












МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«Югорский государственный университет»
Институт природопользования
Кафедра энергетики
КУРСОВОЙ ПРОЕКТ
по дисциплине "Электрические машины"
на тему
"Проектирование асинхронного двигателя с
короткозамкнутым ротором"
Номер варианта 4
Студент группы ЗБ-2821: Гильманов А.М.
Проверила:
Ст. преподаватель
Дюба Е.А
Ханты-Мансийск
2016 г.
ОГЛАВЛЕНИЕ
Введение
Исходные данные для проектирования
ГЛАВА 1. Методика проектирования асинхронного двигателя с короткозамкнутым ротором
1.1. Выбор главных размеров двигателя.
1.2. Расчёт параметров обмотки статора
1.3. Расчёт параметров воздушного зазора
1.4. Расчёт параметров обмотки ротора.
1.5. Расчёт тока намагничивания
1.6. Расчёт параметров рабочего режима двигателя
1.7. Расчёт активных потерь в двигателе
1.8. Расчёт рабочих характеристик двигателя
1.9. Расчет пусковых характеристик.
Заключение
ПРИЛОЖЕНИЯ
Список литературы
Введение.
Асинхронная машина – бесколлекторная машина переменного тока, у которой отношение частоты вращения ротора к частоте тока в цепи, к которой машина подключена, зависит от нагрузок. Как любая электрическая машина, асинхронная машина обладает свойством обратимости, т.е. может работать как в двигательном, так и генераторном режимах. Однако на практике наибольшее распространение получил двигательный режим работы машины. На сегодняшний день асинхронный двигатель является основным двигателем большинства механизмов и машин. Более 60 % всей вырабатываемой электрической энергии потребляется электрическими машинами, при этом значительную долю в этом потреблении (примерно 75 %) составляют асинхронные двигатели. Достаточно широкое распространение асинхронные двигатели получили благодаря следующим своим достоинствам: небольшие габаритные размеры, простота конструкции, высокая надёжность, высокое значение КПД, относительно низкая стоимость. К недостаткам асинхронного двигателя относят: трудности при регулировании скорости вращения, большие пусковые токи, низкое значение коэффициента мощности при работе машины в режиме близком к холостому ходу. Первый и второй из недостатков могут быть компенсированы применением преобразователей частоты, использование которых расширило область применения асинхронных машин. Благодаря преобразователям частоты асинхронный двигатель широко внедряется в области, где традиционно использовались другие виды электрических машин, прежде всего машины постоянного тока.
Поскольку существующим асинхронным двигателям свойственны ряд недостатков со временем постоянно разрабатываются новые серии асинхронных двигателей, имеющих более высокие технико-экономические показатели по сравнению с предыдущими сериями асинхронных двигателей, лучшие по качественным показателям рабочие и механические характеристики. Кроме этого, часто возникают потребности в разработке и модернизации асинхронных двигателей специального исполнения. К таким двигателям можно отнести:
погружные асинхронные двигатели (ПЭД) применяемые для привода установок электроцентробежных насосов (УЭЦН). Особенность конструкции таких двигателей – ограниченность в размерах наружного диаметра, размеры которого заданы диаметром насосно-компрессорной трубы, в которой двигатель располагается. Кроме этого, двигатель эксплуатируется при достаточно высоких температурах, что приводит к снижению его развиваемой мощности. Указанные обстоятельства требуют разработки специальной конструкции асинхронных двигателей;
двигатели, работающие совместно с частотными преобразователями, которые выполняют функции их регулирования. Поскольку преобразователи частоты приводят к генерации целого спектра гармонических составляющих в кривой напряжения питания двигателя, наличие гармонических составляющих приводит к появлению дополнительных потерь в двигателе и снижению его КПД ниже номинального. Конструкция асинхронного двигателя, работающего совместно с преобразователями частоты должна учитывать данную особенность и наличие в кривой напряжения питания высших гармоник не должно приводить к дополнительным потерям мощности.
Указанный список асинхронных двигателей специального исполнения может быть продолжен, и отсюда можно сделать следующие выводы:
существует необходимость в разработке новых серий асинхронных двигателей;
существует необходимость в освоении существующих методик проектирования асинхронных двигателей для решения указанной выше задачи;
существует необходимость в разработке новых методик проектирования асинхронных двигателей, позволяющих при меньших затратах времени на проектирование разрабатывать новую серию асинхронных двигателей с лучшими технико-экономическими показателями.
Цель выполнения задания на курсовое проектирование – разработка асинхронного двигателя с короткозамкнутым ротором, имеющего заданные параметры, на основе существующей и широко применяемой на практике методике проектирования асинхронных двигателей.
Исходные данные для проектирования.
