











Содержание
Задание I . 2
1.Синтез, структурное и кинематическое
исследование
механизма поршневого двигателя 4
1.1. Проектирование кривошипно-ползунного механизма 4
1.2. Структурное исследование механизма 4
1.3. Построение схемы механизма 4
1.4. Построение планов скоростей механизма 5
1.5. Построение планов ускорения механизма 6
1.6. Годограф скорости центра масс S2 звена 2 7
1.7. Кинематические диаграммы точки В ползуна 3
8
2.Силовой расчет рычажного механизма
двигателя 9
2.1 .Определение сил давления на поршень 9
2.2.Определение сил тяжести звеньев 9
2.3.Определение сил инерции звеньев 9
2.4. Силовой расчет звеньев 2 и 3 9
2.5. Силовой расчет входного звена 10
2.6.
Силовой
расчет по методу Жуковского Н.Е. 10
3 .Расчет маховика
12
3.1.Построение диаграмм приведенных моментов, работ
и приращений кинетической энергии 12
3.2.Построение диаграммы кинетической энергии. Определение момента
инерции маховика!
13
3.3. Определение размеров и массы маховика 14
Литература
16
Задание № 3. Механизм двухтактного
Двигателя внутреннего сгорания.
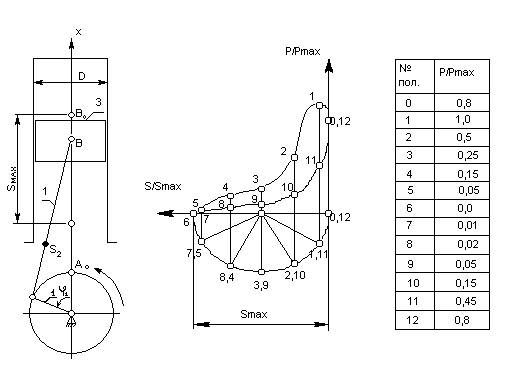
λ=lAB/lOA;
m1=3кг;
AS2=0,3AB;
Pmax=4МПа.
Исходные данные для проектирования и исследования
Механизмов двухтактного двигателя внутреннего
сгорания
|
Параметр |
Обозначение |
Величина |
||
|
параметра |
Единицы СИ |
|||
|
Длина кривошипа ОА |
LOA |
м |
0,04 |
|
|
Угловая скорость вращения кривошипа ОА |
ω1 |
С-1 |
380 |
|
|
Отношение длины шатуна АВ к длине кривошипа ОА |
λ |
4,0 |
||
|
Номера положений механизма для построения планов ускорений ший ДЛЯ анов |
2,5,11 |
|||
|
Диаметр поршня |
D |
М |
0,095 |
|
|
Масса кривошипа ОА |
m |
кг |
10 |
|
|
Масса шатуна АВ |
m2 |
кг |
3,3 |
|
|
Масса ползуна 3 |
m3 |
кг |
2,2 |
|
|
Моменты инерции звеньев относительно осей, проходящих через центры масс: |
J01 JS2 |
кгм2 кгм2 |
0,14 0,025 |
|
|
Максимальное давление . |
Pma |
МПа |
1 |
|
|
Положение механизма для силового расчета |
||||
|
Коэффициент неравномерности движения механизма ма |
δ |
0,04 |
||
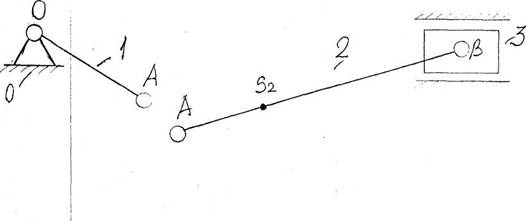
Синтез, структура и кинематическое исследование рычажного
механизма.
1.1.Проектирование кривошипно-ползунного механизма.
Определяем длину шатуна АВ
lAB=λ·lOA=4,0·0,04=0,16м
1.2.Структурное исследование рычажного механизма
Определяем степень подвижности механизма.
