










МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
 |
 Кафедра «Электротехнические
комплексы»
Кафедра «Электротехнические
комплексы»
РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА
по теме:
«ТРАМВАЙ С АСИНХРОННЫМ ТЯГОВЫМ ПРИВОДОМ И ЕГО ХАРАКТЕРИСТИКИ»
Дисциплина «Современные проблемы электрической тяги»
 Факультет:
мехатроники
и автоматизации
Факультет:
мехатроники
и автоматизации
 Группа:
ЭММ-13
Группа:
ЭММ-13
 Выполнил:
Баранова
Е.М.,Заяц К.Ю.
Выполнил:
Баранова
Е.М.,Заяц К.Ю.
 Руководитель:
Щуров
Н.И.
Руководитель:
Щуров
Н.И.
Новосибирск
2015
Содержание
ВВЕДЕНИЕ.. 3
1 СТРУКТУРА И ОСНОВНЫЕ ЭЛЕМЕНТЫ ТЯГОВОГО ЭЛЕКТРОПРИВОДА.. 4
2 СРАВНИТЕЛЬНАЯ ХАРАКТЕРИСТИКА ТЯГОВОГО ПРИВОДА ПОСТОЯННОГО ТОКА С АСИНХРОННЫМ ТЯГОВЫМ ПРИВОДОМ... 6
3 ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННО-ПЕРЕМЕННОГО ТОКА.. 9
4 Характеристики ЭПС с асинхроннымИ тяговымИ ДВИГАТЕЛЯМИ.. 13
5 СИСТЕМЫ УПРАВЛЕНИЯ ЭПС ПОСТОЯННОГО ТОКА С АТД.. 19
7 Элементная база.. 23
ЗАКЛЮЧЕНИЕ.. 26
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ.. 27
ВВЕДЕНИЕ
Требования повышения надежности работы транспорта и снижения затрат на эксплуатацию диктуют необходимость применения современных систем управления тяговыми электроприводами на городском электротранспорте. Применение транзисторных систем управления тяговыми двигателями позволяет значительно повысить экономичность за счет снижения энергопотребления, сокращения затрат на обслуживание и уменьшения простоев подвижных единиц [1].
Первые разработки в области асинхронного трехфазного тягового привода с использованием обычных, а затем и запираемых тиристоров появились в начале 1970-х годов. Преимуществам трехфазного привода, позволяющего отказаться от коллекторных двигателей в пользу надежных и простых асинхронных, противостояли повышенные затраты на тяговые преобразователи. Высокая стоимость последних объясняется сложностью не только силовой части, но также устройств управления и регулирования. Кроме того, большое значение имели масса, занимаемый объем и надежность этих элементов в сравнении с традиционной техникой того периода [2].
1 СТРУКТУРА И ОСНОВНЫЕ ЭЛЕМЕНТЫ ТЯГОВОГО ЭЛЕКТРОПРИВОДА
Как известно, любое тело не может перемещаться в пространстве без приложения к нему усилия, например, от внешнего воздействия. Применительно к транспортным средствам само усилие независимо от его источника называется тяговым. Тяговое усилие может быть реализовано и внутри самого тела, если оно оснащено устройством для создания такого усилия. В том случае, когда для питания подобного устройства используется электрическая энергия, преобразуемая в нем в механическую, устройство называется тяговым электрическим двигателем. При этом тяговый электродвигатель может создавать как крутящий момент на своем валу, так и непосредственно тяговое усилие (линейный тяговый электродвигатель). Создаваемый на валу тягового электродвигателя крутящий момент необходимо преобразовать в тяговое усилие на колесе, для чего используется механическая передача. Совокупность перечисленных элементов образует электрический привод, а поскольку он предназначен для создания тягового усилия подвижного состава, его называют тяговый электрический привод.
Таким образом, под тяговым электроприводом подразумевается совокупность элементов электрического и механического оборудования транспортного средства, предназначенное для управляемого преобразования энергии источника питания в энергию поступательного движения транспортного средства.
В отличие от других видов электроприводов неотъемлемой частью тягового стал источник питания, поскольку на некоторых видах подвижного состава он размещается непосредственно на его борту. Так как транспортное средство осуществляет не только разгон, но и торможение, то привод должен обеспечивать и этот режим движения.
Наличие в составе тягового электропривода электрической машины, которая, как известно, обладает свойством обратимости (т.е. может работать как двигатель, так и в качестве генератора), позволяет реализовать все режимы движения подвижного состава: пуск, движение с заданной скоростью, выбег, подтормаживание и торможение почти до полной остановки.