Разрабатываемый асинхронный двигатель с короткозамкнутым ротором должен иметь следующие паспортные данные:
1. Номинальное (фазное) напряжение питания U1нф, В;
2. Частота напряжения питания сети f1, Гц;
3. Число фаз напряжения питания m1
4. Номинальная мощность Р2, кВт;
5. Синхронная скорость вращения n1, об/мин;
6. Номинальное значение КПД η (не менее), отн. ед.;
7. Номинальное значение коэффициента мощности cos(φ) (не менее), отн. ед.;
8. Конструктивное исполнение;
9. Исполнение по способу защиты от воздействия окружающей среды;
10. Категория климатического исполнения.
|
U1нф, В |
f1, Гц |
m |
Р2, Вт |
n1, об/мин |
η, о.е. не менее |
Cos(φ), о.е. не менее |
|
|
220 |
50 |
3 |
14000 |
1500 |
0,78 |
0,85 |
Конструктивное исполнение – IM1001;
Исполнение по способу защиты от воздействия окружающей среды – IP44;
Категория климатического исполнения – У3.
ГЛАВА 1. Методика проектирования асинхронного двигателя с
короткозамкнутым ротором.
1.1. Выбор главных размеров двигателя.
В первую очередь необходимо определить число пар полюсов проектируемого двигателя:
 ;
;
где: f1 –частота сети, Гц; n1 – частота вращения, об/мин.
|
P |
f1, Гц |
n1,об/мин |
|
|
Расчет |
2 |
50 |
1500 |
После определения числа пар полюсов принимаем высоту оси вращения двигателя hпр, предварительное значение которое определяют по табл.1, 2, 3 для заданных номинальной мощности Р2 и числа пар полюсов 2р в зависимости от исполнения двигателя. Из ряда высот осей вращения (таблица 4) необходимо принять ближайшее к предварительно найденному (по табл. 1,2,3) стандартное значение hст. Согасно ГОСТ 13267-73 определяет стандартные высоты осей вращения независимо от назначения и конструктивного исполнения асинхронных двигателей, поэтому высота оси вращения любого проектируемого двигателя должна быть равна одному из этих значений.
Наружный диаметр статора Da, выбираем из таблицы 4 в зависимости от выбранной оси вращения hст.
|
hпр, м |
hст, м |
Da, м |
|
|
Расчет |
148 |
160 |
0,272 |
Внутренний диаметр статора D в общем случае может быть определен по наружному диаметру двигателя. Допуская, что размеры пазов не зависят от числа пазов в двгателе получаем:

где: kD – коэффициент, характеризующий отношение внутреннего и наружного
диаметров сердечника статора (по табл. 5).
|
D, м |
kD |
Da, м |
|
|
Расчет |
0,180 |
0,66 |
0,272 |
Полюсное деление двигателя τ находим из соотношения:
 ;
;
|
t, м |
D, м |
Р |
|
|
Расчет |
0,1410 |
0,180 |
2 |
Расчетное значение мощности Р" согласно формуле:
 ;
;
где kE - отношение ЭДС обмотки статора к номинальному напряжению, которое предварительно принимается, по табл. 6, 7, 8; Р2 - мощность на валу двигателя, Вт.
|
Р¢, Вт |
P2, Вт |
h |
cosj |
kE |
|
|
Расчет |
20588 |
14000 |
0,78 |
0,85 |
0,975 |
К электромагнитным нагрузкам машины относят: А – линейную нагрузку, А/м; Вδ– индукцию в воздушном зазоре, Тл. Предварительный выбор электромагнитных нагрузок А и Вδ должен быть проведен особо тщательно, так как они определяют как расчетную длину сердечника, так и практически все характеристики проектируемой машины. Рекомендации по выбору А и Вδ, представлены в табл. 9, 10, 11:
|
А, А/м |
Вδ, Тл |
|
|
Расчет |
33000 |
0,764 |
Определяем значение обмоточного коэффициента kоб1, предварительное значение которого выбирают в зависимости от типа обмотки статора (табл. 12):
|
Kоб1 |
|
|
Расчет |
0,95 |
Находим синхронную угловую скорость вращения вала двигателя Ω по формуле:

здесь n1 - синхронная частота вращения;
|
Ω, рад/с |
n1, об/мин |
|
|
Расчет |
157,08 |
1500 |
Определяем расчетную длину воздушного зазора машины:
 ;
;
где kВ=1,11 - коэффициент формы поля, учитывает уплощение кривой индукции в воздушном зазоре (рис. 1).
|
lδ, м |
Р´, Вт |
kВ |
D, м |
Ω, рад/с |
kоб1 |
A, А/м |
В, Тл |
|
|
Расчет |
0,153 |
20588 |
1,111 |
0,180 |
157,08 |
0,95 |
33000 |
0,764 |
Отношение длины воздушного зазора к полюсному делению λ:
 .