W=3n-2p5-p4=3;3-2-4-0=l
где п=3 - число подвижных звеньев
р5=4 - число кинематических пар пятого класса
р4=о _ число кинематических пар четвертого класса
Определяем класс и порядок механизма. Он состоит из группы Ассура II
класса, второго вида, второго порядка и механизма I класса, состоящего из
входного звена 1 и стойки 4. в целом рассматриваемый механизм II класса.
|
|
|
о |
1.3.Построение схемы механизма.
Масштаб схемы
μ1=lOA/OA=0,04/30=0,001м/мм
Для построения 12 положений звеньев разделим траекторию описываемую т.А кривошипа ОА на 12 равных частей. За нулевое принимаем то положение кривошипа ОА,! при котором т.В ползуна 3 занимает крайнее верхнее
положение (т.е. начало рабочего хода).
Из отмеченных на окружности точек
А0, А1, А2…А11 раствором циркуля равным AB=lAB/μ1=0,16/0,001=160мм
Намечаем на линии движения ползуна 3 точки В0, В1, В2…В11. Соединяем прямыми точки A0 c B0, A1 c B1 и т.д. Получаем 12 положений звеньев механизма.
1.4Построение планов скоростей механизма.
План скоростей группы Ассура II класса 2-го вида (звенья 2 и 3)
VB=VA+VBA
где VA –скорость т. А кривошипа ОА.
VA=lOA·ω1=0,04·380=15,2 м/с
VB- скорость т.В ползуна 3, направлена вдоль оси ОВ.
Масштаб планов скоростей
μV=VA/pa=15,2/112,5=0,1(м/с)/мм
Скорость т.S2 определяем по правилу подобия
as2/ab=AS2/AB=> as2=ab·AS2/AB=ab·0,3AB/AB=0,3ab.
Истинное значение скорости каждой точки:
VB=μV·pb=0,1·110=11м/с
VBA=μV·ba=0,1·57=5,7м/с
VS2=μV·ps2=0,1·109=10,9м/с
Определяем угловую скорость шатуна АВ
ω2=VBA/lAB=15,2/0,16=95c-1
Полученные значения сводим в таблицу 1
Таблица 1
Значения скоростей точек и угловой скорости шатуна АВ механизма.
|
Пара метр |
i Номера положений |
|||||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
|
VA |
15,2 |
15,2 |
15,2 |
15,2 |
15,2 |
15,2 |
15,2 |
15,2 |
15,2 |
15,2 |
15,2 |
15,2 |
|
VB |
0 |
9,3 |
14,9 |
15,2 |
11,2 |
6,0 |
0 |
6,0 |
11,2 |
15,2 |
14,9 |
9,3 |
|
VBA |
15,2 |
13,4 |
6,8 |
0 |
6,8 |
13,4 |
15,2 |
13,4 |
6,8 |
0 |
6,8 |
13,4 |
|
VS2 |
95 |
83,7 |
42,5 |
0 |
42,5 |
83,7 |
95 |
83,7 |
42,5 |
0 |
42,5 |
83,7 |
|
ω2 |
10,6 |
12,2 |
14,8 |
15,2 |
13,7 |
11,8 |
10,6 |
11,8 |
13,7 |
15,2 |
14,8 |
12,2 |
1.5.Построение планов ускорений механизма.
Ускорение т.А звена OA
аА = ω2 · l0А = 3802 · 0,04 = 5776 м/с2 Вектор аA направлен от точки A к точке O. Масштаб планов ускорений
μA = aA/πa=5776/100=57,76 (м/с2)/мм
Строим план звеньев 2 и 3
aB=aA+anBA+arBA
где аB - ускорение точки В, направлено вдоль оси X.
anBA- нормальное ускорение точки В шатуна АВ, направлено от точки В к точке А вдоль оси АВ.
anBA=ω22·lBA=42,52·0,16=289м/с2
Его масштабная величина равна пВА=аnBA / μa=289/57,76=5 мм
aτBA- касательная ускорения т.В шатуна АВ, направлено перпендикулярно оси
АВ.
