












МИНИСТЕРСТВО ОБРАЗОВАНИЯИ НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
АО «АКАДЕМИЯ ГРАЖДАНСКОЙ АВИАЦИИ» АВИОЦИОННЫЙ КОЛЛЕДЖ
КУРСОВАЯ РАБОТА
По специальности: 1310000 «Техническая эксплуатация транспортного радиоэлектронного оборудования»
На тему: Спутниковые методы радионавигации.
По дисциплине: «Радионавигационные автоматические системы организации воздушного танспорта»
Выполнил обучающийся: Хомченко Роман Юрьевич
(Ф.И.О. обучающегося)
Руководитель,
преподаватель
спец. дисциплин : Дисенгалиева С.К.
(Ф.И.О. руководителя)
Алматы 2016
Таблица выбора варианта курсовой работы
|
Последняя цифра шифра (номера) зачетной книжки |
Номер вопроса контрольной работы |
|
1 |
1 |
|
2 |
2 |
|
3 |
3 |
|
4 |
4 |
|
5 |
5 |
|
6 |
6 |
|
7 |
7 |
|
8 |
8 |
|
9 |
9 |
|
0 |
10 |
Содержание
1. Введение
2. Цели и задачи данной работы
3. Спутниковые методы радионавигации
3.1. Главный принцип измерения в СНС.
3.2. Количество спутников в СНС.
3.3. Высота расположения спутников.
3.4. Зоны видимости ИСЗ.
4. Задания
5. Заключение
6. Литература
Спутниковые навигационные системы.
Глобальные спутниковые навигационные системы относятся к классу многопозиционных РНС (радионавигационных спутников) и предназначены для определения пространственного местоположения и направления движения потребителей в пределах или большей части поверхности Земли. Возможны также региональные СНС (спутниковые навигационные системы), обслуживающие ограниченные территории. Для авиационных целей представляют интерес СНС, обеспечивающие непрерывное определение пространственного местоположения летательного аппарата (ПМЛА).
Основу СНС составляет сеть (созвездие навигационных искусственных спутников Земли (НИСЗ), выполняющих функцию опорных радионавигационных точек (РНТ), отношение которых измеряет навигационные параметры. Конфигурация созвездия и число М ИСЗ выбираются из условий получения требуемой зоны для СНС, избыточного числа видимых спутников в точке приема (для выбора подходящих по геометрическому фактору рабочего созвездия), удобства управления системой и наименьшего влияния возможного движения спутника факторов.
Основные элементы спутниковой системы навигации:
Орбитальная группировка, состоящая из нескольких (от 2 до 30) спутников, излучающих специальные радиосигналы;
Наземная система управления и контроля, включающая блоки измерения текущего положения спутников и передачи на них полученной информации для корректировки информации об орбитах;
Приёмное клиентское оборудование («спутниковых навигаторов»), используемое для определения координат;
Проще говоря, это есть информационная радиосистема для передачи пользователям поправок, позволяющих значительно повысить точность определения координат.
На сегодняшний день самыми значительными являются следующие спутниковые навигационные системы:
· NAVSTAR (GPS)— принадлежит министерству обороны США, что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система.
· ГЛОНАСС — находится на этапе развёртывания спутниковой группировки. Принадлежит министерству обороны России. Обладает, по заявлениям разработчиков, некоторыми техническими преимуществами по сравнению с NAVSTAR, однако в настоящее время эти утверждения проверить невозможно ввиду недостаточности спутниковой группировки и отсутствия доступного клиентского оборудования.
· Бэйдоу — развёртываемая в настоящее время Китаем подсистема GNSS, предназначенная для использования только в этой стране. Особенность — небольшое количество спутников, находящихся на геостационарной орбите.