.
|
λ |
lδ, м |
τ, м |
|
|
Расчет |
1,08 |
0,153 |
0,1410 |
Данное отношение должно находится в пределах, показанных в табл.13 для принятого исполнения машины. В случае если λ оказывается слишком большим, то следует повторить расчет для ближайшей из стандартного ряда большей высоты оси вращения h. Если λ слишком мало, то расчет повторяют для следующей в стандартном ряду меньшей высоты h. Для расчета магнитной цепи помимо lδ необходимо определить полученную конструктивную длину и длину стали сердечников статора (l1 и lст1) и ротора (l2 и lст2). В асинхронных машинах, длина сердечников которых не превышает 0,25 – 0,3 м: l1=lδ, lст1=lδ и lст2=lδ.
На этом выбор главных размеров заканчивается. В результате проделанных вычислений получены значения высоты оси вращения h, внутреннего диаметра статора D, наружного диаметра статора Dа, расчетной длины воздушного зазора lδ и полюсного деления τ.
1.2. Расчёт параметров обмотки статора.
В данном параграфе выполняем определение числа пазов статора Z1, числа витков в фазе обмотки статора ω1 и сечения провода обмотки статора. При определении Z1, ω1 необходимо учитывать, что число витков фазы обмотки статора должно быть таким, чтобы линейная нагрузка и индукция в воздушном зазоре как можно более близко совпадали с их значениями, принятыми предварительно при выборе главных размеров, а число пазов статора обеспечивало достаточно равномерное распределение катушек обмотки.
Чтобы выполнить эти условия, вначале выбирают предварительно зубцовое деление t1 в зависимости от типа обмотки, номинального напряжения и полюсного деления машины. В процессе расчета целесообразно не ограничиваться выбором какого-то одного конкретного зубцового деления, а рассмотреть диапазон возможных значений t1 в пределах указанных значений зубцовых делений, предварительно выбираем (по табл. 14).
Диапазон возможных значений зубцового деления статора принимаем по табл. 14:
|
t1max, м |
t1min, м |
|
|
Расчет |
0,014 |
0,012 |
Предварительные числа пазов статора, соответствующие выбранному диапазону t1:
 ;
;
 ;
;
Полученные значения необходимо округлить до целых.
|
D, м |
t1max |
t1min |
Z1min |
Z1max |
|
Расчет |
0,180 |
0,014 |
0,012 |
40 |
47 |
Окончательное число пазов статора Z1.
Выбираем Z1 в полученных пределах с учетом условий, налагаемых требованиями симметрии обмотки (табл. 15). Число пазов статора в любой обмотки асинхронных машин должно быть кратно числу фаз, тогда, значения числа пазов на полюс и фазу q (в большинстве асинхронных машин должно быть целым):
 .
.
|
Z1 |
P |
m |
Q |
|
Расчет |
48 |
2 |
3 |
4 |
Окончательное значение зубцового деления статора t1.
Зубцовое деление не должно выходить за указанные выше пределы более чем на 10% и в любом случае для двигателей с h≥56 мм не должно быть менее 6 - 7 мм:
 ;
;
|
t1, м |
D, м |
P |
m |
q |
|
Расчет |
0,012 |
0,180 |
2 |
3 |
4 |
Номинальный ток обмотки статора:
 ;
;
где η и cosφ соответствуют заданию на проект.
|
P2, Вт |
U1нф, В |
M |
cosφ |
Η |
I1н, А |
|
Расчет |
14000 |
220 |
3 |
0,85 |
0,78 |
31,99 |
Предварительное число эффективных проводников в пазу uп.
При определении числа эффективных проводников в пазу uп руководствуются тем, что uп должно быть целым. Поэтому полученные в расчете числа uп приходится округлять до ближайшего целого числа. Чтобы это округление не было слишком грубым, вначале определяют предварительное число эффективных проводников в пазу u´п, при условии, что параллельные ветви в обмотке отсутствуют (а=1):
 ;
;
где А - принятое ранее значение линейной нагрузки;
|
u´п |
D, м |
А, А/м |
I1н, А |
Z1 |
|
Расчет |
12,12 |
0,180 |
33000 |
31,99 |
48 |
Число эффективных проводников в пазу uп.
Полученное значение u´п не округляют до целого, а находят такое число параллельных ветвей обмотки а, при котором число эффективных проводников в пазу либо будет полностью удовлетворять отмеченным условиям, либо потребует лишь незначительного изменения. Принимаем число параллельных ветвей а=1, тогда: uп=a·u´п
Число а при этом может быть взято только из ряда возможных чисел параллельных ветвей для обмотки данного типа и заданного числа полюсов (табл.21).
Полученное число uп округляем до ближайшего целого числа.
|
u´п |
uп |
uпр |
|
Расчет |
12,12 |
12,12 |
12 |
Принятое на данном этапе расчета число параллельных ветвей а в дальнейшем, при выборе размеров и числа элементарных проводников, может быть изменено. В этом случае пропорционально меняется также и uп.
Окончательные значения витков в фазе обмотки ω1:
 ;
;
Окончательные значения линейной нагрузки А:
 ;
;
|
ω1 |
uпр |
Z1 |
A |
M |
I1н, А |
D, м |
A, А/м |
|
Расчет |
96 |
12 |
48 |
1 |
3 |
31,99 |
0,180 |
32692 |
Полученное значение нужно сопоставить с рекомендуемым (см. табл. 18,19,20).
