












Содержание
Введение
5
1.1 Назначение и устройство механизма 6
1.2 Требование к электроприводу
6
1.3 Исходные данные для проектирования 7
1.4 Выбор типа крана
7
2.1 Расчёт циклограммы
7
2.2 Предварительный расчет мощности и выбор двигателя 8
2.3 Выбор типа редуктора
10
2.4 Проверка двигателя
11
2.4.1 Проверка по нагреву
11
2.4.2 Проверка по допустимой перегрузке 14
2.4.3 Проверка по надежности пуска 14
2.4.4 Проверка по допустимому ускорению 14
2.5 Расчёт пусковых сопротивлений 15
2.6 Построение естественной и искусственных механических характеристик 16
2.7 Расчёт переходных процессов 18
2.8 Обоснование и выбор схемы управления 20
2.9 Выбор основного электрооборудования крана 20
2.9.1 Выбор силового кулачкового контроллера 20
2.9.2 Выбор реле максимального тока 21
2.10 Расчёт главных троллеев
21
3.1 Техника безопасности при эксплуатации электрооборудования
мостового крана
22
3.2 Заземление мостовых кранов 23
Литература
23
Введение
Одной из важных задач развития народного хозяйства является внедрение комплексной механизации и автоматизации производственных процессов, неуклонное сокращение во всех отраслях численности работников занятых ручным трудом, особенно на вспомогательных и подсобных работах.
Значительная роль в решении этих задач принадлежит подъёмно-транспортным механизмам. Существенное сокращение тяжелого труда при погрузо-разгрузочных работах осуществляется путём автоматизации грузозахватных операций, а также автоматизация процессов управления подъёмно-транспортными механизмами. Так как эти задачи решаются с помощью электрического привода, то значение совершенствования и внедрения современных электрических приводов постоянно возрастает.
Первостепенное значение для автоматизации имеет многодвигательный электрический привод и средства электрического управления. Развитие электрического привода идёт по пути упрощения механических передач и приближения электрического двигателя к рабочим органам механизмов, а также возрастающего применения электрического регулирования скорости электрического привода.
Общая часть
1.1 Назначение и устройство механизма
Кранами называются грузоподъемные устройства, служащие для вертикального и горизонтального перемещения грузов на небольшие расстояния.
В цехах промышленных предприятий наибольшее распространение получили мостовые краны, с помощью которых производится подъем и опускание тяжелых заготовок, деталей и узлов машин, а также их перемещение вдоль и поперек цеха.
Тележка с подъемной лебедкой перемещается на колесах, приводимых во вращение электродвигателем через редуктор, по рельсам, проложенных вдоль моста.
Для подвода питания к электрооборудованию, размещенному на тележке, служат вспомогательные троллеи, идущие вдоль моста.
Так как двигатели обычно имеют угловую скорость, значительно большую, чем скорость ходовых колес тележки, то движение к рабочим органам тележки передается через редукторы.
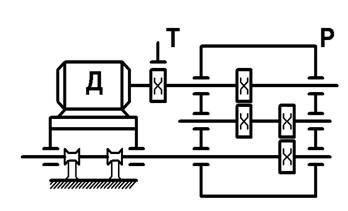
Рис.1 Кинематическая схема тележки
1.2 Требования к электроприводу
Для выбора системы электропривода необходимо четко представлять технологические требования к приводу того механизма, для которого он выбирается.
Для качественного выполнения перемещения грузов электрический привод мостовых кранов должен удовлетворять следующим основным требованиям :
1. Регулирование угловой скорости двигателя в сравнительно широких пределах.
2. Обеспечение необходимой жесткости механической характеристики привода.
3. Ограничение ускорений до допустимых пределов при минимальной длительности переходных процессов.
4. Реверсирование электропривода и обеспечение его работы, как в двигательном, так и в тормозном режиме.
1.3 Исходные данные для проектирования
Номинальная грузоподъемность: Gн = 16т
Размеры пролета: длина L = 24м
Ширина B = 24 м
Высота Н = 10 м
Мостовой кран предназначен для выполнения вспомогательных работ.
1.4 Выбор типа крана
Для выполнения погрузо-разгрузочных работ и периодического перемещения груза в цехе наибольшее применение находят мостовые краны общего назначения режимной группы 5К. На основании исходных данных по таблице 5. 2. 5 (2) выбираются технические данные крана:
Номинальная
грузоподъемность  =
21,7 т
=
21,7 т
Вес тележки
 =3,7 т
=3,7 т
Скорость
передвижения моста  =
75 м/мин
=
75 м/мин
Скорость передвижения тележки  = 38 м/мин
= 38 м/мин
Скорость подъема
 = 9,6 м/мин
= 9,6 м/мин
Длина моста
 = 22,5 м
= 22,5 м
Ширина моста
 = 5,6 м
= 5,6 м
Ширина тележки
 = 2 м
= 2 м
Высота подъема
 = 0,8 м
= 0,8 м
Диаметр ходового
колеса тележки  =
350 мм
=
350 мм
2.1 Расчет циклограммы
Расчет циклограммы производится для определения режима работы проектируемого механизма. Режим работы определяется по величине времени цикла, для расчета которого необходимо определить время работы всех механизмов с грузом и без груза.
1. Определяем время работы механизмов.
При работе механизмов с грузом и без груза время работы принимается одинаковым.
а) механизма моста


