
Резисторы R2 и R4 выбираются, исходя из
величины опорного напряжения, так как с общей точки этих резисторов снимается
максимальное значение опорного напряжения  .
.
Сопротивление R5 выбирается, исходя из схемы подключения операционного усилителя DA1.
4.3 Проектирование нуль - органа
Принципиальная схема нуль - органа приведена на
рисунке 4.3, в соответствии с этой схемой выбираются элементы, составляющие
нуль-орган.
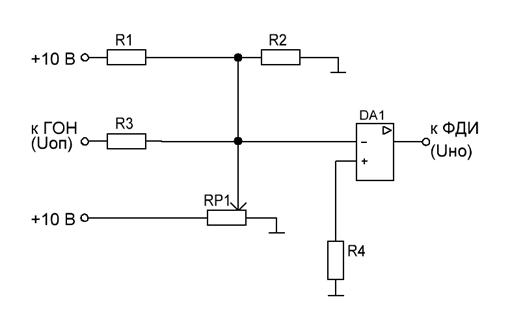
Рисунок 4.3 - Схема электрическая принципиальная нуль - органа.
Чтобы рассчитать сопротивления резисторов R1 и R2 необходимо знать величину напряжения смещения. Напряжение смещения выбирается таким образом, чтобы при напряжении управления равном нулю, угол открывания вентилей, а был равен начальному углу открывания αнач, то есть соответствующему максимально возможному углу открывания в режиме непрерывного тока. Нулевой потенциал в общей точке возможен при условии
Uу+Uсм+Uоп=0 (4.4)
Принимаем Ucm =10В. Поскольку напряжения смещения попадает на вход операционного усилителя без ограничения тока, то общий ток через резисторы R1 и R2 не должен превышать входной ток операционного усилителя, а следовательно, общее сопротивление этих резисторов можно определить по формуле
R1=R2=  (4.5)
(4.5)
где Uп - напряжение питания схемы, В.
Подставим значения в формулу (4.5)
R1 = R2 =  = 125 кОм
= 125 кОм
Аналогично, по формуле (4.5) определятся сопротивление переменного резистора RP1. Резистор R3 ограничивает входной ток операционного усилителя по цепи ГОН. Зная максимальное напряжение на выходе ГОН, можно определить сопротивление этого, резистора по формуле
R3 =  (4.6)
(4.6)
Подставим значения в формулу (4.6)
R3 =  = 75 кОм
= 75 кОм
Исходя из схемы подключения операционного усилителя, выбирается резистор R4.
4.4 Проектирование формирователя длительности импульсов
Принципиальная схема формирователя длительности импульсов приведена на рисунке 4.4, в соответствии с этой схемой производится расчет и выбор элементов формирователя длительности импульсов
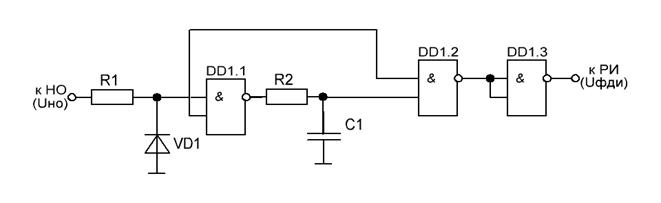
Рисунок 4.4 - Схема электрическая принципиальная формирователя длительности импульсов.
Для реализации логических элементов берется ранее выбранная микросхема. Резистор R1 ограничивает входной ток логического элемента на допустимом уровне, его сопротивление определяется по формуле
R1 =  (4.7)
(4.7)
Подставим значения в формулу (4.6)
R1 =  = 1,2
МОм
= 1,2
МОм
Диод VD1 необходим для отсечки отрицательной полуволны прямоугольного напряжения, поступающего на логические элементы. Выбирается диод, имеющий максимальное; обратное напряжение и номинальный прямой ток.
4.5 Проектирование распределителя импульсов
Принципиальная схема распределителя импульсов приведена на рисунке 4.5,в соответствии с этой схемой производится выбор элементов составляющих схему.
Для реализации логических элементов берётся выбранная микросхема.
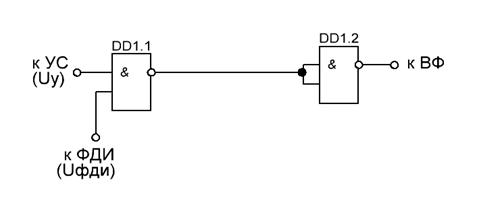
Рисунок 4.5 - Схема электрическая принципиальная распределителя импульсов
4.6 Проектирование выходного формирователя
Принципиальная схема выходного формирователя приведена на рисунке 4.6, в соответствии с этой схемой производится расчет и выбор элементов выходного формирователя.
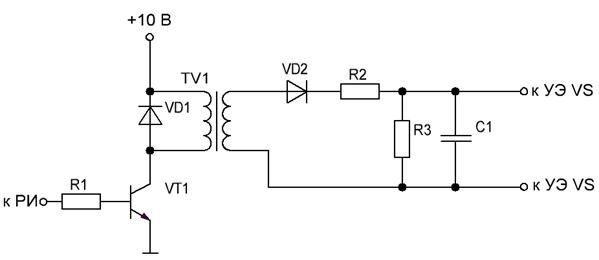
Рисунок 4.6 - Схема электрическая принципиальная выходного формирователя.
Транзистор n-р-n типа выбирается с необходимыми параметрами.
Резистор R1 ограничивает ток базы на допустимом уровне. Его сопротивление определяется на основе максимально возможного напряжения на базе транзистора по формуле (4.3).
R1=  = 3
= 3 7 кОм
7 кОм
Диод VD1 препятствует появлению напряжения обратной полярности на переходе коллектор-эмиттер транзистора. Диод VD2 предназначен для того, чтобы не допустить появление обратной полярности на управляющем электроде тиристора. Эти диоды выбираются с максимально обратным напряжением и номинальным прямым током.
Резистор R2 ограничивает ток управляющего электрода тиристора на допустимом уровне, его сопротивление определяется, исходя из максимально возможного значения напряжения в цепи управляющего электрода по формуле
R2 =  (4.8)
(4.8)
где UУЭ - напряжение в цепи управляющего электрода тиристора, В;
IУЭ - максимальный ток управляющего электрода тиристора, А.
Подставим значение в формулу (4.8)
R2 =  = 4 кОм
= 4 кОм
Резистор R3 и конденсатор C1 представляет собой RC – фильтр.
 (zip - application/zip)
(zip - application/zip)