Схему обмотки статора выбирают в зависимости от мощности машины, ориентируясь на конструкцию и предполагаемую технологию укладки обмотки в пазы. Обмоточный коэффициент kоб1 рассчитывается в зависимости от принятого укорочения шага обмотки β и числа q.
Предварительное значение обмоточного коэффициента kоб1.
Для однослойных обмоток kоб1=0,95-0,96, для двухслойных и одно-двухслойных обмоток при 2р=2 kоб1=0,90-0,91 и при большей полюсности kоб1=0,91- 0,92.
Магнитный поток Ф:
 ;
;
|
kоб1 |
Ф, Вб |
kE |
U1нф, В |
kB |
ω1 |
f1, Гц |
|
Расчет |
0,95 |
0,00105 |
0,975 |
220 |
1,111 |
96 |
50 |
Индукция в воздушном зазоре Вδ:
 ;
;
|
Вб, Тл |
р |
Ф, Вб |
D, м |
lδ, м |
|
Расчет |
0,765 |
2 |
0,00105 |
0,180 |
0,153 |
Если полученное значение Вδ выходит за пределы рекомендуемой области (см. табл. 18,19,20) более чем на 5%, следует принять другое значение числа uп и повторить расчет. Если линейная нагрузка и индукция в воздушном зазоре при принятом числе пазов и эффективных проводников в пазу находятся в рекомендуемых пределах, переходим к расчету сечения эффективного проводника и обмоточного провода.
Сечение эффективных проводников qэф. Для нахождения сечения эффективных проводников необходимо определить плотность тока J1.
С точки зрения повышения использования активных материалов плотность тока J1 должна быть выбрана как можно большей, но при этом возрастают потери в меди обмотки. Увеличение потерь сказывается, во-первых, на повышение температуры обмотки и, во-вторых, на КПД двигателя. Но влияние плотности тока на нагрев обмотки более существенно, чем на КПД. Нагрев пазовой части обмотки зависит от произведения линейной нагрузки на плотность тока (AJ1). Поэтому выбор допустимой плотности тока производится с учетом линейной нагрузки двигателя предварительно:
 ;
;
где значение AJ1 приведено в табл. 22, 23;
|
J1, А/м2 |
А, А/м |
AJ1, А2/м3 |
|
|
Расчет |
5,658·106 |
3,269·104 |
185·109 |
Сечение эффективного проводника qэф. Определяют, исходя из тока одной параллельной ветви и допустимой плотности тока в обмотке (предварительно):
 ;
;
|
qэф, м2 |
I1н, А |
а |
J1, А/м2 |
|
|
Расчет |
5,654·10-6 |
31,994 |
1 |
5,658·106 |
Для всыпных обмоток при ручной укладке диаметр обмоточного провода берут не более 1,7·10-3 м. Если расчетное сечение в машинах со всыпной обмоткой выше значений, соответствующих указанному диаметру, то эффективный проводник разделяется на несколько элементарных. Для этого по табл. 24 подбирается сечение qэл и число элементарных проводников nэл, составляющих один эффективный, таким образом, чтобы диаметр dэл элементарных проводников не выходил за указанные пределы, а их суммарная площадь сечения была близка к расчетному сечению эффективного проводника:
Принимаем: nэл=2, тогда  ;
;
Обмоточный провод ПЭТВ (по табл. 24): dэл=1,90·10-3 м; qэл=2,83·10-6 м2; qэф= qэл·nэл; qэф=5,654·10-6 м2;
Диаметр изолированного обмоточного провода: dиз=1,995·10-3 м.
|
nэл |
qэл, м2 |
qэф, м2 |
dэлт, м |
qэлт, м2 |
qэфт, м2 |
dиз, м |
|
|
Расчет |
1 |
2,827·10-6 |
5,654·10-6 |
1,90·10-3 |
2,827·10-6 |
5,654·10-6 |
1,995·10-3 |
Плотность тока в обмотке.
После окончательного выбора qэл, qэф и а следует уточнить плотность тока в обмотке, которая может несколько измениться по сравнению с предварительно выбранной при подборе сечений элементарных проводников:
 ;
;
|
J1, А/м2 |
I1н, А |
qэл, м2 |
а |
nэл |
|
|
Расчет |
5,658·106 |
31,994 |
2,827·10-6 |
1 |
2 |
На этом расчет обмотки статора заканчивается. Некоторая корректировка, которая может потребоваться в ходе последующего расчета, как правило, не вносит существенных изменений в полученные данные.
1.3. Расчёт параметров воздушного зазора.