 ;
;
б) механизма тележки
 ;
;
в) механизма подъема
 .
.
2. Принимаем время зачаливания и расчаливания груза
 .
.
3. Определяем время цикла

 .
.
 мин < 10 мин, следовательно,
режим работы механизмов повторно – кратковременный.
мин < 10 мин, следовательно,
режим работы механизмов повторно – кратковременный.
4. Расчетное значение продолжительности включения для проектируемого механизма составит
 ;
;
 =
= .
.
Принимаем номинальное значение ПВн = 25%, режим работы «С».
5. Определяем время паузы
 .
.
2.2 Предварительный расчет мощности и выбор двигателя
Для механизма, работающего в повторно-кратковременном режиме, мощность двигателя определяется по расчетной эквивалентной мощности.
Для определения этой мощности необходимо рассчитать статистические мощности, возникающие на валу двигателя при работе механизма:
а) с грузом

 ,
,
где  и
и  - номинальная
грузоподъемность и вес тележки, Н
- номинальная
грузоподъемность и вес тележки, Н  - коэффициент запаса, учитывающий увеличение
сопротивления
- коэффициент запаса, учитывающий увеличение
сопротивления
движению из-за трения реборд ходовых колес о рельсы, м
 - скорость
передвижения тележки м/с
- скорость
передвижения тележки м/с
 ,
,  - радиусы ходового колеса и цапфы ходового колеса, м
- радиусы ходового колеса и цапфы ходового колеса, м
Диаметр цапфы принимается равным:
 =
= ;
;
 ,
, - коэффициенты трения в опорах и тр ения качения ходовых колес;
- коэффициенты трения в опорах и тр ения качения ходовых колес;
 ,
,

 - КПД механизима тележки; = 0,7
- КПД механизима тележки; = 0,7
 ;
;
б) без груза

 .
.
По полученным данным строится циклограмма  (Рис. 2)
(Рис. 2)

Рис.2. Циклограмма
Определяем расчетную эквивалентную мощность:

 ;
; ,
,
По каталогу предварительно выбираем двигатель по условию
 ,
,
где  – коэффициент запаса, учитывающий дополнительную
загрузку
– коэффициент запаса, учитывающий дополнительную
загрузку
двигателя
в периоды пуска;  (1)
(1)
Расчётная мощность составит:
 .
.
При грузоподъемности более 10 тонн целесообразно принимать асинхронные двигатели с фазным ротором краново-металлургической серии. Данная серия имеет более высокий класс изоляции, что обеспечивает более надежную работу двигателя при частых пусках.
Выбираем двигатель типа MTF 012–6 (2)
Технические данные двигателя:







2.3 Выбор типа редуктора
Редуктор выбирается следующим условиям:
1. По мощности редуктора на быстроходном валу
 ,
,
где  - коэффициент, зависящий от назначения и режима
работы механизма.
- коэффициент, зависящий от назначения и режима
работы механизма.
Для механизма тележки при режиме «Л» 
 – наибольшая
статическая мощность на валу двигателя, кВт
– наибольшая
статическая мощность на валу двигателя, кВт

