












АВТОНОМНАЯ НЕКОММЕРЧЕСКАЯ ОБРАЗОВАТЕЛЬНАЯ ОРГАНИЗАЦИЯ
ВЫСШЕГО ЦЕНТРОСОЮЗА РОССИЙСКОЙ ФЕДЕРАЦИИ
«РОССИЙСКИЙ УНИВЕРСИТЕТ КООПЕРАЦИИ»
СМОЛЕНСКИЙ ФИЛИАЛ
Кафедра гуманитарных и естественнонаучных дисциплин
КУРСОВАЯ РАБОТА
по дисциплине:"Основы электротехники".
на тему:"Векторная диаграмма асинхронного двигателя.
Электрические цепи постоянного и переменного тока".
Вариант №25
Работу выполнил:
студент 3 курса
группы
ИСТ(БИС)1-ОЗ/Бс/Смол13
Попков А.А.
Преподаватель:
профессор Курилин С.П.
Смоленск, 2016 г.
Введение.
Электродвигатель – это основной компонент различных видов промышленного оборудования. Каждый электродвигатель имеет конкретное условное обозначение. Оно формулируется в зависимости от таких параметров, как серия, вид, высота оси вращения, длина сердечника статора, установочный размер по длине станины, климатическое исполнение, число полюсов, исполнение двигателя по способу защиты от окружающей среды, категория размещения при эксплуатации, конструктивное исполнение, режим работы.
Каждый производитель рано или поздно задаётся вопросом, какой именно двигатель ему предпочесть. Сегодня на рынке представлен большой ассортимент асинхронных двигателей. Многие отдают предпочтение именно им. В чём их особенности, достоинства и недостатки мы рассмотрим в это в моей курсовой работе.
1.Векторная диаграмма асинхронного двигателя
1.1.Область применения асинхронных двигателей.
Асинхронный двигатель — это асинхронное устройство, предназначенное для преобразования с минимальными потерями электрической энергии переменного тока в механическую энергию, необходимую для запуска работающих на этом двигателе приборов.
Асинхронные двигатели нашли очень широкое применение в различных отраслях промышленности и сельского хозяйства. Их используют в электроприводе металлорежущих станков, подъёмно-транспортных машин, транспортёров, насосов, вентиляторов. Маломощные двигатели используются в устройствах автоматики.
Широкое применение асинхронных двигателей объясняется их достоинствами по сравнению с другими двигателями: высокая надёжность, возможность работы непосредственно от сети переменного тока, простота обслуживания.
1.2. Устройство и принцип работы асинхронного двигателя. Любой электродвигатель, независимо от мощности и габаритов, состоит из следующих элементов:
- Статор;
- Ротор;
- Корпус;
Статор — является неподвижной частью асинхронного двигателя. Он состоит из станины и магнитопровода. Магнитопровод запрессовывается в станину двигателя и образует электромагнитное ядро статор. Ядро осуществляет намагничивание машины и создает вращающееся магнитное поля.
Ротор — это подвижный узел мотора, отвечающий за преобразование одной энергии в другую, посредством вращения ротора вокруг своей оси.
Корпус — защищает статор и ротор от механических повреждений и служит для крепления в нем подвижной и неподвижной части асинхронного двигателя.
Принцип работы асинхронного двигателя основан на электромагнитном законе Фарадея. Вращается он благодаря воздействию электродвижущей силы, возникающей в результате взаимодействия магнитных потоков и обмотки ротора — между статором, ротором и их обмотками существует некий зазор, сквозь который проходит вращающийся магнитный поток. В результате этого в проводниках ротора возникает напряжение, которое и является причиной образования ЭДС.
1.3.Векторная диаграмма асинхронного двигателя.
Электромеханическое преобразование энергии может происходить в асинхронном двигателе в следующих трех режимах:
- в режиме двигателя.
- в режиме генератора.
- в режиме тормоза.
Для определения режимов и характеристик работы асинхронного двигателя используют аналитический и графический методы. Графический метод решения основан на построении векторных диаграмм. Он является более наглядным и часто используется для качественного анализа различных режимов работы.
Векторная диаграмма - это изображение синусоидально изменяющихся величин в виде векторов на плоскости.
В режиме двигателя под воздействием электромагнитного момента , направленного в сторону поля, ротор машины вращается в сторону поля со скоростью, меньшей, чем скорость поля .
Электрическая мощность преобразуется в механическую мощность, передаваемую через вал приводимой в движение машины.
Энергетические процессы в режиме двигателя иллюстрируются рис. 3.1, а, на котором направление активной составляющей тока ротора совпадает с индуктированной в роторе ЭДС. Направление электромагнитного момента определяется электромагнитной силой , действующей на ток.
Полезная механическая мощность оказывается меньше потребляемой из сети мощности на потери .
В режиме генератора под воздействием внешнего момента , направленного в сторону поля, ротор машины вращается со скоростью, превышающей скорость поля. В этом режиме в связи с изменением направления вращения поля относительно ротора ,активная составляющая тока ротора, изменяет свое направление на обратное (по сравнению с двигательным режимом). Поэтому электромагнитный момент, уравновешивающий внешний момент, направлен против поля и считается отрицательным.
Для построения векторной диаграммы асинхронного двигателя необходимо чтобы параметры цепи ротора были приведены к цепи статора. Это достигается заменой числа витков одной фазной обмотки w2, с числом фаз m2 и обмоточным коэффициентом kоб2 на w1, m1, kоб1.
Энергетические параметры должны быть пересчитаны правильно, для того чтобы сохранить энергетические соотношения в двигателе.
ЭДС приведенной вторичной обмотки
Коэффициент трансформации токов
Отсюда приведенный ток вторичной обмотки