Размеры пазов в электрических машинах должны быть выбраны таким образом, чтобы, во-первых, площадь паза соответствовала количеству и размерам размещаемых в нем проводников обмотки с учетом всей изоляции и, во-вторых, чтобы значения индукций в зубцах и ярме статора находились в определенных пределах, зависящих от типа, мощности, исполнения машины и от марки электротехнической стали сердечника. Конфигурация пазов и зубцов определяется мощностью машины и типом обмотки. Расчет размеров зубцовой зоны проводят по допустимым индукциям в ярме и зубцах статора табл. 25.
Для расчета магнитной цепи помимо длины воздушного зазора ld необходимо определить полную конструктивную длину сердечника статора и длину стали сердечника статора (l1 и lст1) и ротора (l2 и lст2) В асинхронных двигателях, длина сердечников которых не превышает 250-300 мм принимаем
l1 = l2 = ld = lст1 = lст2
Допустимая индукция Вz1 в сечении зубца статора и значение допустимой индукции в ярме статора Ва:
|
Bz1, Тл |
Ва, Тл |
|
|
Расчет |
1,8 |
1,5 |
Минимальная ширина зубца:
 ;
;
где kс - коэффициент заполнения сталью магнитопровода статора для оксидированных листов стали по табл. 26;
|
bz1, м |
Bδ, Тл |
t1, м |
lδ, м |
Bz1, Тл |
lcт1, м |
kc |
|
|
Расчет |
5,148·10-3 |
0,764 |
0,011 |
0,153 |
1,8 |
0,153 |
0,97 |
Высота ярма статора:
|
ha, м |
Ф, Вб |
Ва, Тл |
lcт1, м |
kc |
|
|
Расчет |
0,0236 |
0,01050 |
1,5 |
0,153 |
0,97 |
Высота и ширина
шлица паза. Размеры паза вначале определяем без учета размеров и числа
проводников обмотки, исходя только из допустимых значений индукций. Высоту
шлица паза hш1 в двигателях
с h≤0,132  принимают hш1=0,5·10-3
м , в двигателях с h>0,160 м принимают h=1·10-3
м. Ширину шлица паза принимают равной bш1=3,7 мм. Размер bш1 должен
обеспечивать возможность свободного пропуска проводников обмотки через
шлиц паза с учетом толщины изоляционных технологических прокладок,
устанавливаемых при укладке обмотки для предохранения изоляции
проводников от повреждений об острые кромки шлица.
принимают hш1=0,5·10-3
м , в двигателях с h>0,160 м принимают h=1·10-3
м. Ширину шлица паза принимают равной bш1=3,7 мм. Размер bш1 должен
обеспечивать возможность свободного пропуска проводников обмотки через
шлиц паза с учетом толщины изоляционных технологических прокладок,
устанавливаемых при укладке обмотки для предохранения изоляции
проводников от повреждений об острые кромки шлица.
Принимаем:
|
hш1, м |
bш1, м |
|
|
Расчет |
1·10-3 |
3,7·10-3 |
Размеры паза в штампе:
 ;
;
|
hп1, м |
Da, м |
D, м |
ha, м |
|
|
Расчет |
0,0226 |
0,272 |
0,180 |
0,0236 |
 ;
;
|
b1c, м |
D, м |
hп1, м |
Z1 |
bz1, м |
|
|
Расчет |
9,56.10-3 |
0,180 |
0,0226 |
48 |
5,148·10-3 |
 ;
;
|
b2c, м |
D, м |
hш1, м |
bш1, м |
Z1 |
bz1, м |
|
|
Расчет |
6,94·10-3 |
0,180 |
1·10-3 |
3,7·10-3 |
48 |
5,148·10-3 |
 ;
;
|
h1c, м |
hп1, м |
hш1, м |
b2с, м |
bш1, м |
|
|
Расчет |
0,02 |
0,0226 |
0,001 |
6,94·10-3 |
3,7·10-3 |
Для расчета коэффициента заполнения паза необходимо определить площадь паза в свету и учесть площадь сечения паза, занимаемую корпусной изоляцией Sиз и прокладками в пазу Sпр. Размеры паза в свету с учетом припусков на сборку и шихтовку сердечников.
 ;
;
 ;
;
 ;
;
где Dbп и Dhп – припуски по ширине и высоте паза выбираются из таблицы 27.
|
Δbп, м |
Δhп, м |
b´1, м |
b1c, м |
b´2, м |
b2c, м |
h´1c, м |
h1c, м |
|
|
Расчет |
0,2·10-3 |
0,2·10-3 |
0,00936 |
9,56.10-3 |
0,00674 |
6,94·10-3 |
0,0198 |
0,02 |
Площадь корпусной изоляции в пазу Sиз:
 ;
;
где bиз - односторонняя толщина изоляции в пазу выбирается из таблицы 28.
При однослойной обмотке площадь прокладок в пазу Sпр:
 ;
;
|
Sиз, м2 |
bиз, м |
hп1, м |
b1c, м |
Sпр, м2 |
b2c, м |
|
|
Расчет |
2,47·10-5 |
0,4·10-3 |
0,0226 |
9,56·10-3 |
0 |
6,94·10-3 |
Площадь поперечного сечения паза, остающаяся для размещения проводников:
 ;
;
|
S´п, м2 |
b´1, м |
b´2, м |
h´1с, м |
Sиз, м2 |
Sпр, м2 |
|
|
Расчет |
13,65·10-5 |
9,36·10-3 |
6,74·10-3 |
0,0198 |
2,47·10-5 |
0 |
Коэффициента заполнения паза.