Ускорение т. S2 определяем по правилу подобия
as2 /ab =AS2/AB=>as2=ab·AS2/AB=0,3ab
Численные значения ускорений точек равны
aB=μa·πb=57,76·37=2137 м/с2
aτBA=μa·τBA=57,76·87=5025 м/с2
as2=μa·πs2=57,76·63=3638 м/с2
Определяем угловое ускорение шатуна АВ.
ε2=aτBA / lAB=5025/0,16=31406 с-2
Полученные значения сводим в таблицу 2 .
Таблица 2 Значенияускорений точек иуглового ускоренияшатуна АВ
|
Параметр |
aA |
anBA |
aτBA |
aS2 |
ab |
ε2 |
|
2 |
5776 |
289 |
2137 |
3638 |
5025 |
31406 |
|
5 |
5776 |
1120 |
4274 |
2021 |
2714 |
26712 |
|
11 |
5776 |
1120 |
5718 |
2021 |
2714 |
35737 |
1.6. Годограф скорости центра масс S звена 2
Соединяем концы векторов ps2 плавной кривой и получаем годограф скорости t.S2.
1.7.Кинематические диаграммы ползуна 3.
Диаграмма перемещения. Откладываем по оси абцисс отрезок х=120 мм и делим его на 12 равных частей. От точек 1,2,... 11 диаграммы S(t)
откладываем ординаты 1-1, 2-2,... 11-11, соответственно равные расстояния В0-Вi, В0-В2, ...В0-В11. Соединяем полученные точки.
Масштабы диаграммы
μs=μ1 =0,001 мм.
μl=2π / ω1·x=2·3,14 / 380·180=0,00009 c/мм.
μφ=2π / x=2·3,14 / 180=0,034 с/мм.
Диаграмма скорости строится графическим дифференцированием диаграммы
перемещения по методу хорд. Масштаб диаграммы V(t)
μV=μs / μl·H2=0,001/0,0013·20=0,038 м/с2(мм)
Диаграмма ускорения строится
графическим дифференцированием
диаграммы скорости по методу хорд. Масштаб диаграммы a(t).
μa=μV / μl·H2=0,038 / 0,0013·20=1,46 м/с2(мм)
2.Силовой расчет рычажного механизма.
2.1.Определение сил давления газов на поршень
P3=π·D2/4·P/Pmax·Pmax=3,14·0,0952/4·0,5·4000000=28338 H
2.2.Определение сил тяжести звеньев.
G1=m1·g=3·10=30 H
G2=m2·g=3,3·10=33 H
G3=m3·g=2,2·10=22 H
 2.3. Определение сил
инерции звеньев
2.3. Определение сил
инерции звеньев
Ф2=-т2 ·aS2 =3,3·3638= 12005,4 Н
Ф3=m3·aB=2,2·2137= 4701,4 H
Mu2=-IS2·ε2 =0,025·13356= 785 Н·м.
Силу Ф2 прикладываем в t.S2 , силу Ф3 прикладываем в т.В и направляем их параллельно и противоположно соответствующим ускорениям.
Момент от пары сил инерции Ми2 направляем противоположно ускорению ε2 Производим замену силы инерции Fu2 и момента от пары сил инерции Ми2 одной результирующей силой Ф"2. Определяем плечо h"2.
h΄2=Mu2/Ф2·μl=785/12005,4·0,001=65,4мм
2.4. Силовой расчет звеньев 2 и 3
Определяем величину реакции Rτ2 из суммы моментов всех сил действующих на звено 2,
ΣMB(2)=0
Rτ12·AB+Ф2·h1+G2·h=0
Rτ12=Ф2·h1+G2·h2/AB=12005,4·30+33·184/295=1241 H
Реакции Rn12 и R02 определим построением силового многоугольника, решая векторное уравнение равновесия звеньев 2 и 3.Rn12+Rτ12+Ф2+G2+Ф3+G3+P3+R03=0
μP=P3/P3=28338/360=78 H/мм
Rn12=μP·Rn12=78·295=23010 H
R12=μP·R12=78·58=4524 H
R03=μP·R03=78·70=5460 H
Определяем реакцию R32, рассматривая равновесие звена 2
R12+G2+Ф2+R32=0
μP=78 H/мм
R32=μP·R32=78·300=23400 H
Расчет группы 2-3 закончим определением плеча h3.
