











РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ
ГИДРОМЕТЕОРОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра экспериментальной физики атмосферы
РЕФЕРАТ
по дисциплине
“Методы и средства гидрометеорологических измерений”
На тему: Устройство и принцип работы РЛС «МЕТЕОРИТ» и радиозонда «МАРЗ – 2»
Выполнила:
Алимова М. ст. гр. И-369
Санкт-Петербург
2012
СОДЕРЖАНИЕ
ВведеНИЕ ................................................................................
................ 3
1. Принцип работы РЛС МЕТЕОРИТ .................................................... 4
1.1. Технические характеристики ....................................................... 4
1.2. Функциональная схема .................................................................. 4
1.3. Принцип работы систем РЛС МЕТЕОРИТ ................................ 5
1.4. Отличие РЛС МЕТЕОРИТ от РЛС МЕТЕОРИТ – 2 ................ 10
2. Устройство и принцип работы радиозонда МАРЗ – 2 ................ 10
2.1. Устройство радиозонда МАРЗ – 2.............................................. 10
2.2. Принцип работы радиозонда МАРЗ – 2................................... 13
3. Проверка технических характеристик радиозонда МАРЗ – 2 с помощью КИПАС ................................................................................
.................................... 13
4. Контрольная выдержка радиозонда перед пуском.……………………16
4. Список используемой литературы................................................... 16
ВВЕДЕНИЕ
Система радиозондирования «Метеорит - МАРЗ» - это система, принадлежащая к оперативным отечественным системам зондирования атмосферы, в состав которой входит наземная импульсная радиолокационная станция типа (РЛС) «Метеорит» и радиозонд МАРЗ (малогабаритный аэрологический радиозонд).
В процессе реализации зондирования измеряются такие метеорологические величины как температура и относительная влажность воздуха, а также текущие координаты радиозонда. Это позволяет определить следующие важнейшие характеристики: скорость и направление ветра, давление воздуха, температуру точки росы и другие.
Система радиозондирования «Метеорит — МАРЗ» притерпела ряд модификаций; поэтому в настоящее время используется РЛС типа «Ме-теорит-2» и радиозонд МАРЗ-2-2.
При разработке радиолокационной станции Метеорит – 2 были внедрены следующие технические усовершенствования:
1. Повышение точности угловых координат.
2. Разработка и улучшение датчиков температуры и влажности.
3. Разработка специальных эталонных радиозондов.
4. Автоматизация обработки данных.
5. Микроминиатюризация элементов радиозонда и РЛС.
6. Повышение потенциала РЛС.
В данной работе рассматриваются сравнительные характеристики Метеорит – 2 и МАРЗ, поскольку эти станции схожи друг с другом.
1. Принципы работы РЛС МЕТЕОРИТ
1.1. Технические характеристики
-Диапазон частот электромагнитной энергии, излучаемой передатчиками РЛС 1772.5 – 1792.5 МГц
-Импульсная мощность передатчиков:
маломощного = 1 кВт и большой мощности = 200 кВт
-Длительность излучаемых импульсов:
запрос = (1.5 ± 0.3) мкс; частота повторения импульсов запроса = 416 Гц;
-Антенна параболического типа с диаметром = 2.5 м;
-Ширина диаграммы направленности антенны = (5±1)°;
-Чувствительность приемника РЛС = 10-14 Вт;
-Дальность автоматического сопровождения радиозонда с регистрацией данных = 250 км;
-Средняя ошибка определения угловых координат радиозонда 7.2;
- Срединная ошибка измерения дальности:
при дальностях до 50 км = 20 м; при дальностях до 150 км = 40 м;
-Точность регистрации:
угловых координат = 3.6; дальности = 10 м; частот измеренных метеорологических величин = 1 Гц;
-Потребляемая мощность при напряжении питания 220 В = 9 кВА.