 ;
;
|
kз |
dиз, м |
uпр |
nэл |
S´п, м2 |
|
|
Расчет |
0,70 |
1,995·10-3 |
12 |
2 |
13,65·10-5 |
Должен находиться в пределах: kз=0,70 – 0,75.
Если полученное значение ниже указанных пределов, то площадь паза следует уменьшить за счет увеличения ha или b1z или обоих размеров одновременно в зависимости от принятого в расчете значения допустимой индукции. Индукция в зубцах или ярме статора при этом уменьшится. Уменьшение индукции ниже пределов, указанных в табл. 25, показывает, что главные размеры двигателя завышены и активная сталь недоиспользована. В этом случае следует уменьшить длину сердечника или перейти на ближайшую меньшую высоту оси вращения.
Если полученное значение kз выше указанных пределов и его не удается уменьшить до допустимых пределов даже при размерах ha и b1z рассчитанных по наибольшим допустимым значениям Ba и Bz1, или перейдя на большее сечение элементарного провода при уменьшении nэл, то следует увеличить длину магнитопровода или просчитать другой вариант двигателя, изменив главные размеры.
1.4. Расчёт параметров обмотки ротора.
Правильный выбор воздушного зазора δ во многом определяет энергетические показатели асинхронного двигателя. В современных асинхронных двигателях зазор выбирают, исходя из минимума суммарных потерь. Так как при увеличении зазора потери в меди возрастают, а поверхностные пульсационные уменьшаются, то существует оптимальное соотношение между параметрами, при котором сумма потерь будет наименьшей.
Зависимость воздушного зазора от внутреннего диаметра статора у двигателей серии 4А приведена в табл. 29,30,31. Воздушный зазор и число пазов ротора.
Исследования, проведенные для изучения влияния соотношений числа зубцов на статоре и роторе на кривую момента, а также шумы и вибрации, позволили определить наилучшие сочетания Z1 и Z2 для короткозамкнутых двигателей с различными числами 2p. В двигателях малой мощности выполняют Z2 < Z1. Это объясняется рядом причин технологического характера, а так же тем, что с увеличением Z2 ток в стержнях ротора уменьшается и в двигателях малой мощности их сечения становятся очень малыми. В более крупных двигателях выполняют Z2 > Z1 c тем чтобы ограничить ток в стержнях ротора и увеличить равномерность распределения проводников по длине расточки.
Рекомендации по выбору Z2 при известных Z1 и 2p сведены в табл. 32:
|
δ, м |
Z2 |
|
|
Расчет |
0,4·10-3 |
34 |
Внешний диаметр D2.
D2=D-2·δ;
|
D2, м |
D, м |
δ, м |
|
|
Расчет |
0,1787 |
0,180 |
0,4·10-3 |
Конструктивная длина сердечника ротора. В машинах с h<0,25 м берут равной длине сердечника статора,
т.е. l2= lδ:
|
lδ, м |
l2, м |
|
|
Расчет |
0,153 |
0,153 |
Зубцовое деление t2:
 ;
;
|
lδ, м |
t2, м |
D2, м |
Z2 |
|
|
Расчет |
0,153 |
0,017 |
0,1787 |
34 |
Bнутренний диаметр сердечника ротора Dj. При непосредственной посадке на вал равен диаметру вала и может быть определен:
 ;
;
(значение коэффициента kв приведены в табл. 33)
|
Dj, м |
kв |
Da, м |
|
|
Расчет |
0,063 |
0,23 |
0,272 |
Коэффициент приведения токов. Рассчитываем с учетом принятых для короткозамкнутой обмотки числа фаз и витков в фазе:
 ;
;
|
vi |
M |
ω1 |
kоб1 |
Z2 |
|
|
Расчет |
16,230 |
3 |
96 |
0,95 |
34 |
Предварительное значение тока в стержне ротора:
 ;
;
где ki - коэффициент, учитывающий влияние тока намагничивания и сопротивления обмоток на отношение I1н/I2, его приближенное значение может быть взято из таблицы 34:
|
I2, А |
ki |
I1н, А |
vi |
|
|
Расчет |
462,136 |
0,89 |
31,994 |
16,230 |
Площадь поперечного сечения стержня qc:
 ;
;
где J2 - плотность тока в стержнях ротора машин закрытого обдуваемого исполнения при заливке пазов алюминием выбирается в пределах J2=(2,5 - 3,5 ´ 106) А/м2.