2. По значению передаточного числа


 ,
,
где  - номинальная частота вращения двигателя, об/мин
- номинальная частота вращения двигателя, об/мин
 - частота вращения
ходовых колёс, об/мин
- частота вращения
ходовых колёс, об/мин
 =
=
 .
.
Выбираем
горизонтальный редуктор типа:
РМ – 500
Nр = 11,6; кВт
 =
48,57
=
48,57
2.4 Проверка двигателя
Выбранный двигатель необходимо проверить по условиям нагрева, допустимой перегрузки, пуска и допустимого ускорения.
2.4.1 Проверка по нагреву
Двигатель механизма тележки работает в повторно-кратковременном режиме. По его обмоткам протекают пусковые токи, вызывающие быстрое старение изоляции, поэтому проверка по нагреву является основной.
Для этой проверки необходимо рассчитать статические моменты, возникающие на валу двигателя, а также время пуска и торможения.
Определяем статические моменты, возникающие на валу двигателя при работе:
а) с грузом
 ;
;
б) без груза

 ;
;
Номинальный момент двигателя:
 ;
;
Средний пусковой момент:
 ,
,
где  и
и  - соответственно кратности максимального и
минимального моментов;
- соответственно кратности максимального и
минимального моментов;
для асинхронных двигателей с фазным ротором



Принимаем средний тормозной момент
 ;
;
Определяем суммарный момент инерции:
 ,
,
где  - коэффициент, учитывающий момент инерции шестерен
редуктора и
- коэффициент, учитывающий момент инерции шестерен
редуктора и
тормозных
дисков;  (1)
(1)
 - момент инерции двигателя,
- момент инерции двигателя, 

 ;
;
 - суммарная масса поступательно движущихся частей
механизма; кг
- суммарная масса поступательно движущихся частей
механизма; кг
 ,
,
 - угловая скорость
двигателя
- угловая скорость
двигателя

 ;
;
 .
.
Определяем время пуска и торможения при работе:
а) с грузом
 ;
;
 ;
;
б) без груза
 ;
;
 .
.
Определяем средний путь, проходимый механизмом за время пуска и торможения при работе:
а) с грузом

 ;
;
 ,
,
б) без груза
 ;
;
 .
.
Определяем время движения механизма с установившейся скоростью при работе:
а) с грузом
 ;
;
б) без груза
 .
.
По полученным данным строится нагрузочная диаграмма Мс = ƒ(t)
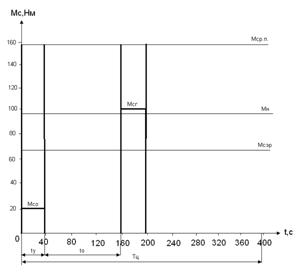
Рис.3. Нагрузочная диаграмма Мс = ƒ(t)
Определяем эквивалентный расчётный момент:

 ;
;
т.к.
 , следовательно,
двигатель по нагреву подходит.
, следовательно,
двигатель по нагреву подходит.
2.4.2 Проверка по допустимой перегрузке
Кратковременные перегрузки могут возникать при снижении напряжения в питающей сети.
Для
крановых двигателей допустимое снижение напряжения 
Условия проверки:

 .
.
Следовательно, двигатель удовлетворяет требованиям допустимой перегрузки.
2.4.3 Проверка по надежности пуска
Правильно выбранный двигатель должен обеспечивать надежный разгон привода, для чего требуется выполнение соотношения:
 ,
,
где М1 и М2 – максимальный и минимальный моменты двигателя при пуске.
2.4.4 Проверка по допустимому ускорению
Двигатель удовлетворяет требования допустимого ускорения, если соблюдается соотношение:

для механизма передвижения
 ,
,
Максимальное допустимое ускорение тележки определяется:
 ,
,
где  - число приводных ходовых колёс;
- число приводных ходовых колёс; 
 - общее число ходовых колёс;
- общее число ходовых колёс; 
 -коэффициент сцепления ходовых колёс с рельсами;
-коэффициент сцепления ходовых колёс с рельсами; 
К -коэффициент запаса
сцепления; К= 
g-
ускорение свободного падения; g =  м/с2
м/с2
 ;
;
 .
.