1.2. Функциональная схема
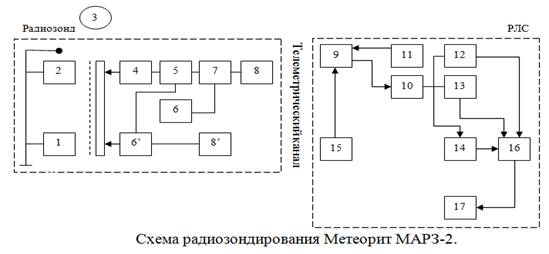
На схеме изображены два основных блока: радиозонда и РЛС. (Устройство и принципы работы МАРЗ – 2 мы рассмотрим в пункте 2.)
В состав блока РЛС входят:
9. Антенная система РЛС – АФС; 10. Приемная система РЛС;
11. Передающая система; 12. Система измерения дальности; 13. Система счета; 14. Система измерения угловых координат; 17. Система обработки информации; 16. Система регистрации данных; 15. Система управления антенной по угловым координатам
В следующем пункте рассмотрим принцип работы каждой системы МЕТЕОРИТ – 2. Это позволяет нам сравнить МЕТЕОРИТ с МЕТЕОРИТ – 2.
1.3. Принцип работы систем РЛС МЕТЕОРИТ – 2
 |
|
| |||
 | |||
1.3.1. Передающая система
Система предназначена для формирования кратковременных импульсов высокочастотной энергии большой и малой мощности.
Передатчик малой мощности МТМ-12 используется при сопровождении радиозонда в начальный период времени на дистанции до 1—2 км. При достижении расстояния до цели 1—2 км автоматически включается передатчик большой мощности МТМ-10, а передатчик малой мощности выключается. Импульсы с передатчиков по высокочастотному фидеру подаются на соответствующие антенны. В режиме «Уголковый отражатель» работает только мощный передатчик.
При работе станции в режиме «Радиозонд» во время измерения метеоданных импульсы запуска передатчика автоматически снимаются, и передатчик прекращает генерацию. Блок МТМ-11 обеспечивает формирование импульсов управления передатчиком большой мощности.
1.3.2. Антенно-фидерная система
Антенно-фидерная система необходима для канализации электромагнитной энергии СВЧ, генерируемой передатчиком, к антенне, для преобразования этой энергии в электромагнитные волны и излучения их в окружающее пространство в виде узконаправленного луча, для приема отраженных от уголкового отражателя или ответных сигналов передатчика радиозонда и передачи их по фидерному тракту в приемник.
Штырь-конусная антенна предназначена для излучения сигналов передатчика малой мощности при работе станции в режиме «Радиозонд».
1.3.3. Приемная система
Приемная система служит для преобразования принятых антенной сигналов и усиления их до величины, необходимой для нормальной работы систем дальности, управления антенной и счета. Основное усиление сигналов в приемнике осуществляется на промежуточной частоте 30 МГц.
Конструктивно приемник разделен на блоки. Блок МТМ-35 — электронный параметрический усилитель (ЭПУ) — обеспечивает первоначальное усиление принятых высокочастотных сигналов и их распределение по каналам АФС, выполняя функцию антенного переключателя.
Предварительное усиление на промежуточной частоте производится в блоке МТМ-31.
Главный усилитель МТМ-32 разделен на каналы: дальности (обеспечивает работу системы измерения дальности); угловой автоматики (обеспечивает работу системы управления антенной). В блоке МТМ-33 формируются считаемые импульсы метеоданных. В блоке МТМ-34 размещен генератор накачки ЭПУ.
1.3.4. Система измерения дальности
Система измерения дальности предназначена для синхронизации работы магнетронного передатчика, наблюдения и выбора объекта по индикатору дальности, ручного и автоматического сопровождения объекта по дальности, измерения дальности и передачи данных в систему регистрации, формирования импульсов, управляющих работой приемной системы, и синхронизации системы счета.