|
qc, м2 |
I2, А |
J2, А/м2 |
|
Расчет |
1,32·10-4 |
462,136 |
3,5·106 |
Размеры шлица и высота перемычки над
пазом. В асинхронных двигателях с короткозамкнутым ротором серии 4А с
высотой оси вращения h 0,25 м выполняют
грушевидные пазы и литую обмотку на роторе (рис. 8, а). В двигателях с
h<0,16м пазы
имеют узкую прорезь со следующими размерами: bш2=1·10-3
м и hш2=0,5·10-3
м при высоте оси вращения h<0,1 м; bш2=1,5·10-3
м и hш2=0,75·10-3
м при высоте вращения h=0,112 - 0,132 м. В двигателях с h=0,16 - 0,25 м выполняют
грушевидные закрытые пазы (рис. 8, б) с размерами шлица bш2=1·10-3
и hш2=0,75·10-3
м. Высота перемычки над пазом в двигателях с 2р≥4 выполняется
равной h’ш2=0,3·10-3
м, в двухполюсных двигателях h’ш2=1-1,5·10-3
м. Принимаем:
0,25 м выполняют
грушевидные пазы и литую обмотку на роторе (рис. 8, а). В двигателях с
h<0,16м пазы
имеют узкую прорезь со следующими размерами: bш2=1·10-3
м и hш2=0,5·10-3
м при высоте оси вращения h<0,1 м; bш2=1,5·10-3
м и hш2=0,75·10-3
м при высоте вращения h=0,112 - 0,132 м. В двигателях с h=0,16 - 0,25 м выполняют
грушевидные закрытые пазы (рис. 8, б) с размерами шлица bш2=1·10-3
и hш2=0,75·10-3
м. Высота перемычки над пазом в двигателях с 2р≥4 выполняется
равной h’ш2=0,3·10-3
м, в двухполюсных двигателях h’ш2=1-1,5·10-3
м. Принимаем:
|
bш2, м |
hш2, м |
h´ш2, м |
|
|
Расчет |
1·10-3 |
0,75·10-3 |
0,3·10-3 |
Допустимая ширина зубца. Ширина зубцов ротора определяется по допустимой индукции Bz2 (см. табл. 35):
 ;
;
|
Bz2, Тл |
Вδ, Тл |
t2, м |
lδ, м |
lст2, м |
kc |
bz2, м |
|
|
Расчет |
1,8 |
0,765 |
0,017 |
0,153 |
0,153 |
0,97 |
7,23·10-3 |
Размеры паза b1p, b2p и h1p. Рассчитывают, исходя из сечения стержня qc и из условия постоянства ширины зубцов ротора:
 ;
;
|
b1p, м |
D2, м |
hш2, м |
h´ш2, м |
Z2 |
bz2, м |
|
|
Расчет |
8,314·10-3 |
0,178 |
0,75·10-3 |
0,3·10-3 |
34 |
7,23·10-3 |
 ;
;
|
b2p, м |
b1p, м |
Z2 |
qc, м2 |
|
|
Расчет |
5,960·10-3 |
8,314·10-3 |
34 |
1,32·10-4 |
 ;
;
|
b2p, м |
b1p, м |
Z2 |
h1p, м |
|
|
Расчет |
5,960·10-3 |
8,314·10-3 |
34 |
0,0127 |
После расчета размеры паза следует округлить до десятых долей миллиметра.
|
b1p, м |
b2p, м |
h1p, м |
|
|
Расчет |
8,314·10-3 |
5,960·10-3 |
0,0127 |
Полная высота паза hп2:
 ;
;
|
hп2, м |
h´ш2, м |
hш2, м |
b1p, м |
b2p, м |
h1p, м |
|
|
Расчет |
0,021 |
0,3·10-3 |
0,75·10-3 |
8,314·10-3 |
5,960·10-3 |
0,0127 |
Уточняем площадь сечения стержня qc:
 ;
;
|
qc, м2 |
b1p, м |
b2p, м |
h1p, м |
|
|
Расчет |
1,341·10-4 |
8,314·10-3 |
5,960·10-3 |
0,0127 |
Плотность тока в стержне J2:
 ;
;
|
J2, А/м2 |
I2, А |
qc, м2 |
|
|
Расчет |
3,445·106 |
462,136 |
1,341·10-4 |
Определение тока в замыкающих кольцах Iкл короткозамкнутых роторов. Короткозамыкающие кольца литой обмотки обычно выполняются с поперечным сечением в виде неправильной трапеции, прилегающей одним из оснований к торцу сердечника ротора (см. рис. 10):
 ;
;
где:
 .
.
|
Δ |
p |
Z2 |
Iкл, А |
I2, А |
|
|
Расчет |
0,367 |
2 |
34 |
1,26·103 |
462,136 |
Плотность тока в замыкающих кольцах Jкл. выбирается в среднем на 15-20 % меньше, чем в стержнях. Это объясняется двумя причинами. Во-первых, замыкающие кольца, имея лучшие условия охлаждения по сравнению со стержнями, являются своего рода радиаторами, которые отводят тепло стержней, усиливая их охлаждение. Во-вторых, в машинах, в которых для улучшения пусковых характеристик используют эффект вытеснения тока, большое сопротивление короткозамыкающих колец снижает кратность увеличения общего сопротивления обмотки ротора при пуске.