· Galileo — европейская система, находящаяся на этапе создания спутниковой группировки
Принцип работы
Принцип работы спутниковых систем навигации основан на измерении расстоянии от антенны на объекте (координаты которого необходимо получить) до спутников, положение которых известно с большой точностью. Таблица положений всех спутников называется альманахом, которым должен располагать любой спутниковый приемник до начала измерений. Обычно приемник сохраняет альманах в памяти со времени последнего выключения, и если он не устарел – мгновенно использует его. Каждый спутник передает в своем сигнале весь альманах. Таким образом, зная расстояния до нескольких спутников системы, с помощью обычных геометрических построений, на основе альманаха, можно вычислить положение объекта в пространстве.
Применение методов определения местоположения по сигналам глобальных навигационных спутниковых систем GPS/ГЛОНАСС для радионавигационных целей началось в Казахстане в 90-х годах прошлого века. Выявились их существенные преимущества по сравнению с традиционными радионавигационными методами. К ним относятся широкий диапазон точностей (от десятков метров до миллиметров на расстояниях в тысячи километров), независимость от погоды, времени суток и года, от взаимной видимости между пунктами, высокая автоматизация и, как следствие, оперативность, возможность работы непрерывно и в движении. Главным преимуществом явилась возможность позиционирования в трехмерном пространстве.
Вместе с тем применение спутниковых методов на практике выявило ряд недостатков: зависимость от препятствий, уязвимость от радиопомех, дорогое оборудование, но особенно необходимость в кардинальной корректировке теории и практики проведения геодезических работ с учётом нового подхода к координатным преобразованиям результатов спутниковых наблюдений.
В связи с этим для повышения эффективности применения спутниковых радио навигационных систем (СРНС) требовалось решение следующих задач:
-подготовка кадров высокой квалификации, способных обеспечить высокое качество выполнения работ по спутниковому позиционированию объектов местности, пунктов радионавигационных сетей различного назначения;
- разработка и выпуск аппаратуры и программного обеспечения;
-усовершенствование (модернизация) космических аппаратов, системы слежения и обработки траекторных измерений (наземный сегмент СРНС).
Выполнение этих задач было невозможно без решенияпроблем методологического и технологического обеспечения спутникового метода.Для Казахстана это было особенно важно, поскольку подавляющая часть аппаратуры и программного обеспечения до последнего времени поступала к нам из-за рубежа. Техническая документация к ним обычно ограничивалась описанием возможных опций без приведения какой-либо теории.
Метод измерения расстояния от спутника до антенны приёмника основан на определённости скорости распространения радиоволн. Для осуществления возможности измерения времени распространения радиосигнала каждый спутник навигационной системы излучает сигналы точного времени в составе своего сигнала используя точно синхронизированные с системным временем атомные часы. При работе спутникового приёмника его часы синхронизируются с системным временем и при дальнейшем приёме сигналов вычисляется задержка между временем излучения, содержащимся в самом сигнале, и временем приёма сигнала. Располагая этой информацией, навигационный приёмник вычисляет координаты антенны. Для получения информации о скорости большинство навигационных приёмников используют эффект Доплера. Дополнительно накапливая и обрабатывая эти данные за определённый промежуток времени, становится возможным вычислить такие параметры движения, как скорость (текущую, максимальную, среднюю), пройденный путь и т. д.
Спутниковые методы радионавигации
Определение координат
по наблюдениям спутников навигационных систем
выполняется: абсолютными, дифференциальными и
относительными методами.
В абсолютном методе координаты получаются одним
приемником в системе
координат, носителями которой являются станции подсистемы
контроля и
управления и, следовательно, сами спутники
навигационной системы. При этом реализуется
метод засечки положения приемника от известных положений космических аппаратов (КА). Часто этот метод называют
также точечным позиционированием.
В дифференциальном и относительном методах
наблюдения производят не
менее двух приемников, один из которых
располагается на опорном пункте с
известными координатами, а второй совмещен с
определяемым объектом. В
дифференциальном методе по результатам наблюдений
на опорном пункте
отыскиваются поправки к соответствующим
параметрам наблюдений для
неизвестного пункта или к его координатам, то
есть наблюдения обрабатываются раздельно.