В системе есть индикатор для визуального наблюдения сигналов от объекта с масштабом развертки 30 и 2 км. Задержка начала развертки электронно-лучевой трубки может меняться относительно импульса запуска, что обеспечивает плавный выбор диапазона наблюдаемого сигнала в пределах всей дальности автосопровождения — 250 км. В системе предусмотрена схема автодальномера, которая обеспечивает автоматическое сопровождение по дальности и передачу данных о дальности в систему регистрации. Сопровождение по дальности можно осуществлять и вручную. Система разделена на блоки: дальности МТМ-51; автосопровождения по дальности МТМ-52; управления по дальности МТМ-53.
1.3.5. Система управления антенной
Система управления антенной обеспечивает управление положением антенны. Предусмотрены три режима работы системы: ручного управления, автоматического сопровождения и дистанционного управления.
Режим ручного управления используется для поиска объекта и сопровождения его перед переходом на автоматическое сопровождение. Режим автоматического сопровождения используется для точного определения угловых координат сопровождаемого объекта. Режим дистанционного управления позволяет управлять антенной системой с выносного пульта ручного управления.
Конструктивно система управления антенной разделена на блоки: блок управления антенной МТМ-71; блок сопровождения мо азимуту и углу места МТМ-72; блок магнитных усилителей МТМ-73; блок антенной колонки МТМ-74; блок автосопровождения по угловым координатам МТМ-75; пульт дистанционного управления МТМ-76.
1.3.6. Система счета
Система необходима для подсчета числа импульсов метеоданных в определенном интервале времени, поступающих от радиозонда, и для синхронизации работы системы передачи/регистрации данных.
Подсчет импульсов единиц и десятков метеоданных производится счетчиком МТМ-41, а сотен и тысяч — счетчиком МТМ-42. В блоке эталонных импульсов МТМ-43 формируются импульсы, определяющие время счета и время печати результатов счета, и импульсы сброса результатов счета.
Система счета может работать в режиме «Абсолютный счет», когда время подсчета импульсов равно 1 с, и в режиме «Относительный счет», когда время подсчета импульсов может изменяться оператором в пределах 0,87—0,99 с. В случае возникновения замирания сигналов счет прекращается на время замирания. Результаты счета контролируются по приборам.
Кроме того, в системе счета вырабатываются импульсы с частотой следования 1000 Гц для проверки работы системы и напряжение синхронизации счетчика времени. Индикацию счета импульсов обеспечивает блок электронного индикатора счета импульсов МТМ-44.
1.3.7. Система передачи и регистрации данных
Система предназначена для передачи значений текущих угловых координат и наклонной дальности цели в автоматическое регистрирующее устройство МТМ-62 и для регистрации времени, текущих координат и метеоданных на бумажной ленте. Передача угловых координат с антенной колонки и наклонной дальности из системы дальности осуществляется с помощью сельсинных связей. Печать этих данных происходит через каждые 5 или 30 с. Метеоданные печатаются через каждые 2,5 или 5 с специальными механизмами печати.
Программа регистрации метеоданных, т. е. темп регистрации, вырабатывается в блоке эталонных импульсов.
Формирование напряжений, обеспечивающих регистрацию угловых координат и дальности, производится в блоке сервоусилителей МТМ-61 и в блоке магнитных усилителей МТМ-63.
1.3.8. Система электропитания
Система электропитания служит для обеспечения всех систем станции необходимыми для их нормальной работы напряжениями.
На вход системы подается напряжение 220 В, 400 Гц от станции питания или от сетевого агрегата питания.