В состав тягового электропривода входят (рис. 1): блок ИЭ - источник энергии; Пр - преобразователь; ЭМПр – электромеханический преобразователь (тяговый электродвигатель); МП – механическая передача; Дв – движитель (пневматическое колесо, колесная пара и т.д.); СУ – система управления.
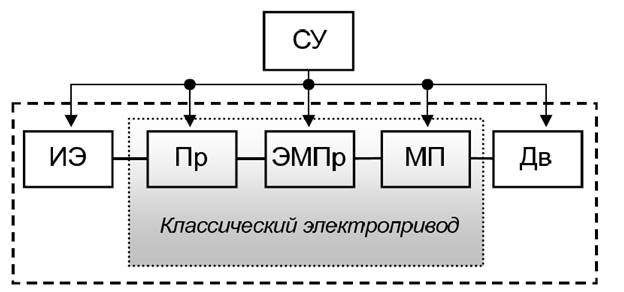
Рисунок 1 – Структурная схема тягового электрического привода
В зависимости от того, какой в приводе используется электромеханический преобразователь, различают приводы на постоянном и переменном токе [1].
2 СРАВНИТЕЛЬНАЯ ХАРАКТЕРИСТИКА ТЯГОВОГО ПРИВОДА ПОСТОЯННОГО ТОКА С АСИНХРОННЫМ ТЯГОВЫМ ПРИВОДОМ
До конца ХХ в. на подвижном составе городского электротранспорта (трамвай, троллейбус, метро) на территории бывшего СССР применялся электропривод постоянного тока с релейно-контакторной системой управления (РКСУ). Такой привод обладает следующими недостатками:
· наличие коллектора у двигателей постоянного тока требовало обслуживания коллекторного щеточного узла и диктовало необходимость его защиты от попадания влаги, что в условиях эксплуатации достаточно сложно было обеспечить, поэтому в сырую (снежную) погоду увеличивалось число отказов тяговых двигателей.
· отсутствие возможности возвращения части энергии при торможении в контактную сеть (рекуперативное торможение).
· использование пуско-тормозных реостатов для регулирования скорости приводило к увеличению потерь на регулирование, особенно при движении на низких скоростях.
· необходимость использования большого количества контактных элементов, осуществляющих коммутацию под током (до 200 А) и требующих периодического обслуживания.
· инертность систем токовой защиты не позволяла ограничить токи в аварийных режимах.
Были попытки заменить РКСУ тиристорными системами управления (ТиСУ), но из-за несовершенства элементной базы широкого распространения такие системы не получили, а в 90-е годы прошлого века в большинстве случаев на подвижном составе ТиСУ были заменены на РКСУ.
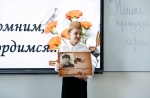
В 1996 г. был впервые испытан и передан в эксплуатацию на трамвайном вагоне ЛВС-86А (№ гор. 2200, рис. 2) тяговый электропривод переменного тока.

Рисунок 2 – Первый в России трамвай с двигателями переменного тока
К концу 90-х годов впервые в России тяговый привод переменного тока был внедрен на всех видах городского электротранспорта — трамваях, троллейбусах и метрополитене.
С середины 2000 г. в ряде городов, таких как Москва, Санкт-Петербург, Казань, осуществляется закупка подвижного состава для наземного городского транспорта только с приводом переменного тока.
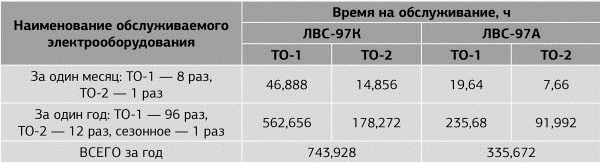
Таблица 1 - Сравнительный анализ времени, затрачиваемого на выполнение ТО-1 и ТО-2 вагонов модели ЛВС-97К, зав. № 6203 (РКСУ), и модели ЛВС-97А, зав. № 6201 (с асинхронными тяговыми двигателями) [2]
Преимуществам трехфазного привода, позволяющего отказаться от коллекторных двигателей в пользу надежных и простых асинхронных, противостояли повышенные затраты на тяговые преобразователи. Высокая стоимость последних объясняется сложностью не только силовой части, но также устройств управления и регулирования. Кроме того, большое значение имели масса, занимаемый объем и надежность этих элементов в сравнении с традиционной техникой того периода.