В асинхронном двигателе с короткозамкнутым ротором числа фаз m1 и m2 не равны, потому что каждый стержень короткозамкнутой обмотки рассматривается как отдельная фаза, число витков такой обмотки w2=0.5, а число фаз равно числу стержней m2=Z2. Обмоточный коэффициент для такой обмотки kоб2=1.
Активное и индуктивное сопротивления вторичной обмотки
Угол сдвига фаз между E2’ и I2’
Уравнения токов, напряжений статора и ротора
На основании этих уравнений выполняется построение векторной диаграммы асинхронного двигателя.

Рисунок 1 - Векторная диаграмма асинхронного двигателя.
Построение векторной диаграммы (рисунок 1) начинается с вектора основного магнитного потока Ф. Затем откладываются вектора E2’ и E1, которые отстают от вектора Ф на 90⁰. Затем зная угол сдвига фаз ψ2 между I2’ и E2’, строят вектор I2’. Вектор I0 опережает Ф на угол δ, а вектор I1 находят как векторную сумму I0 и -I2’. Вектор U1 строим, добавляя к вектору –E1 падение напряжения I1r1 параллельно вектору I1, затем откладываем jI1x1 и получаем вектор I1Z1, который складываем с –E1 и в итоге получаем U1.
Так как асинхронный двигатель в данном случае можно рассматривать как трансформатор, работающий на активную нагрузку, то вектор –I2’r2’(1-s)/s откладываем под тем же углом, что и I2", затем прибавляем к нему –I2’r2’ и –jI2’x2, получаем вектор –I2’Z2.
1.4. Выводы. Асинхронные двигателиполучили большую популярность благодаря своей универсальности, позволяющей использовать их во многих отраслях. Однако эти механизмы, как и любые другие устройства, имеют свои достоинства и недостатки. Достоинства асинхронных двигателей переменного тока:
- простая конструкция двигателя;
- дешевая себестоимость приборов;
- высокие эксплуатационные характеристики;
- простое управление конструкцией;
- возможность работы в тяжелых условиях.
Высокая производительность асинхронных двигателей переменного тока достигается благодаря высокой мощности, потери которой минимизированы благодаря отсутствию трения в процессе их работы.
К недостаткам асинхронных двигателей можно отнести:
- потеря мощности при изменении скорости.
- снижение крутящего момента при увеличении нагрузки.
- низкая мощность в момент запуска.
2. Основные законы и методы анализа электрических цепей переменного тока.
2.1. Расчет простой электрической цепи постоянного тока.
Для
электрической цепи постоянного тока (рисунок 2) определить ток I,
напряжение на зажимах нагрузки U,
мощность нагрузки Р2, мощность источника питания Р1, КПД, где Е=24В,  =0.4
Ом,
=0.4
Ом,  =6
Ом,
=6
Ом,  =7
Ом,
=7
Ом,  =3
Ом и замкнутый ключ К1.
=3
Ом и замкнутый ключ К1.
Рисунок 2 - схема электрической цепи постоянного тока.
Решение:
Проведем
эквивалентное преобразование электрической схемы согласно приведенным
параметрам цепи, и получим, что замкнутый ключ К1 и образуют
контур с нулевым сопротивлением, исходя из этого, сопротивлением можно
пренебречь. Тогда получим электрическую схему постоянного тока следующего вида,
показанном на рисунке 3.