1.4. Отличие РЛС МЕТЕОРИТ от РЛС МЕТЕОРИТ – 2
| Характеристика | МЕТЕОРИТ | МЕТЕОРИТ – 2 |
| Используемый радиозонд | МАРЗ – 2 – 1 | МАРЗ – 2 – 2 |
| Чувствительность | Меньше | Больше |
| Причина: за счет усилителя высокой частоты | ||
| Диаметр параболоида | 1.8м | 2.5м |
| Дальность сопровождения отражателя с углом в 500 мм | 40км | 60км |
| Диаграмма направленности | 6˚±1˚ | 5.0˚±0.5˚ |
| Радиус дальности обнаружения | 150км | 250-300км |
| Длительность паузы | 65 ± 15 мкс | 240 ± 40 мкс |
| Дистанционный пульт управления с оптической системой | - | Есть, и это позволяет перейти в режим автоматического сопровождения по угловым координатам |
2. Устройство и принцип работы радиозонда МАРЗ – 2
2.1. Устройство радиозонда МАРЗ – 2
Малогабаритные аэрологические радиозонды типа МАРЗ предназначены для преобразования значений основных метеорологических величин (температура и относительная влажность воздуха) в радиотелеметрический сигнал, принимаемый аэрологической радиолокационной станцией (РЛС), а также для формирования ответного сигнала на запросный импульс РЛС. По измеренным координатам радиозондов типа МАРЗ определяются скорость и направление ветра в атмосфере.
Совместно с РЛС «Метеорит», «Метеор» используются радиозонд МАРЗ-2-1 и ответчик МАРЗ-0. Совместно с РЛС Метеорит-2 используются радиозонд тип МАРЗ-2 и ответчик МАРЗ-0. В качестве датчика температуры используется полупроводниковый терморезистор ММТ-1, датчика влажности - мембрана из животной пленки, механически соединенной с реостатом.
Рассмотрим функциональную схему МАРЗ – 2
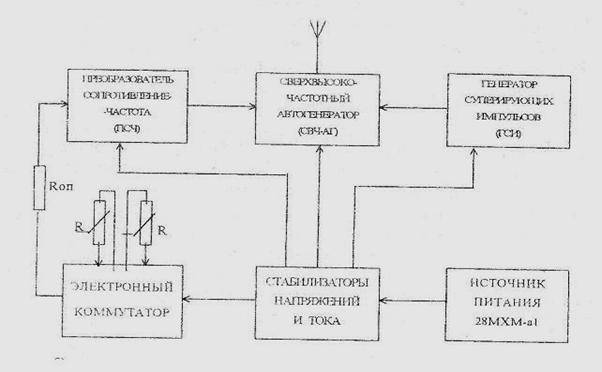
Функциональная схема радиозонда МАРЗ-2 включает в себя сверхрегенеративный приемопередатчик, имеющий сверхвысокочастотный автогенератор (СВЧ-АГ), генератор суперирующих импульсов (ГСИ), измерительный преобразователь сопротиваление-частота (ПСЧ), электронный коммутатор, источник питания и стабилизатор напряжения и тока. Сверхрегенеративный приемопередатчик, состоящий из генератора суперирующих импульсов и ключей внешней модуляции, совмещает в себе функции передатчика на частоте 1782 МГц и высокочувствительного приемника. Чувствительность радиозонда к запросным радиоимпульсам РЛС длительностью 0,8 мкс и частотой следования от 400 до 900 Гц не более 60 дБ относительно 1 Вт/м2. В качестве СВЧ-АГ используется модуль СВЧ М 45302. Генератор суперирующих импульсов вырабатывает импульсы частотой 800±25 кГц, которые поступают на вход управления СВЧ-АГ. Коммутирующая схема электронного коммутатора служит для циклического подключения к входу в ПСЧ только опорного резистора или опорного резистора, соединенного последовательно с узлом температуры и влажности. Очередность следования частот телеметрии Foп Ft Fu Ft Fon. Длительность цикла передачи частот телеметрическоого сигнала каждого канала составляет 25±5 с.
Диапазон измерения относительной влажности воздуха от 15 до 98 % в диапазоне изменения температуры от 50 до -40°С. Диапазон изменения опорной частоты Fon в рабочих условиях применения:
(2080±80) Гц для радиозондов МАРЗ-2-1;
(1080±40) Гц для радиозондов МАРЗ-2-2.
Диапазон изменения частоты температуры Ft в рабочих условиях применения - от 50 до (Fоn - 25) Гц. Диапазон изменения частиц относительной влажности Fu в рабочих условиях применения:
от 1400 до (Fоn- 20) Гц для радиозондов МАРЗ-2-1;
от 500 до (Fоn- 20) Гц для радиозондов МАРЗ-2-2.