Этот метод обеспечивает мгновенные решения, обычно называемые решениями в реальном времени. В них достигается более
высокая точность, чем в абсолютном
методе, но только по отношению к опорной станции. В относительном методе наблюдения, сделанные
одновременно на опорном и
определяемом пункте, обрабатываются совместно.
Это основное различие между относительным
и дифференциальным методом, которое приводит к повышению точности решений в относительном методе, но исключает
мгновенные решения.
В относительном методе определяется вектор,
соединяющий опорный и
определяемый пункты, называемый вектором базовой
линии.
Наблюдения в реальном времени (абсолютные,
дифференциальные или
относительные) предполагают, что полученное
положение будет доступно
непосредственно на месте позиционирования, пока
наблюдатель находится на
станции. При пост-обработке результаты получают
после ухода с пункта
наблюдений.
В каждом из трех указанных методов определений
координат возможны
измерения как по кодовым псевдодальностям (по
фазе кода), так и по фазе
несущей. Точность кодовых дальностей имеет
метровый уровень, в то время как точность
фазовых измерений лежит в миллиметровом диапазоне. Точность
кодовых дальностей, однако, можно улучшить, если
использовать метод узкого коррелятора
или сглаживание
по фазе
несущей, достигая
при этом
дециметровый и даже более высокий уровень
точности. В отличие от фаз несущих
колебаний, кодовые
дальности фактически
не содержат неоднозначностей. Это делает
их невосприимчивыми к потерям счета циклов(то есть изменениям неоднозначностей
фазы) и, в некоторой степени, к препятствиям
на пункте. Для фазовых же измерений критическим моментом является разрешение их неоднозначностей.
В каждом из методов возможны наблюдения в режимах статики и
кинематики. При статических наблюдениях оба приемника находятся в
стационарном положении относительно Земли, а при кинематическом
позиционировании один из приемников является стационарным, а другой –
движущимся. Оба приемника одновременно наблюдают одни и те же спутники.
Потеря захвата сигнала спутника для статического позиционирования не
является настолько важной, как при кинематическом позиционировании.
Статическое позиционирование позволяет накапливать данные, добиваясь
повышения точности. Относительное позиционирование по фазовым
измерениям является наиболее точным методом определения положений и
наиболее часто используется геодезистами. Преимуществом кинематического
позиционирования является его возможность получать траекторию движения
транспортного средства, на котором установлена спутниковая аппаратура.
Методы позиционирования делятся на две группы:
· определение абсолютных координат местоположения из псевдодальностей, полученных по дальномерным кодам (C/A, P, СТ, ВТ) – автономный и дифференциальный методы;
· определение приращения координат (или вектора) между пунктами, на которых установлены приемники, из псевдодальностей, полученных по измерениям фаз несущей частоты сигнала спутников – относительный метод.
Автономное позиционирование – автономное в том смысле, что координаты местоположения приемника определяются независимо от измерений, выполняемых другими приемниками. Данный метод чувствителен ко всем источникам погрешностей: погрешности в координатах спутников, влияние среды распространения и внешних воздействий, геометрический фактор. Как уже отмечалось, в GPS точность абсолютного позиционирования для гражданских пользователей составляет примерно 25-100 м по C/A-коду и примерно 30 см – для военных пользователей по P-коду. При точных измерениях автономное позиционирование используется для нахождения приближенных координат.
Принцип дифференциального позиционирования заключается в следующем. Измерения псевдодальностей выполняются по дальномерным кодам одновременно на двух (или более) пунктах: т. н. базовой станции, расположенной на пункте с известными координатами, и мобильной станции, расположенной на определяемом пункте. На базовой станции измеренные псевдодальности сравниваются с вычисленными по координатам и определяются их разности. Эти разности называются дифференциальными поправками.