Применение современных полупроводниковых приборов решило проблему использования асинхронных ТЭД на новой технической основе.
С помощью устройств, называемых инверторами, которые преобразуют постоянный ток в трехфазный переменный регулируемой частоты.
Регулирование режимов работы АТД заключается в преобразовании по заданным законам напряжения и тока источника питания в систему напряжения и тока требуемого для питания обмоток бесколлекторного двигателя .
3 ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННО-ПЕРЕМЕННОГО ТОКА
Применение на электрическом транспорте электродвигателей переменного тока при электроснабжении на постоянном токе обусловило необходимость преобразования постоянного тока в трёхфазный переменный, причём регулируемой частоты. Преобразователи такого типа получили название инверторы. В настоящее время применяются инверторы двух типов – инверторы тока и инверторы напряжения. Преобразование осуществляется при помощи ключей, в качестве которых используются тиристоры и транзисторы. Для пояснения принципа работы инверторов используем схему цепей преобразователя, представленную на рис. 3. Входные цепи преобразователя, состоящего из 6 ключей, присоединены к источнику постоянного напряжения. Выходные цепи образуют выводы (фазы) а, в, и с, присоединённые к общим точкам ключей К1-К2, К3-К4 и К5-К6. При замыкании ключей с нечётными номерами на соответствующие фазы подаётся положительный потенциал источника питания, а при замыкании ключей с чётными номерами – отрицательный.

Рисунок 3 – Принципиальная схема цепи преобразователя и временная диаграмма
Длительность проводящего состояния ключей в течение периода регулирования может изменяться от 1200 эл. до 1800 эл.
Рассмотрим принцип работы преобразователя при 1200 схеме управления. В интервале времени от нуля до Т/6 в проводящем состоянии находятся ключи К1 и К4. При этом ток нагрузки протекает по цепи «+» источника – К1 – фаза а – нагрузка – фаза в – ключ К4 – «-» источника питания.
В момент времени Т/6 размыкается ключ К4 и замыкается ключ К6. В интервале Т/6 – Т/3 ток нагрузки протекает по цепи «+» источника – К1 – фаза а – нагрузка – фаза с – ключ К6 – «-» источника питания. В момент времени Т/3 размыкается ключ К1 и замыкается ключ К3. В интервале Т/3 – Т/2 ток нагрузки протекает по цепи «+» источника – К3 – фаза в – нагрузка – фаза с – ключ К6 – «-» источника питания. При этом направление тока в фазе в – обратное по отношению к периоду времени 0 – Т/6.
В момент времени Т/2 размыкается ключ К6 и замыкается ключ К2. В интервале Т/2 – 2Т/3 ток нагрузки протекает по цепи «+» источника – К3 – фаза в – нагрузка – фаза а – ключ К2 – «-» источника питания. При этом направление тока в фазе а – обратное по отношению к периоду времени 0 – Т/3. В момент времени 2Т/3 размыкается ключ К3 и замыкается ключ К5. В интервале 2Т/3 – 5Т/6 ток нагрузки протекает по цепи «+» источника – К5 – фаза с – нагрузка – фаза а – ключ К2 – «-» источника питания. При этом направление тока в фазе с – обратное по отношению к периоду времени Т/6 – Т/2. В момент времени 5Т/6 размыкается ключ К2 и замыкается ключ К4. В интервале 5Т/6 – Т ток нагрузки протекает по цепи «+» источника – К5 – фаза с – нагрузка – фаза в – ключ К4 – «-» источника питания. При этом направление тока в фазе в – обратное по отношению к периоду времени Т/3 – 2Т/3.
В момент времени Т размыкается ключ К5 и замыкается ключ К1. При этом направление тока в фазе а изменяется на исходное. Далее процессы в схеме повторяются.