Плотность потока излучаемой мощности на расстоянии около 2 м от центра противовеса антенны в направлении максимального излучения должна быть не менее 1,4-10 Вт/м. Для обеспечения стабильной работы радиоблока служат стабилизаторы питания: стабилизатор напряжения 6 В; стабилизатор напряжения 24 В; стабилизатор тока корректора СВЧ-АГ.
2.2. Принцип работы радиозонда МАРЗ – 2
С выхода преобразователя сопротивление-частота (ПСЧ) сигнал поступает на вход сверхвысокочастотного автогенератора и совместно с ГСИ осуществляет с помощью ключей внешней модуляции амплитудно-импульсную модуляцию несущей частоты СВЧ-АГ. Измеренные радиозондом значения основных метеорологических величин кодируются в соответствующие значения частот повторения импульсов телеметрической информации. При этом отрицательные импульсы телеметрической информации вызывают появление пауз в излучении СВЧ-АГ. В работе преобразователя сопротивление-частота (ПСЧ) радиозонда МАРЗ-2 использован мультивибратор на аналоговых однопереходных транзисторах (АОПТ).
Датчики температуры Rt и влажности Ru подключаются электронным коммутатором в цепь заряда емкости С1 последовательно с опорным сопротивлением. В реальных схемах мощность, выделяемая в датчиках температуры и влажности, не превышает 100 мкВт, что позволяет пренебречь погрешностью от перегрева датчика током.
Анализ метеорологического обеспечения и заводской технологии изготовления малогабаритных аэрологических радиозондов МАРЗ-2, а также погрешностей ручной автоматической обработки данных зондирования показывает, что суммарная погрешность измерения температуры и влажности при автоматизации получения статических характеристик преобразования (СХП) радиозондов МАРЗ-2 может быть уменьшена.
3. Проверка технических характеристик радиозонда МАРЗ – 2 с помощью КИПАС
Комплект измерительных приборов аэрологической станции (КИПАС) состоит из:
1. Стенд
2. Резонансный частотомер – меряет сверхвысокую частоту
3. Электронно-счетный частотомер – меряет низкую частоту (метеочастоту) Ft, Fu
4. Осциллограф
5. Запросчик – играет роль радиолокационной станции
Порядок выполнения проверки технических характеристик МАРЗ-2 с помощью комплекта измерительных приборов аэрологической станции (КИПАС):
Соединить приборы согласно функциональной схеме. Включить источник питания 28 В, 9,5 В. Включить «СЕТЬ» на стенде СП-1М (для подачи напряжения — 15 В на усилитель 800 кГц). Включить приборы Ч2-9А, Ч3-3З, С1-76 в положение «ВКЛ». Тумблеры «I95 В», «6,1 В», «2,4 В» на стенде СП-1М включать категорически запрещается!
Произвести измерения несущей частоты СВЧ-АГ радиозонда с помощью частотомера-волномера Ч2-9А (Ч2-8). Вращая ручку настройки частотомера, добиться максимального отклонения стрелки микроамперметра. С помощью градуировочной таблицы перейти от делений частотомера к частоте передатчика радиозонда. Радиозонд годен, если отклонение несущей частоты от значения 1782 мГц не превышает ±8 мГц.
Установить переключатель рода работы на стенде СП-1М в положение «СЧЕТ». На частотомере Ч3-33 снять значение частот Fоп, Ft, Fu, Ft, Fоп. Проследить последовательность подключения опорного сопротивления датчиков температуры и влажности. Сравнить значение опорной частоты Fоп по частотомеру с Fоп, приведенной в таблице СХП. Радиозонд бракуется, если отсчитанные значения превышают 2080±80 Гц для радиозонда МАРЗ-2-1, и 1080±40 Гц для радиозонда МАРЗ-2-2. За время не более 30 с на табло частотомера после Fоп должна появиться частота температуры Ft, а после Ft — частота влажности Fu. Если по истечении 30 с частоты Fоп, Ft, Fu не появляются, то радиозонд бракуется.