Данный метод основан на предположении, что многие погрешности одинаково влияют на измерения, выполняемые на каждой станции. В самом деле, погрешности измерений по C/A-коду и возникающие из-за режима SA, на обеих станциях практически одни и те же. Влияние атмосферы на разных линиях может несколько различаться по причинам разной длины трасс и локальных неоднородностей на них. Однако экспериментальными данными установлено, что при расстоянии между пунктами менее 10 км, влияние атмосферы одинаково для обоих пунктов. Погрешности в координатах спутников также исключаются, причем в значительной мере. При погрешности координат спутников 10 м и расстоянии между пунктами 10 км разница в искажениях псевдодальностей до базовой и мобильной станций составляет 5 мм. Чем ближе расположены станции, тем точнее выполняется коррекция.
Поправки передаются на мобильную станцию, корректируя тем самым измерения, в реальном времени или учитываются в ходе вычисления координат после измерений. Передача и прием поправок в специальном формате RTCM в реальном времени выполняется при помощи специального оборудования – радиомодема. Передаваемые поправки быстро "стареют" и поэтому одновременно с поправками передают их "возраст" и данные о скорости их изменения. Точность дифференциального позиционирования около 1-5 м.
Относительный метод определения координат местоположения (относительное позиционирование) заключается в одновременном выполнении спутниковых измерений двумя (и более) приемниками.
В относительном методе через абсолютные координаты пунктов, полученные из непосредственных измерений, определяется приращение координат (пространственный вектор, baseline) между ними, которое будет свободно от ошибок абсолютного позиционирования. Таким образом, когда один приемник установлен на пункте с известными координатами, а другой – на определяемом, то пространственные координаты второго пункта определяются через вычисляемое приращение координат. В случае, когда оба приемника устанавливаются на пунктах с неизвестными координатами, определяется просто приращение координат, через которое можно вычислить расстояние и превышение между пунктами, азимут линии.
Применение относительного метода позволяет определить пространственный вектор (baseline) между пунктами с точностью 5мм + 1мм×10-6 D, где D – расстояние между пунктами в мм.
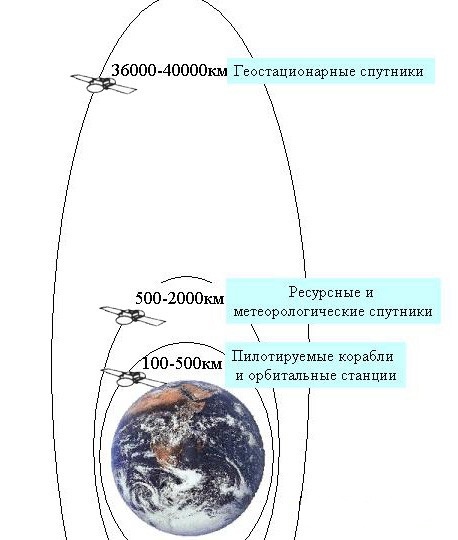
Высота расположения спутников
Высота расположения спутников – орбитальная высота спутников от поверхности Земли.
Система GPS имеет 24 рабочих спутника с орбитальным периодом в 12 часов на высоте примерно 20200 км от поверхности Земли. Указанная высота необходима для обеспечения стабильности орбитального движения спутников и уменьшения фактора влияния сопротивления атмосферы.
Система ГЛОНАСС также имеет 24 спутника высота орбиты которых составляет 19100 км. Использование таких орбит позволяет устранить недостатки, присущие системам первого поколения на низких орбитах ("Цикада", "Транзит") и создать глобальное навигационное поле, позволяющее любому подвижному потребителю уточнить в любой момент времени полный вектор положения (три составляющие координат и скорости, время). Принятый в системе пассивный (беззапросный) режим работы потребителя позволяет принимать радионавигационные сигналы спутников системы неограниченному количеству потребителей, оснащенных приемной аппаратурой.