Современные системы управления тяговым электроприводом городского электротранспорта строятся на основе силовых электронных преобразователей на IGBT-транзисторах с микропроцессорным управлением. Основным преимуществом тяговых электронных преобразователей по сравнению с реостатно-контакторной системой управления (РКСУ) являются:
- достижение высокой комфортности перевозки пассажиров и условий работы водителя за счет плавности режимов разгона и торможения, автоматической компенсации реакций упругих звеньев подвески;
- отсутствие большого количества контактных аппаратов (контакторов, группового контроллера, реле), что существенно повышает надежность системы управления;
- отсутствие потерь в пусковых реостатах и рекуперация энергии в контактную сеть при торможении значительно повышают КПД привода в целом и снижают потребление энергии от 40 до 65%;
- возможность применения асинхронного двигателя или двигателя постоянного тока без изменения конструкции преобразователя;
- снижение требований к профессиональной подготовке обслуживающего персонала, значительное снижение объемов регламентных работ по обслуживанию;
- полная автоматизация диагностики и тестирования работы узлов и элементов;
- реализация оптимальных алгоритмов векторного управления, минимизирующих потребление энергии
Таблица 2 Характеристики современных мощных силовых ключей с двусторонним теплоотводом [3]
|
Тип прибора |
Преимущества |
Недостатки |
Области применения |
|
Традиционный тиристор (SCR) |
Самые низкие потери во включенном состоянии. Самая высокая перегрузочная способность. Высокая надежность. Легко соединяются параллельно и последовательно. |
Не способен к принудительному запиранию по управляющему электроду. Низкая рабочая частота. |
Привод постоянного тока; мощные источники питания; сварка; плавление и нагрев; статические компенсаторы; ключи переменного тока |
|
GTO |
Способность к управляемому запиранию. Сравнительно высокая перегрузочная способность. Возможность последовательного соединения. Рабочие частоты до 250 Гц при напряжении до 4 кВ |
Высокие потери во включен-ном состоянии. Очень большие потери в системе управления. Сложные системы управления и подачи энергии на потенциал. Большие потери на переключение. |
Электропривод; статические компенсаторы; реактивные мощности; системы бесперебойного питания; индукционный нагрев |
|
IGCT |
Способность к управляемому запиранию. Перегрузочная способность та же, что и у GTO. Низкие потери во включенном состоянии на переключение. Рабочая частота - до единиц кГц. Встроенный блок управления (драйвер). Возможность последовательного соединения. |
Не выявлены из-за отсутствия опыта эксплуатации |
Мощные источники питания (инверторная и выпрямительная подстанции линий передач постоянного тока); электро-привод (инверторы напряжения для преобразователей частоты и электроприводов раз-личного назначения) |
|
IGBT |
Способность к управляемому запиранию. Самая высокая рабочая частота (до 10 кГц). Простая неэнергоемкая система управления. Встроенный драйвер. |
Очень высокие потери во включенном состоянии |
Электропривод; системы бесперебойного питания; статические компенсаторы и активные фильтры; ключевые источники питания |
4 Характеристики ЭПС с асинхроннымИ тяговымИ ДВИГАТЕЛЯМИ
Асинхронный двигатель работает на принципе взаимодействия вращающегося магнитного поля статора и тока, возникающего в роторе под влиянием наведенной ЭДС.
Одним из важных параметров режима работы АД является относительное скольжение:

где
 и
и  - соответственно
частота вращения магнитного поля статора и частота вращения ротора,
- соответственно
частота вращения магнитного поля статора и частота вращения ротора,

Так
как частота тока, питающего обмотку статора  , а частота
вращения ротора
, а частота
вращения ротора  ,
то
,
то
Разность  называют абсолютной
частотой скольжения ротора.
называют абсолютной
частотой скольжения ротора.
Именно эту частоту имеет Э.Д.С. наводимая в роторе АТД.
Абсолютная
частота скольжения ротора  связана
с его относительным скольжением зависимостью
связана
с его относительным скольжением зависимостью  .
.
Относительное
скольжение меняется от  при
неподвижном роторе
при
неподвижном роторе
до
 , соответствующего
синхронной частоте вращения ротора.
, соответствующего
синхронной частоте вращения ротора.
Рабочей частью моментной характеристики М(s) АТД является отрезок
изменения
скольжения от до  , за которым лежит
область неустойчивой работы. Запас устойчивости двигателя определяют как
отношение максимального или критического момента, соответствующего критическому
скольжению, к его номинальному моменту.
, за которым лежит
область неустойчивой работы. Запас устойчивости двигателя определяют как
отношение максимального или критического момента, соответствующего критическому
скольжению, к его номинальному моменту.
Для
условий тяги и электрического торможения относительное скольжение  не
полностью определяет режим работы асинхронного двигателя: при движении ЭПС
приходится регулировать скорость, а следовательно
не
полностью определяет режим работы асинхронного двигателя: при движении ЭПС
приходится регулировать скорость, а следовательно  и
и  . Оказывается
возможным регулировать и напряжение, подводимое к тяговому двигателю. Поэтому
режимы работы асинхронного тягового двигателя могут быть самыми разнообразными
при одном и том же относительном скольжении .