ΣMB(2)=R3·h3=0
h3=0, так как R03≠0
2.5 Силовой расчет входного звена.
Из уравнения моментов всех сил относительно т.О определяем уравновешивающую силу Py
ΣMO(1)=-Py·OA+R12·h4=0
Py=R12·h4/OA=4524·72/75=4343 H
Определяем реакцию R01 построением многоугольника сил согласно векторному уравнению звена 1.
Py+R21+G1+R01=0
μP=R21/R21=4524/250=18 H/мм
R01=μP·R01=18·90=1620 H
2.6.Силовой расчет по методу Жуковского Н.Е.
Строим для положения 10 в произвольном масштабе план скоростей повернутый на 90˚. В одноименные точки плана переносим все внешние силы, действующие на звенья механизма, включая и силу Ру. Составляем уравнение моментов всех сил относительно полюса P плана скоростей
-Pжy·pa+G2·h6+Ф2·h5+(P3-Ф3)·pb+G3·pb=0
Pжy=G2·h6+Ф2·h5+(P3-Ф3)·pb+G3·pb/pa;
Pжy=33·26-12005·14+(28338-4701)·0+22·90/39,3=4346H
Δ=[Py-Pжy]/Py·100%=4343-4346/4343=0,07%
З.Расчет маховика
З.1 Построение диаграмм приведенных моментов, работ и приращения кинетической энергии.
Определяем приведенный к валу кривошипа 1 момент сил сопротивления без учета сил тяжести звеньев.
_ ^ _ _ ^ _
MCП=P3·VB/ω1·cos(P3,VB), где cos(P,3VB)=cos180˚=-1
Cos(P3,V3)=cos0˚=1
Полученные значения заносим в таблицу 3 и строим по ним диаграмму
MCП=f(φ1) (1) в масштабе μM=[MCПmax]/Ymax=[-512,7]/102,5=5 H·м/мм
Расчетная таблица определения приведенного момента сил давления газов (сопротивления).
|
№ п/п |
P/Pmax |
P3,H |
VB м/с |
_ ^ _ (P3 VB),град |
_ ^ _ cos (P3 VB) |
MCn H·м |
|
0 |
0,8 |
22670 |
0 |
0 |
1 |
0 |
|
1 |
1,0 |
28338 |
9,3 |
0 |
1 |
200 |
|
2 |
0 |
0 |
14,9 |
180 |
-1 |
0 |
|
3 |
0 |
0 |
15,2 |
180 |
-1 |
0 |
|
4 |
0 |
0 |
11,2 |
180 |
-1 |
0 |
|
5 |
0 |
0 |
6,0 |
180 |
-1 |
0 |
|
6 |
0 |
0 |
0 |
180 |
-1 |
0 |
|
7 |
0,01 |
283 |
6,0 |
180 |
-1 |
-5,1 |
|
8 |
0,02 |
566 |
11,2 |
180 |
-1 |
-41,7 |
|
9 |
0,05 |
1416 |
15,2 |
180 |
-1 |
-161,2 |
|
10 |
0,15 |
4250 |
14,9 |
180 |
-1 |
-456,2 |
|
11 |
0,45 |
22670 |
9,3 |
180 |
-1 |
-512,7 |
Масштаб по оси абцисс
μφ=2π/x=2·3,14/180=0,03 1/мм
Методом графического интегрирования диаграммы MCn=f(φ1) (1)
Строим диаграмму работ движения сил сопротивления АД=f(φ1) (2)
В масштабе μA=μM·μφ·H=5·0,034=3,4 Дж/мм
Соединяя начало и конец диаграммы АС=f(φ1) (2) прямой линией получим диаграмму работ движения сил АД=f(φ1) (3).
Методом графического дифференцирования диаграммы АД=f(φ1) (3)
Строим диаграмму постоянного движущих сил МДn=f(φ1)= const (4)
Для построения диаграммы приращения кинетической энергии механизма ΔT=f(φ1) (5)
нужно алгебраически вычесть из ординат диаграммы АД=f(φ1) (2) ординаты диаграммы
АС=f(φ1) (3). Масштаб полученной диаграммы μT=μA=3,4 Дж/мм.