Рисунок 3 - Эквивалентная схема цепи постоянного тока.
Найдем
сопротивление участка цепи , .
.
Формула последовательного соединения сопротивления:

Формула параллельного соединения двух сопротивлений:
Отсюда сопротивление участка цепи R2,R3 равно
 =
= =
= =
2.1
Ом
=
2.1
Ом
По закону Ома ток в цепи равен:
I= =
=
 =
9,6 А
=
9,6 А
Напряжение на нагрузке:
U= 2.1*9,6=
20.16 В
2.1*9,6=
20.16 В
Мощность источника питания:
 24*9,6=230.4
Вт
24*9,6=230.4
Вт
Мощность нагрузки:
 =
20.16*9,6
=
20.16*9,6 193.53
Вт
193.53
Вт
КПД:
 100
= 84%
100
= 84%
2.2. Расчет сложной электрической цепи методом эквивалентных преобразований.
Определить
эквивалентное сопротивление  и
распределение токов по ветвям электрической цепи постоянного тока (рисунок 5),
где Е=24 В,
и
распределение токов по ветвям электрической цепи постоянного тока (рисунок 5),
где Е=24 В,  =1,
=1, =1,
=1,
 =4,
=4,
 =2,
=2,
 =3,
=3,
 =4,
=4,
 =4,
=4,
 =2,
=2,
 =1,
=1,
 =6,
=6,
 =1,
=1,
 =1,
=1,
 ,
,
 -
разомкнуты. Участок цепи согласно варианту- г (рисунок 4).
-
разомкнуты. Участок цепи согласно варианту- г (рисунок 4).

Рисунок 4 - Участок цепи согласно варианту.
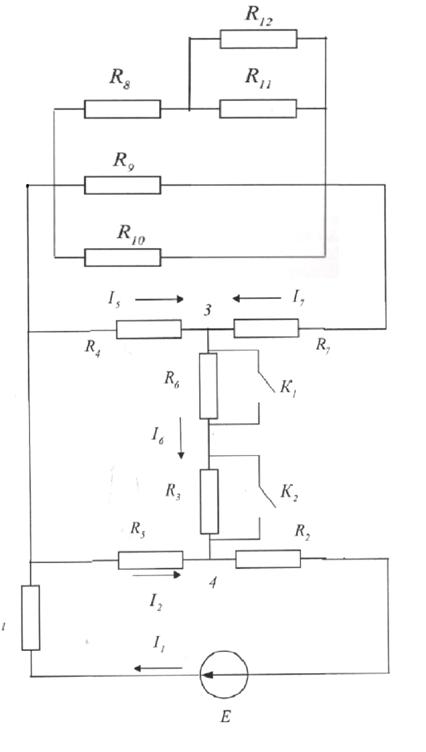
Рисунок 5 - Расчетная электрическая цепь постоянного тока
.
Решение:
Произведем промежуточные вычисления сопротивлений:

 0.5+2=2.5
Ом
0.5+2=2.5
Ом

 Ом
Ом
 =0.64+4=4.64
Ом
=0.64+4=4.64
Ом
 =
= =
=
 =
= =1.39
Ом
=1.39
Ом
 =
= =4+4=8
Ом
=4+4=8
Ом
 =8+1.39=9.39
Ом
=8+1.39=9.39
Ом
Упростим схему, исходя из выше сделанных расчетов:
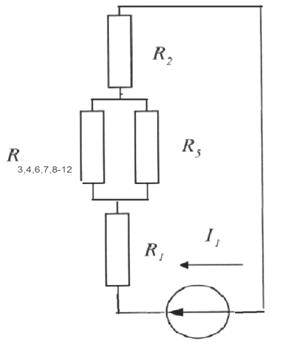
Рисунок 6 - Упрощенная эквивалентная схема цепи.
.
 =
= =
= =
2.27
Ом
=
2.27
Ом
= =1+1+2.27=4.27
Ом
=1+1+2.27=4.27
Ом
2.3. Расчет электрической цепи по законам Кирхгофа.
Определить токи
в ветвях и составить баланс мощностей, где  ,
,
 ,
,
 ,
,
 ,
,
 ,
=1,=1,
=1,
=1,
=4,
=4,
=2,
=1,
=6,
замкнутые ключи - 1,2,3(рисунок 7).
,
=1,=1,
=1,
=1,
=4,
=4,
=2,
=1,
=6,
замкнутые ключи - 1,2,3(рисунок 7).
Рисунок 7 - Схема электрической цепи.
Решение:
Преобразуем электрическую цепь согласно варианту и обозначим на ней направления токов и направления обхода (рисунок 8).
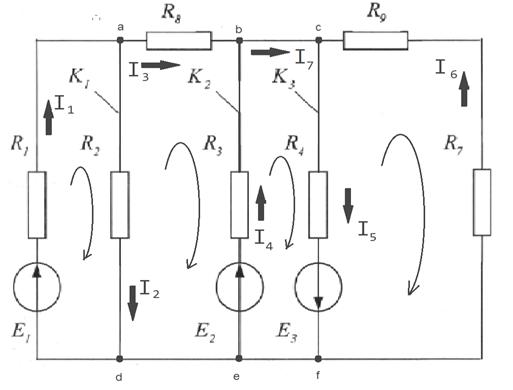
Рисунок 8 - Расчетная схема электрической цепи.
Исходя из схемы, приведенной на рисунке 8, составим четыре уравнения по второму закону Кирхгофа:




Составим уравнение по первому закону Кирхгофа для узла a:

Составим уравнение по первому закону Кирхгофа для узла b:

Составим уравнение по первому закону Кирхгофа для узла c:

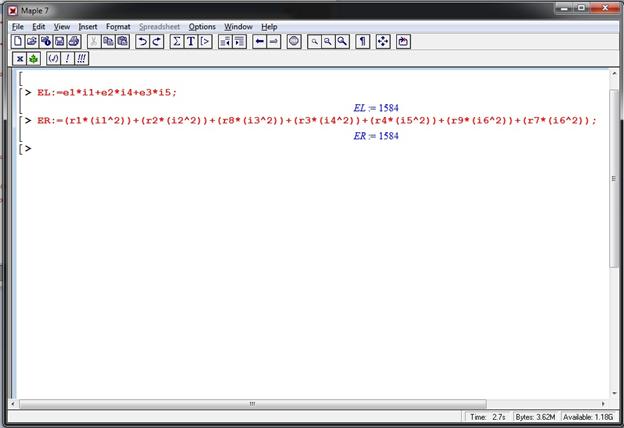
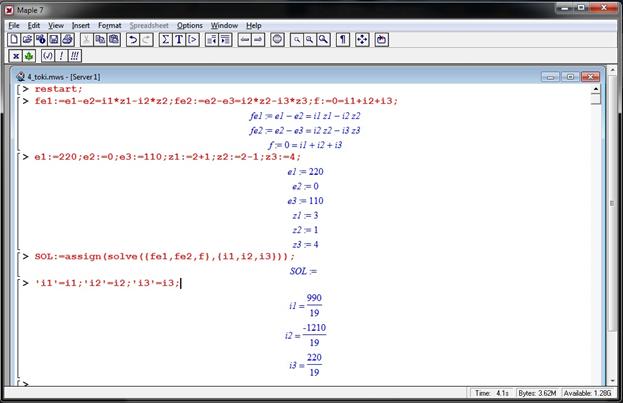
Решая уравнения в среде компьютерной математики Maple 7(см. приложение Б), находим значения токов:
 .
.
Полученные значения проверим по равенству:

Для достоверности пересчета выполним вычисления в среде Maple 7 (см. приложение Б) и получим:
1584=1584
Значит вычисления верны.
Определим мощность источников энергии:

Мощность потребителей энергии:
 Вт
Вт
Баланс мощностей выполняется с погрешностью:

которую следует считать допустимой.
2.4. Выводы.
Исходя и произведенных вычислений, мы убеждаемся, что законы Кирхгофа и методы эквивалентных преобразований, очень удобны для применения на практике, что существенно упрощает расчеты токов и сопротивлений электрических цепей постоянного тока.
Методы эквивалентных преобразований не только упрощают расчеты, но и также наглядное представление схемы, что делает ее более понятной и менее объемной.
После анализа схемы и составления уравнений согласно первому и второму закону Кирхгофа, мы получаем целую систему уравнений, которую не составляет труда решить с использованием математических методов или пакетов прикладных программ, например таких как Maple.
3.Основные законы и методы анализа электрических цепей переменного тока.
3.1.
Расчет электрической цепи переменного тока по законам Кирхгофа. Для
электрической цепи по рисунку 9 определить полные сопротивления ветвей, токи в
ветвях, напряжения между точками "0" и "1", "0" и
"2", где 
Решение:
Вычисляем полные (комплексные) сопротивления :



По законам Кирхгофа составляем уравнения цепи :



Подстановка числовых значений ЭДС и полных сопротивлений и решение полученных уравнений в среде Maple 7(см. приложение Б), дает действующие значения токов:
 A,
A,
 A,
A,
 A,
A,
Напряжение между точками "0" и "1":
 =j220-j52.105*1=j167.895
В,
=j220-j52.105*1=j167.895
В, 
Напряжение между точками "0" и "2":
 =j220-52.105*(1+2j)=52.105+j167.895
В,
=j220-52.105*(1+2j)=52.105+j167.895
В,
 175,794
В.
175,794
В.
3.2. Выводы.
Исходя из рассчитанных показателей, вольтметр, включенный между точками "0" и "2",покажет приблизительно напряжение 176 вольт.
Заключение.
В ходе выполнения курсовой работы было изучено строение и принципы работы асинхронного двигателя, конструктивные особенности и характеристики. Был изучен метод построения векторных диаграмм для асинхронных двигателей, произведены расчеты витков статора и ротора, коэффициенты трансформации тока, индуктивные сопротивления, напряжения на статоре и роторе. Рассмотрены достоинства и недостатки асинхронных двигателей.
Также были изучены законы Кирхгофа, методы эквивалентных преобразований, проведены расчеты цепей переменного тока на основе закона Кирхгофа.
Список используемых источников.
1. Волынский В.А. и др. Электротехника /Б.А. Волынский, Е.Н. Зейн, В.Е. Шатерников: Учеб. пособие для вузов. – М.: Энергоатомиздат, 2007.
2. Расчет электронных схем. Примеры и задачи. Учеб. пособие для вузов по спец. электрон. техники /Г.И. Изъюрова, Г.В. Королев, В.А. Терехов и др. – М.: Высш. шк., 1987.
3. Основы промышленной электроники: Учебник для неэлектротехн. спец. вузов /В.Г. Герасимов, О М. Князьков, А Е. Краснопольский, В.В. Сухоруков; под ред. В.Г. Герасимова. – 3-е изд., перераб. и доп. – М.: Высш. шк., 2006. – 336 с., ил.
4. Бессонов Л.А. Сборник задач по ТОЭ. М.: Высш. шк., 2001.
5. Жаворонков М.А. Электротехника и электроника. – М. «Академия»,
Ермуратский П.В., Косякии А.А., Листвин В.С., Лычкина Г.П.,
Нетушил А.В. Справочное пособие по электротехнике и основам электроники : Учебное пособие для неэлектротехнических специальностей вузов. Москва, Издательство «Высшая школа», 2006.
Приложение А.
Приложение Б.
|
|
|
|
|
|

Содержание.
Оглавление
Введение. 2
1.Векторная диаграмма асинхронного двигателя. 3
1.1.Область применения асинхронных двигателей. 3
1.2. Устройство и принцип работы асинхронного двигателя. 3
1.3.Векторная диаграмма асинхронного двигателя. 4
1.4. Выводы. 7
2. Основные законы и методы анализа электрических цепей переменного тока. 8
2.1. Расчет простой электрической цепи постоянного тока. 8
2.2. Расчет сложной электрической цепи методом эквивалентных преобразований. 10
2.3. Расчет электрической цепи по законам Кирхгофа. 13
2.4. Выводы. 15
3.Основные законы и методы анализа электрических цепей переменного тока. 16
3.1. Расчет электрической цепи переменного тока по законам Кирхгофа. 16
3.2. Выводы. 17
Заключение. 18
Список используемых источников. 19
Приложение А. 20
Приложение Б. 21
Содержание. 22
 (zip - application/zip)
(zip - application/zip)