Если еще учесть, что максимальный момент двигателя также зависит от величины
приложенного к нему напряжения и частоты тока, питающего статор, то при
изменении режимов работы ЭПС будет изменяться и запас устойчивости тягового
двигателя.
. Оказывается
возможным регулировать и напряжение, подводимое к тяговому двигателю. Поэтому
режимы работы асинхронного тягового двигателя могут быть самыми разнообразными
при одном и том же относительном скольжении .
Если еще учесть, что максимальный момент двигателя также зависит от величины
приложенного к нему напряжения и частоты тока, питающего статор, то при
изменении режимов работы ЭПС будет изменяться и запас устойчивости тягового
двигателя.
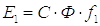
Для того чтобы установить наиболее эффективные законы регулирования режимов работы асинхронного тягового двигателя, рассмотрим зависимость момента вращения М асинхронного двигателя от его параметров:


 и
и
 - соответствующее
число пар полюсов и число фаз статора;
- соответствующее
число пар полюсов и число фаз статора;
 и
и
 - соответствующее
активное и индуктивное сопротивления статора;
- соответствующее
активное и индуктивное сопротивления статора;
 и
и
 - приведенные к
параметрам цепи статора активное и индуктивное сопротивления ротора;
- приведенные к
параметрам цепи статора активное и индуктивное сопротивления ротора;
 -
напряжение питания;
-
напряжение питания;
 -
постоянная статора, для ТЭД
-
постоянная статора, для ТЭД  ;
;
В силу того, что
в нормальном режиме относительно мало, то 
Пренебрегая
малым активным сопротивлением обмотки статора  (тогда
(тогда )
)
 где
где
Так как нагрузка тягового двигателя, а следовательно, и его вращающий момент меняются в эксплуатации в широких пределах, важно соблюдать условие, обеспечивающее наиболее экономичную работу тягового двигателя. Оно заключается в том, что при всех возможных режимах работы мощность потерь в двигателе должна быть минимальной, т.е.

где
 - сумма механических и магнитных
потерь в двигателе, Вт, которые не зависят от тока ротора
- сумма механических и магнитных
потерь в двигателе, Вт, которые не зависят от тока ротора .
.
Потери
в роторе  , где
, где
 - абсолютное скольжение ротора,
- абсолютное скольжение ротора, 
Тогда потери в роторе:
Следовательно,
условие  требует
того, чтобы абсолютная разность частот
требует
того, чтобы абсолютная разность частот  вращения поля
статора и ротора
была минимальной
во всех режимах работы АТД
вращения поля
статора и ротора
была минимальной
во всех режимах работы АТД

Чтобы выявить способы реализации этого условия сопоставим два режима нагрузки АТД
Режим 1
 и
и 
Режим 2
 и
и 
Так,
как 
Отношение вращающихся моментов для рассматриваемых режимов составит:

Отсюда
Следовательно, оптимальный режим работы АТД определяется соотношением трех его параметров:

Изменяя
соотношение между этим параметрами по определенному закону, можно обеспечить
работу с  , т.е. с
наибольшими к.п.д. и
, т.е. с
наибольшими к.п.д. и  .
.
Режим
работы ЭПС характеризуется  и
и
 , то общий закон
регулирования режимов ЭПС с АТД представлен в виде:
, то общий закон
регулирования режимов ЭПС с АТД представлен в виде:
Реализация режимов движения ЭПС:
Режим
пуска 
 ,
где
,
где  - ток ротора,
приведенный к цепи статора.
- ток ротора,
приведенный к цепи статора.
При
 будет и
будет и 
Постоянство
момента и силы тяги равносильно таким образом  . Это значит, что в
течении времени пуска ток статора должен быть неизменным, если необходимо
обеспечить
. Это значит, что в
течении времени пуска ток статора должен быть неизменным, если необходимо
обеспечить  , тогда
необходимо повышать напряжение приложенное к статору пропорционально скорости
, тогда
необходимо повышать напряжение приложенное к статору пропорционально скорости

После
выхода на номинальную характеристику АТД, т.е. при  для равномерной
нагрузки двигателя и устройств электроснабжения необходимо обеспечивать условие
постоянства мощности
для равномерной
нагрузки двигателя и устройств электроснабжения необходимо обеспечивать условие
постоянства мощности 
Т.к.