Также существует такое понятие как Геостационарная орбита — круговая орбита, расположенная над экватором Земли (0° широты), находясь на которой искусственный спутник обращается вокруг планеты с угловой скоростью, равной угловой скорости вращения Земли вокруг оси, и постоянно находится над одной и той же точкой на земной поверхности. Геостационарная орбита является разновидностью геосинхронной орбиты и используется для размещения искусственных спутников (коммуникационных, телетрансляционных и т. п.)
Спутник должен обращаться в направлении вращения Земли, на высоте 35 786 км над уровнем моря (вычисление высоты ГСО см. ниже). Именно такая высота обеспечивает спутнику период обращения, равный периоду вращения Земли относительно звёзд (сидерические сутки: 23 часа 56 минут 4,091 секунды). Именно на этой орбитальной высоте расположены большинство ИСЗ.
Если рассматривать грубо, от самых близких до самых далеких, то получим следующие типы:
От 100 до 2000 километров — Асинхронные орбиты
Наблюдательные спутники обычно располагаются на
высотах от 480 до 970 километров, и используются для таких задач как
фотографирование. Наблюдательные спутники типа Landsat 7 выполняют следующие
задачи:
· Картографирование
· Наблюдение за движением льда и песка
· Определение местоположения климатических ситуаций (как например, исчезновение тропических лесов)
· Определение местоположения полезных ископаемых
· Поиск проблем с урожаем на полях
Поисково-спасательные спутники работают как
передающие станции для ретрансляции сигналов бедствия с упавших самолетов или
терпящих бедствия кораблей.
Космические аппараты (например, шаттлы) являются
управляемыми спутниками, как правило, с ограниченным временем полета и рядом
орбит. Космические запуски с участием людей как правило применяются при ремонте
уже существующих спутников или при строительстве космической станции.
От 4 800 до 9 700 километров — Асинхронные орбиты
Научные спутники иногда располагаются на высотах
от 4 800 до 9 700 километров. Они отправляют полученные ими научные данные на
Землю с помощью радио-телеметрических сигналов. Научные спутники применяются
для:
· Изучения растений и животных
· Исследование Земли, как например, наблюдение за вулканами
· Отслеживание дикой природы
· Астрономических исследований, включая инфракрасные астрономические спутники
· Исследований в области физики, как например, исследования NASA в области микрогравитации или исследования солнечной физики
От 9 700 до 19 300 километров — Асинхронные орбиты
Для навигации, американское оборонное ведомство
и российское правительство создали навигационные системы, GPS и ГЛОНАСС
соответственно. Навигационные спутники используют высоты от 9 700 до 19 300
километров, и применяются для определения точного местоположения приемника.
Приемник может располагаться:
· В корабле на море
· В другом космическом аппарате
· В самолете
· В автомобиле
· У вас в кармане
Так как цены на потребительские навигационные
приемники имеют тендецию к снижению, обычные бумажные карты столкнулись с очень
опасным противником. Теперь вам будет сложнее потеряться в городе и не найти
нужную точку.
Интересные факты о GPS:
· Американские войска во время операции «Буря в пустыне» использовали более 9 000 GPS приемников.
· Национальное управление океанических и атмосферных исследований (NOAA) США использовало GPS для измерения точной высоты монумента Вашингтона.
35 764 километров — Геостационарные орбиты
Погодные прогнозы обычно демонстрируют нам
изображения со спутников, которые как правило находятся на геостационарной
орбите на высоте 35 764 километра над экватором. Вы можете получить напрямую
некоторые такие изображения с помощью специальных приемников и компьютерного
программного обеспечения. Многие страны используют погодные спутники для
предсказания погоды и наблюдения за штормами.
Данные, телевизионные сигнал, изображения и
некоторые телефонные звонки аккуратно принимаются и ретранслируются
коммуникационными спутниками. Обычные телефонные звонки могут иметь от 550 до
650 миллисекунд задержки на прохождение сигнала туда и обратно, что приводит к
неудовольствию пользователя. Задержка возникает из-за того, что сигнал должен
дойти вверх до спутника и затем вернуться на Землю. Поэтому из-за такой
задержки, многие пользователи предпочитают пользоваться спутниковой связью
только в том случае, если нет других вариантов. Однако, VOIP (голос через
интернет) технологии встречаются сейчас с похожими проблемами, только в их
случае они возникают из-за цифровой компрессии и ограничений пропускной
способности, нежели из-за растояния.