Расчет пусковых сопротивлений производится графоаналитическим методом.
Для этого необходимо рассчитать и построить рабочую ветвь естественной механической характеристики, которая строится по двум точкам:
1 точка  ,
, 
2 точка  ,
,  ,
,
где  ;
;
 .
.
Для построения пусковой диаграммы вместо значений моментов принимаются их кратности:
Номинального
момента 
Статического
момента 
Переключающего
момента 
Пикового
момента  ,
,
где  - кратность
пикового момента
- кратность
пикового момента
 ,
,
где m – число ступеней сопротивления в цепи ротора;
для крановых двигателей m = 5
=  ;
;
Пиковый момент
 .
.
По полученным данным строится пусковая диаграмма
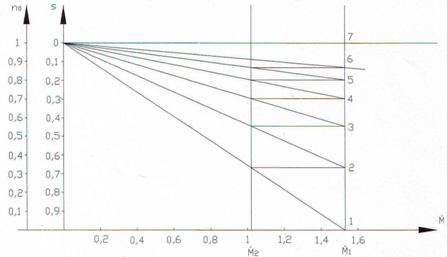
Рис.4. Пусковая диаграмма
Определяем сопротивление фазы ротора:
 ;
;
Определяем сопротивление каждой ступени:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
Сопротивление фазы ротора для каждой ступени
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Построение механических характеристик выполняется на основании формулы Клосса
При построении используются кратности максимального и текущего значения.
Кратность максимального момента

Критическое скольжение

Искусственные механические характеристики строятся с учетом введения добавочного активного сопротивления в цепь ротора. При этом кратность максимального момента остается неизменной, а величина критического скольжения изменяется и для каждой ступени сопротивления вводимого в цепь ротора определяется по формуле:
Расчет производится для текущих значений скольжения S=0÷1 с интервалом 0,05, поэтому эти расчеты целесообразно производить с помощью компьютера по программе «Excel».
Данные расчета приведены в таблице 1.
|
Mmax |
56 |
||||||||||
|
Sн |
0,215 |
RHP |
0,503 |
Ri1 |
3,45 |
0,808 |
|||||
|
n0 |
1000 |
Ri2 |
2,63 |
0,5153 |
|||||||
|
Skp |
0,55 |
Ri3 |
1,99 |
0,3435 |
|||||||
|
Ri4 |
1,53 |
0,229 |
|||||||||
|
Ri5 |
1,21 |
0,159 |
|||||||||
|
S |
0,00 |
0,10 |
0,180 |
0,30 |
0,400 |
0,50 |
0,60 |
0,70 |
0,80 |
0,90 |
1,00 |
|
M |
0,00 |
108,75 |
163,228 |
190,60 |
186,34 |
173,44 |
158,62 |
144,44 |
131,72 |
120,58 |
110,89 |
|
Sи5 |
0,00 |
0,10 |
0,180 |
0,30 |
0,40 |
0,50 |
0,60 |
0,70 |
0,80 |
0,90 |
1,00 |
|
Mu5 |
0,00 |
172,13 |
189,546 |
158,09 |
131,15 |
110,35 |
94,61 |
82,53 |
73,06 |
65,46 |
59,26 |
|
Sи4 |
0 |
0,1 |
0,180 |
0,3 |
0,4 |
0,5 |
0,6 |
0,70 |
0,8 |
0,9 |
1 |
|
Mu4 |
0,00 |
140,09 |
185,590 |
184,25 |
164,72 |
144,63 |
127,27 |
112,90 |
101,08 |
91,30 |
83,13 |
|
Sи3 |
0 |
0,1 |
0,180 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1 |
|
Mu3 |
0,00 |
102,51 |
157,040 |
189,26 |
188,81 |
178,29 |
164,72 |
151,08 |
138,50 |
127,27 |
117,38 |
|
Sи2 |
0 |
0,1 |
0,180 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,000 |
|
Mu2 |
0,00 |
71,44 |
118,924 |
166,10 |
185,03 |
190,91 |
188,81 |
182,38 |
173,90 |
164,72 |
155,54 |
|
Sи1 |
0 |
0,1 |
0,180 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,000 |
|
Mu1 |
0,00 |
46,57 |
81,080 |
124,65 |
151,89 |
170,94 |
182,84 |
189,05 |
190,99 |
189,89 |
186,74 |
Таблица 1. Данные расчетов механических характеристик
Рис.5 График естественной и искусственных механических характеристик
2.7 Расчет переходных процессовРасчет переходных процессов заключается в определении времени закорачивания каждой ступени сопротивления регулировочного реостата.
Время закорачивания первой ступени определяется по формуле:
 ,
,
где – момент инерции двигателя, кг/м2
 - кратности частоты
вращения ротора на соответствующих ступенях
- кратности частоты
вращения ротора на соответствующих ступенях
сопротивления.
 - кратности
максимального и минимального динамических
- кратности
максимального и минимального динамических
моментов.
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Время закорачивания последующих ступеней определяется по следующим соотношениям:
 ;
;
 ;
;
 ;
;
 .
.
По полученным данным строятся графики переходных процессов (Рис.6)
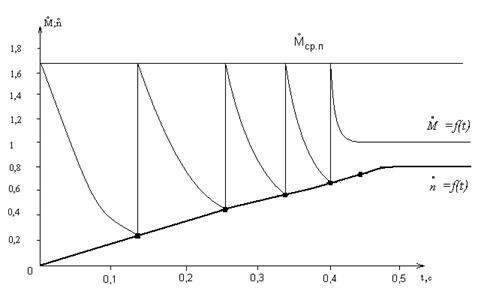
Рис.6. Графики переходных процессов
2.8 Обоснование и выбор схемы управления
Выбор схемы управления определяется принятым типом аппарата управления.
Для привода проектируемого механизма используются двигатель, работающий в режиме «Л». При мощности двигателя до 30 кВт управление двигателем целесообразно осуществлять с помощью силового кулачкового контроллера, с помощью которого выполняется пуск, остановка, регулирование частоты вращения и реверс. Такая схема управления называется контроллерной.
Кулачковый контролер устанавливается в кабине крановщика. Приводным органом кулачкового контроллера является рукоятка, каждое положение которой имеет фиксацию.
Для защиты от КЗ и перегрузок применяется реле максимального тока с втягивающимися катушками типа РЭ – 570.
Для предотвращения переходов механизмов тележки предельно допустимых, а также блокировки открывания люка кабины используются конечные выключатели.
Для механизма передвижения используются конечные выключатели с самовозвратом в исходное положение типа КУ- 701.
Для защиты от понижения напряжения применяются контакторы.
2.9 Выбор основного электрооборудования крана
Электрооборудование крана выбирается в соответствии и в том количестве как это требуется по схеме управления.
2.9.1 Выбор силового кулачкового контроллера
Кулачковые контроллеры выбираются по следующим условиям:
1) По назначению механизма, типу и числу двигателей
2) По числу рабочих положений рукоятки контролера
3) По наибольшему пусковому току