3.2. Построение диаграммы кинетической энергии. Определение момента инерции маховика
Определяем кинетическую энергию звеньев второй группы для всех положений механизма.
T=T2+T3;
Где T2=lS2·ω22/2+m2·V2S2/2
T3=T3пост=m3·V2B/2.
По вычисленным значениям строим диаграмму TП=f(φ1) (6) в масштабе
μТ=1 Дж/мм.
В этом же масштабе на этих же осях перестраиваем диаграмму ΔT΄=f(φ1) (5) и будем обозначать её ΔT΄=f(φ1) (5΄).
Строим диаграмму (7), показывающую изменение кинетической энергии звеньев первой группы. Для чего из ординат диаграммы ΔТ΄=f(φ1) (5΄)
Алгебраически вычитаем ординаты графика TП=f(φ1) (6)
К последней диаграмме проводим две горизонтальные прямые, касающиеся точек с минимальной и максимальной ординатами. Полученный таким образом отрезок АБ определяем максимальное значение кинетической энергии звеньев первой группы.
ΔT1max=μT·(AB)=30·295=8850 Дж
Определяем приведенный момент инерции звеньев первой группы
JП1=ΔTmax/ω21·δ=8850/3802·0,04=1,5 кг·м2
Определяем момент инерции маховика.
JM=JП1-J01=1,5-0,14=1,36 кг·м2
3.3.Определуние размеров и массы маховика.
D=0,38 JM=0,38 1,36 =0,16 м
d=0,15D=0,15·0,16=0,024 м
d1=0,25D=0,25·0,16=0,04 м
b=0,165D=0,165·0,16=0,026 м
b1=1,9b=1,9·0.026=0,23 м
m=8·JM/D2=0,38·1,36/0,232=1,36 кг
Результаты расчетов маховика.
Таблица 4
|
№ п/п |
Мgm Н·м |
Mg/μn мм |
Ag/μA мм |
AC/μC мм |
ΔT/μn мм |
TII/μT мм |
ΔT |
|
0 |
0 |
0 |
21,5 |
21,5 |
0 |
7,4 |
-7,4 |
|
1 |
746 |
37,3 |
9,7 |
1,8 |
7,9 |
7,4 |
-4,2 |
|
2 |
596 |
29,8 |
22,5 |
3,6 |
18,9 |
12,1 |
-0,2 |
|
3 |
316 |
15,8 |
30,2 |
5,4 |
24,8 |
19,1 |
5,4 |
|
4 |
157 |
7,85 |
34,2 |
7,2 |
27 |
19,4 |
12,8 |
|
5 |
27 |
1,35 |
35,6 |
9 |
26,6 |
14,2 |
17,4 |
|
6 |
0 |
0 |
35,6 |
10,8 |
24,8 |
9,4 |
13,3 |
|
7 |
-4,6 |
-0,23 |
35,3 |
12,6 |
22,7 |
7,4 |
6,4 |
|
8 |
-17,4 |
-0,87 |
35 |
14,4 |
21,1 |
9,4 |
9,3 |
|
9 |
-70,2 |
-3,51 |
34 |
16,2 |
17,8 |
7,4 |
13,8 |
|
10 |
-195 |
-9,75 |
31,7 |
18 |
13,7 |
14,4 |
17,1 |
|
11 |
-337 |
-16,85 |
26 |
19,8 |
6,2 |
12,1 |
9,3 |
|
12 |
0 |
0 |
21,5 |
21,5 |
0 |
7,4 |
7,4 |
Литература
1 .Артоболевский И.И. Теория механизмов и машин, М., Наука, 1975. 2.Попов С.А. Курсовое проектирование по теории механизмов и машин, М., Высшая школа, 1996 3.Теория механизмов и машин, методические указания по изучению
дисциплины и выполнению курсового проекта, М., 1989.
4.Уржунцев И.П. Методические указания к курсовому проектированию по
теории механизмов и машин, Пермь, 1998.
 (zip - application/zip)
(zip - application/zip)