Коммуникационные спутники являются очень важными
ретрансляционными станциями в космосе. Спутниковые тарелки становятся меньше,
потому что спутниковые передатчики становятся более мощными и направленными. С
помощью таких спутников передаются:
· Новостные ленты агентств
· Биржевая, бизнес и другая финансовая информация
· Международные радиостанции переходят с коротковолнового (или дополняют его) спутниковым вещанием с использованием микроволнового восходящего сигнала
· Глобальное телевидение, такое как CNN и BBC
· Цифровое радио
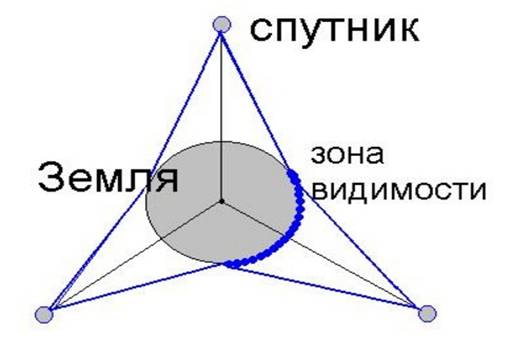
Зоны видимости ИСЗ
Понятие зоны видимости ИСЗ, под которым следует понимать часть поверхности Земли, с которой ИСЗ веден под углом места больше некоторой минимально допустимой величины (например 5°) в течении в заданной длительности сеанса связи; под мгновенной зоной видимости понимается зона видимости в определенный момент, т.е. при нулевой длительности сеанса связи. При движении ИСЗ мгновенная зона перемещается, и поэтому зона видимости в течении некоторого времени всегда меньше мгновенной, так как представляет собой внутреннюю огибающую мгновенных зон.
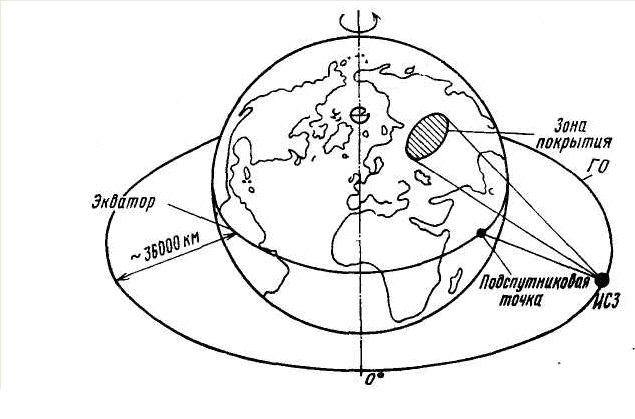
Зона покрытия спутника — часть поверхности земного шара (или часть зоны видимости), в пределах которой обеспечивается уровень сигналов от спутника, необходимый для их приема с заданным качеством, а также гарантируется способность приема на входе ИСЗ сигналов от земной станции, обладающей определенными параметрами.
ЗОНА ПОКРЫТИЯ зависит от таких параметров как позиция спутника на орбите (необязательно геостационарной), диаграммы направленности транспондеров, и мощности передатчика.
Виды зон покрытия спутника:
· глобальные (вся видимая с ИСЗ часть поверхности Земли при малой неравномерности усиления бортовой антенны. Ширина луча антенны ИСЗ при этом составляет 17,4° для угла прихода 0°);
· полуглобальные;
· зональные.
Рассмотрим спутник на геостационарной орбите, высота которой составляет 36000 км. А проекция орбиты проходит над экватором. ( Рис. 1)
 (zip - application/zip)
(zip - application/zip)