 откуда
откуда
 ,
режим
,
режим
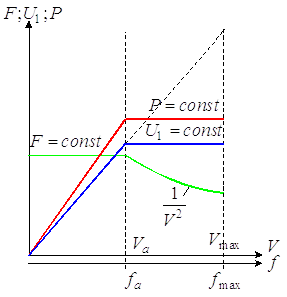
Режим постоянства скорости равносилен условию постоянства частоты
 и
и 
Режим
постоянства напряжения на АТД  ,
,
т.е.
 обеспечивается
законом регулирования
обеспечивается
законом регулирования

 -
- изменяется по закону квадратичной гиперболы
-
- изменяется по закону квадратичной гиперболы
0-
 - режим пуска
- режим пуска
 -
регулирование
-
регулирование  [4,5].
[4,5].
5 СИСТЕМЫ УПРАВЛЕНИЯ ЭПС ПОСТОЯННОГО ТОКА С АТД
Для ЭПС постоянного тока с асинхронным тяговым приводом (АТП) возможны два варианта структурных схем (рис. 5):
1) с автономным инвертором тока (рис. 5, а);
2) с автономным инвертором напряжения (рис. 5, б)
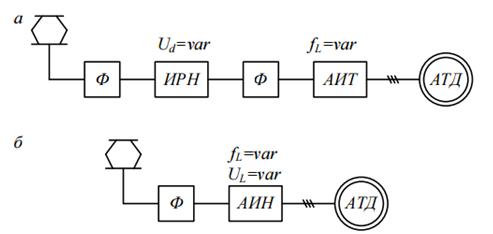
Рисунок 5 – Структурные схемы АТП для ЭПС постоянного тока с асинхронными ТЭМ: а – с АИТ; б – с АИН
В
схеме с автономным инвертором тока (АИТ) инвертор тока позволяет регулировать
только частоту  ,
поэтому для регулирования величины тока двигателя используется импульсный
регулятор напряжения (ИРН). Для сглаживания напряжения на входе и выходе ИРН
используется фильтр (Ф). Такая схема является более сложной по сравнению со
схемой с АИН (рис. 5, б), поэтому она в настоящее время практически не
используется.
,
поэтому для регулирования величины тока двигателя используется импульсный
регулятор напряжения (ИРН). Для сглаживания напряжения на входе и выходе ИРН
используется фильтр (Ф). Такая схема является более сложной по сравнению со
схемой с АИН (рис. 5, б), поэтому она в настоящее время практически не
используется.
ЭПС с асинхронными тяговыми машинами подразделяют на две основные группы:
1) с групповым питанием АТД;
2) с индивидуальным питанием АТД.
Электроподвижной состав с групповым питанием асинхронных тяговых электромашин
На ЭПС с групповым питанием АТЭ один инвертор питает группу тяговых двигателей. Схема содержит четыре асинхронных тяговых двигателя и два автономных инвертора напряжения. При этом для возможности перераспределения силы тяги в отдельно взятой тележке к выходным зажимам первого инвертора подключены первый и третий двигатели, а к выходным зажимам второго инвертора – второй и четвертый. На рис. 6 приведена силовая схема моторного вагона и силовая схема для питания 1-го и 3- го двигателей, а силовая схема для 2-го и 4-го двигателей показана условно, поскольку эти схемы идентичны. Автономный инвертор напряжения является двухуровневым и на выходе создаёт 12 положений результирующего вектора напряжения. Автономный инвертор напряжения получает питание от контактной сети через токоприемники ХА1 и ХА2, быстродействующий выключатель QF, линейный контактор QS, реактор входного фильтра L1 и токоотводящие устройства ХА5 и ХА6. Конденсаторы С1 и С2 служат одновременно делителем напряжения и частью входного фильтра.