Для передвижения тележки применяется асинхронный двигатель с фазным ротором.
При числе ступеней сопротивления m= 5, число рабочих положений должно равно пяти.
Определяем пусковой ток двигателя
 ;
;
Выбираем силовой кулачковый контроллер типа ККТ- 61А (2)

2.9.2 Выбор реле максимального тока
Реле максимального тока выбирается по току втягивающей катушки:

Выбираем ток втягивающей катушки:

Выбираем реле типа РЭ-570
2.10 Расчет главных троллеев
В производственных помещениях с нормальной средой токопровод к кранам выполняется жесткими троллеями из уголковой стали
По условиям механической прочности размеры уголка находятся в пределах 50х50х5 (75х75х10).
Для двигателей работающих в повторно-кратковременном режиме сечение троллеи выбираются по расчетному току.
Таблица 2. Технические данные двигателей мостового крана
|
Наименование механизма |
Тип двигателя |
Рн, кВт |
Iн, А |
ПВн % |
при ПВн=25% |
|
|
Рн, кВт |
Iн, А |
|||||
|
Мост |
МТF211 - 6 |
9 |
24 |
15 |
9 |
24 |
|
Тележка |
МТF012 - 6 |
3,1 |
10,4 |
15 |
2,7 |
8,9 |
|
Подъем |
МТН511 - 10 |
36 |
98 |
60 |
45 |
112 |
|
Итого |
56,7 |
Расчетная мощность составит:
 ,
,
где  и
и  – коэффициенты, учитывающий режим работы (1)
– коэффициенты, учитывающий режим работы (1)