Установить переключатель на стенд СП-1М в положение «МОДУЛЬ», отключив датчик температуры и влажности от радиоблока. Произвести отсчет частоты ГСН на частотомере Ч3-33. Радиоблок годен при значениях частоты, не превышающих 800 кГц.
Установить переключатель на стенде СП-1М в положении «ОТВЕТ». Включить запросчик 3-2М. На осциллографе С1-76 ручкой стабилизации добиться устойчивого ответного сигнала на экране. Проверять качество и глубину провала ответной паузы, которая должна быть не менее половины амплитуды сигнала радиозонда.
Поставить переключатель на стенде СП-1М в положение «ПАУ3А». Зарисовать форму сигналов на осциллографе С1-76. Определить длительность импульсов и пауз метеопараметров.
Функциональная схема проверки радиозондов МАРЗ-2:
а) – схема подключения радиозонда МАРЗ-2 к КИПАС;
б) – соединение датчиков температуры, влажности, радиозонда и источников питания с радиозондом МАРЗ-2.
4. Контрольная выдержка радиозонда МАРЗ перед выпуском
Необходимые приборы для проведения контрольной выдержки радиозонда:
1. радиозонд типа МАРЗ-2;
2. аспирационный психрометр;
3. барометр-анероид;
4. психрометрические таблицы;
5. КИПАС.
Порядок выполнения:
1. Установить радиоблок на стенде поверки.
2. Включить источники питания радиозонда.
3. Подключить вилку источника питания (28 В; 9,5 В) к радиоблоку радиозонда МАРЗ, подключить датчики температуры и влажности к радиоблоку (см. рис. Функциональная схема проверки радиозондов МАРЗ-2)
4. Включить «СЕТЬ» на стенде СП-1М.
5. Установить переключатель рода работы на стенде СП-1М.
6. Включить частотомер Ч3-33.
7. Смочить батист аспирационного психрометра, включить вентилятор аспирационного психрометра.
8. Через 3-4 минуты произвести отсчет показаний аспирационного психрометра (tсух, tсм).
9. Произвести отсчет 2-3 циклов коммутации значений частоты (Fon,Ft,Fu) на частотомере Ч3-33.
10. Занести данные в таблицу.
11. Снять значения давления по барометру-анероиду и ввести поправки.
12. Определить относительную влажность по психрометрическим таблицам.
13. Вычислить Yt и Yu no формулам: Yt = Ft / Fon ; Yu- Fu / Fon. По вычисленным значениям Yt и Yu параметров, с помощью градуировочного графика СХП (таблицы СХП) определить измеренные радиозондом значения температуры (tp/3) и относительной влажности (ир/3).
14. Провести расчет значений температуры (tp/3) и относительной влажности (Uр/3), используя соответствующие коэффициенты из этикетки радиозонда с помощью ЭВМ. Сравнить результаты измерения температуры, выполненные графически (по таблицам СХП) и с помощью формул. Занести в таблицу полученные данные и проанализировать результаты.
15. Вычислить разность температуры (Δt) и относительной влажности (Δu), измеренных радиозондом и метеорологическими приборами. Сравнить их с допустимыми значениями: | Δt | <1,2°С; | Δu | <20%. При соблюдении данных условий радиозонд годен для температурно-ветрового зондирования, в противном случае он бракуется.
5. Список используемых литератур
1.Белов Н. П. «Метеорологические радиолокационные станции», Гидрометеоиздат, Ленинград, 1976
2.Осипов Ю. Г. «Руководство к лабораторным работам 1-3 “Система зондирования Метеорит МАРЗ-2”», Российский Государственный ГидроМетеорологический Университет, Санкт-Петербург, 1998
3.Киселев В.Н., Кузнецов А.Д. Методы зондирования окружающей среды (атмосферы). Учебник. – СПб., изд. РГГМУ, 2004. – 429 с.
 (zip - application/zip)
(zip - application/zip)