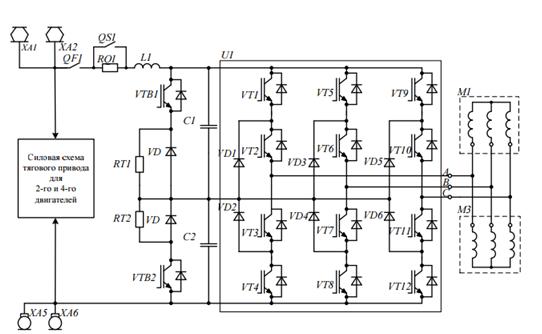
Рисунок 6 – Силовая схема моторного вагона с групповым
питанием АТД
Каждый инвертор выполнен конструктивно в виде отдельного блока, который содержит также тормозные прерыватели VTB1 и VTB2, диоды обратного тока VD и тормозные резисторы RT1 и RT2. При реостатном торможении тормозные прерыватели VTB1 и VTB2 осуществляют импульсное регулирование тока на тормозных резисторах RT1 и RT2. При запуске ЭПС и поднятии токоприемника сначала замыкается быстродействующий выключатель QF, а затем начинает происходить заряд конденсаторов С1 и С2 через резистор RQ1. При достижении на конденсаторах требуемого уровня напряжения в контактной сети происходит замыкание линейного контактора QS, в результате чего резистор RQ1 выводится из цепи протекания тока. Изначальный заряд конденсаторов через резистор необходим для ограничения максимального тока заряда при запуске ЭПС. Необходимые тяговые и тормозные усилия формируются системой управления в зависимости от скорости движения ПС.
Электроподвижной состав с индивидуальным питанием асинхронных тяговых электромашин
Регулирование скорости электровоза производится изменением частоты напряжения на выходе тяговых преобразователей и соответственно напряжения трех фаз каждого тягового асинхронного двигателя.
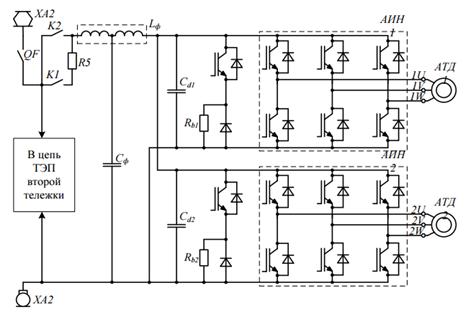
Рисунок 7 – Силовая схема моторного вагона с индивидуальным
питанием АТД
Напряжение контактной сети в кВ поступает в цепь тягового электро- привода секции через входной LC-фильтр. Каждый тяговый электродвигатель запитан от индивидуального тягового преобразователя (АИН1 и АИН2), построенного на IGBT-транзисторах 65-го класса. Каждый модуль имеет встроенный драйвер управления, который выполняет требования системы верхнего уровня МПСУ и Д. После включения быстродействующего выключателя QF при поднятом токоприемнике кратковременно замыкается контактор К1 для зарядки конденсаторов Cф, Сd1, Сd2 через резистор R5. Благодаря этому сводится к минимуму пусковой ток, который возникает, если входное напряжение резко переключается на батарею пустых конденсаторов. Как только напряжение звена постоянного тока превысит 95 % теоретической конечной величины, то произойдет замыкание контактора К2, который выводит резистор R5 из цепи протекания тока. Конденсатор Сф и дроссель Lф представляют собой фильтр пульсаций тока, который выполняет роль энергетического накопителя, сглаживающего напряжение звена постоянного тока и сводящего к минимуму ответный сигнал цепи в сеть. Конденсаторы звена постоянного тока Сd1 и Сd2 служат в качестве энергетического накопителя, сглаживающего и буферизующего напряжение цепи звена постоянного тока. Их необходимость обусловлена тем, что значения энергии на входе и на выходе различаются на малых временных масштабах. Поэтому можно сказать, что эти конденсаторы энергетически отделяют магистраль питания от нагрузки. Система управления построена таким образом, что автоматическое регулирование каждого АИН может происходить независимо от других. При этом работа всех АИН согласуется с общим режимом движения ЭПС с целью рационального распределения силы тяги между двигателями. Поосное регулирование позволяет распределять силы тяги между осями ЭПС.
7 Элементная база
IGBT-модули в конструктивном исполнении «Е3-1» представляют собой сборки IGBT-транзисторов и БВД-диодов предназначенные для коммутации мощных нагрузок в составе преобразователей с максимальным пиковым напряжением 600 В и постоянным током до 600 А. IGBT-модули представлены следующими исполнениями:
В данной схеме управления выбран IGBT-модуль в исполнении М12-4200-6-Е3 с максимальным постоянным напряжением 600 В.
М12 – одиночный транзистор зашунтированный обратным быстровосстанавливающимся диодом.
Основные электрические параметры и предельно-допустимые параметры модулей при температуре 25 ° С представлены в таблице 3.