Расчетный ток:
 ,
,
где  средний коэффициент
мощности для крановых двигателей.
средний коэффициент
мощности для крановых двигателей.
Выбираем уголок с размерами 50х50х5

Выбранный уголок необходимо проверить по потери напряжения при протекании по ним максимального тока:
 ,
,
где  – кратность пускового тока при выборе троллеев;
– кратность пускового тока при выборе троллеев; 
 - номинальный ток наибольшего по мощности двигателя
при
- номинальный ток наибольшего по мощности двигателя
при  ;
;
 суммарный
номинальный ток остальных двигателей, при ;
суммарный
номинальный ток остальных двигателей, при ;

Расчетная потеря напряжения составит:
 ,
,
где  фактическая длина перемещения крана;
фактическая длина перемещения крана;

m – коэффициент определяемый по таблице в зависимости от размеров
уголка и значении 


Следовательно для снижения потери напряжения троллеи целесообразно подключить в середину пролета, тогда:

3.1 Техника безопасности при эксплуатации электрооборудования мостового крана
Электрооборудование мостовых кранов выполняется и эксплуатируется в соответствии с «Правилами устройства и безопасной эксплуатации грузоподъемных кранов». Рабочее напряжение 380В.
Для защиты питающих проводов и электродвигателей от токов к.з. и значительных перегрузок (выше 225%) на кранах предусматривается максимальная токовая защита с помощью реле максимального тока или автоматических выключателей. Плавкие предохранители используют только для защиты цепей управления. Для предотвращения самозапуска двигателей, т.е. самопроизвольного пуска их при восстановлении напряжения сети после перерыва в электроснабжении, в электрических схемах кранов используют совместно с «нулевой» защитой блокировку нулевой позиции контроллеров. Для безопасности обслуживания электрооборудования люк для выхода из кабины на мост снабжается конечным выключателем, снимающим напряжение со вспомогательных троллеев при открывании люка. Все токоведущие части в кабине крана полностью ограждаются. Механизмы кранов оснащаются тормозами замкнутого типа с электромагнитами, которые автоматически растормаживают механизм при включении и затормаживают его при отключении двигателя. Металлоконструкции кранов и все металлические части электрооборудования, которые могут оказаться под напряжением из-за порчи изоляции, должны быть заземлены. Соединение с контуром заземления цеха осуществляется через подкрановые пути.
3.2 Заземление мостовых кранов
Согласно ПУЭ для обеспечения безопасности людей все металлические части электрооборудования крана, по которым нормально ток не проходит, должны быть заземлены.
При монтаже электрооборудования мостовых кранов заземляются: корпуса электродвигателей; кожухи всех аппаратов; стальные трубы, в которых проложены провода; сетки, ограждающие панели; каркасы пусковых и регулировочных резисторов; кожухи контроллеров и т.д. Корпуса отдельных электроаппаратов и машин, например: защитной панели, командоконтроллеров, электродвигателей - при помощи заземляющих проводников присоединяются к магистрали заземления, которая соединяется с металлоконструкциями крана.
Заземление металлоконструкций мостовых кранов выполняется через подкрановые пути и ходовые колеса. Стыки рельсов должны быть надежно соединены перемычками или сваркой, образуя при этом непрерывную электрическую цепь.
Присоединение заземляющего провода к рельсовым путям крана должно выполняться при помощи сварки, а присоединение к корпусам электродвигателей, аппаратов при помощи болтовых соединений, обеспечивающих надежный контакт.
Литература
1. Зимин Е.Н. Электрооборудование промышленных предприятий и установок. –М.: Энергоиздат, 1981. – 544с.
2. Справочник. Крановое оборудование/ под ред. А.А. Рабиновича. – М.: Энергия, 1979. – 238с
3. Справочник по проектированию подъемно-транспортных машин/ под ред. Ф.Л. Марон. – Минск.: Высшая школа, 1977. –272с.
4. Справочник по расчету электрооборудования и сетей/ под ред. –В.И. Круповича – М.: Энергоиздат, 1981. – 406с.
5. А.Б. Перницкий, А.П. Шабашов. Мостовые краны общего назначения. – М.: Машигиз, 1961 – 542с.
 (zip - application/zip)
(zip - application/zip)