Таблица 3. Основные и предельно-допустимые параметры модулей 6-го класса
|
Параметр |
Обозначение |
Единица измерения |
Значение |
|
Пробивное напряжение коллектор-эмиттер (не менее),В |
U(DR) CES |
В |
600 |
|
Постоянное напряжение силовой цепи (не более),В |
UDC |
В |
350 |
|
Постоянный ток силовой цепи (не более), А |
IDC |
А |
200 |
|
Тепловое сопротивление переход-корпус транзистора (не более), ºС/Вт |
R T(j-c) VT |
ºС/Вт |
0,15 |
|
Тепловое сопротивление переход-корпус диода(не более), ºС/Вт |
R T(j-c) VD |
ºС/Вт |
0,25 |
|
Рассеиваемая мощность (не более), Вт |
P D |
Вт |
830 |
Основные характеристики обратного диода и их параметры приведены в таблице 4.
Таблица 4. Параметры обратных диодов
|
Параметр |
Обозначение |
Единица измерения |
Значение |
|
Прямое падение напряжения (типовое), В |
V F |
В |
2,1 |
|
Постоянный ток диода (не более), А |
I F |
А |
200 |
|
Импульсный ток диода при t имп =1 мс (не более), А |
I FM |
А |
600 |
|
Ток обратного восстановления (типовой), А |
I RR |
А |
250 |
|
Время восстановления (типовое), нс |
нс |
300 |
Электродвигатель 125 кВт индивидуального привода моторной оси четырехосного низкопольного пассажирского вагона трамвая

Рисунок 8 - Электродвигатель 125 кВт индивидуального привода моторной оси четырехосного низкопольного пассажирского вагона трамвая
Тяговый трехфазный короткозамкнутый асинхронный двигатель предназначен для привода моторной оси четырехосного низкопольного вагона трамвая.
Двигатель в комплекте с тяговым электрооборудованием обеспечивает движение и торможение вагона трамвая во всех его рабочих режимах.
Питание двигателя осуществляется от индивидуального инвертора напряжения, питаемого от контактной сети постоянного тока.
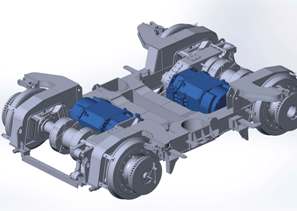
Рисунок 9 – Тележка низкопольного трамвая с асинхронными тяговыми двигателями
Таблица 6 – Параметры АТД
|
Технические параметры |
Значение |
|
Мощность, кВт |
125 |
|
Номинальное напряжение, В |
510 |
|
Номинальная частота, Гц |
80 |
|
Номинальный ток, А |
167 |
|
Длительно действующий момент, Нм |
503 |
|
КПД, % |
94,7 |
|
Номинальная частота вращения, об/мин |
2371 |
|
Коэффициент мощности |
0,89 |
ЗАКЛЮЧЕНИЕ
Таким образом, применения тягового привода позволяет сделать следующие выводы:
· замена тяговых двигателей постоянного тока на асинхронные тяговые двигатели повышает надежность подвижного состава и снижает расходы на обслуживание.
· применение транзисторных преобразователей для управления тяговыми двигателями значительно снижает эксплуатационные расходы, связанные как с техническим обслуживанием системы управления, так и с экономией электроэнергии, потребляемой тяговым электроприводом.
· любой проводимый капитально-восстановительный ремонт подвижного состава должен сопровождаться заменой резисторно-контакторного привода транзисторной системы управления [2].
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Бирюков В.В. Тяговый электрический привод [Текст]/ Бирюков В.В., Порсев Е.Г.; учеб.пособие – Новосибирск: Изд-во НГТУ, 2013. – 314 с.
2. Интернет-ресурс: http://controlengrussia.com/e-lektroprivod/dvadtsat-let-vnedreniya-asinhronnogo-e-lektroprivoda-na-gorodskom-e-lektrotransporte/ (03.12.2015 г.)
3. Бирюков В.В. Конспект лекций «Импульсные системы управления транспортными средствами»
4. Розенфельд В.Е. Теория электрической тяги [Текст]/ Розенфельд В.Е., Исаев И.П., Сидоров Н.Н.; учебник для вузов ж.-д. трансп. – 2-е изд., перераб. и доп. – М.: Транспорт, 1983-328 с.
5. Щуров Н.И. Конспект лекций «Асинхронный тяговый привод»
6. Интернет-ресурс: http://edu.dvgups.ru/METDOC/GDTRAN/NTS/EPS/S_YPREPS/METOD/U_P.PDF (09.12.2015г.)
 (zip - application/zip)
(zip - application/zip)