 ;
;
|
Jкл, А/м2 |
J2, А/м2 |
|
Расчет |
2,756·106 |
3,445·106 |
Площадь поперечного сечения замыкающих колец qкл:
 ;
;
|
qкл, м2 |
Iкл, А |
Jкл, А/м2 |
|
|
Расчет |
4,56·10-4 |
1,26·103 |
2,756·106 |
Размеры замыкающих колец. Выбирают таким образом, чтобы: bкл=(1,1 - 1,25)·hп2 (рис. 10):
bкл=1,2·hп2;
|
bкл, м |
hп2, м |
|
|
Расчет |
0,0230 |
0,021 |
Расчетное сечение замыкающих колец литой обмотки, м2, принимают
qкл=акл. bкл
следовательно:
 ;
;
|
акл, м |
qкл, м2 |
bкл, м |
|
|
Расчет |
0,0198 |
4,56·10-4 |
0,0230 |
Средний диаметр замыкающих колец:
Dкл.ср=D2-bкл;
|
Dкл.ср, м |
D2, м |
bкл, м |
|
|
Расчет |
0,1556 |
0,178 |
0,0230 |
1.5. Расчёт тока намагничивания.
Индукция в зубцах статора Bz1.
 ;
;
|
Bz1, Тл |
Вδ, Тл |
t1, м |
lδ, м |
bz1, м |
lст1, м |
kc |
|
|
Расчет |
1,9 |
0,764 |
0,011 |
0,153 |
5,148·10-3 |
0,153 |
0,97 |
Индукция в зубцах ротора Bz2
 ;
;
|
Bz2, Тл |
Вδ, Тл |
t2, м |
lδ, м |
bz2, м |
lст2, м |
kc |
|
|
Расчет |
1,8 |
0,876 |
0,017 |
0,153 |
7,23·10-3 |
0,153 |
0,97 |
Индукция в ярме статора Ва:
 ;
;
|
Ва, Тл |
Ф, Вб |
ha, м |
lcт1, м |
kc |
|
|
Расчет |
1,5 |
10,5·10-3 |
0,0236 |
0,153 |
0,97 |
Расчетная высота ярма ротора h´j.
При посадке сердечника непосредственно на вал, в двигателях с 2p=2 и 2p=4, имеем:
 ;
;
|
h´j, м |
D2, м |
р |
hп2, м |
|
|
Расчет |
0,084 |
0,178 |
2 |
0,021 |
Индукция в ярме ротора Вj:
 ;
;
|
Вj, Тл |
Ф, Вб |
h´j, м |
lcт2, м |
kc |
|
|
Расчет |
0,423 |
10,5·10-3 |
0,084 |
0,153 |
0,97 |
Коэффициент воздушного зазора kδ:
 ;
;
где γ рассчитывается по следующей формуле:
 ;
;
|
γ |
bш1, м |
δ, м |
|
|
Расчет |
6 |
3,7·10-3 |
0,4·10-3 |
Магнитное напряжение воздушного зазора Fδ:
 ;
;
|
kδ |
t1, м |
γ |
δ, м |
Fδ, А |
Вδ, Тл |
|
|
Расчет |
1,257 |
0,011 |
6 |
0,4·10-3 |
611,652 |
0,765 |
Значения напряженности поля в зубцах HZ.
Находят, в соответствии с индукциями BZ для принятой марки стали. По табл. 37 , для стали 2013:
- при значении индукции статора BZ1=1,8 Тл значение напряженности поля в зубцах статора HZ1=1520 А/м;
- при значении индукции ротора BZ2=1,8 Тл значение напряженности поля в зубцах ротора HZ2=1520 А/м;
- расчетная высота зубца статора hz1= hп1;
- расчетная высота зубца ротора hz2=hп2-0,1·b2p.
|
Вz1, Тл |
Hz1, A/м |
Вz2, Тл |
Hz2, А/м |
hz1, м |
hz2, м |
hп2, м |
b2р, м |
|
|
Расчет |
1,9 |
2070 |
1,8 |
1520 |
0,023 |
0,020 |
0,021 |
5,9·10-3 |
Магнитное напряжение зубцовой зоны статора Fz1 и ротора Fz2:
 ,
,  ;
;
где hz1 - расчетная высота зубца статора;
hz2 - расчетная высота зубца ротора;
|
Fz1, A |
hz1, м |
Hz1, А/м |
Fz2, A |
hz2, м |
Hz2, А/м |
|
|
Расчет |
68,823 |
0,023 |
2070 |
61,837 |
0,020 |
1520 |
Коэффициент насыщения зубцовой зоны kZ:
 ;
;
|
kz |
Fz1, A |
Fz2, A |
Fδ, A |
|
|
Расчет |
1,213 |
68,823 |
61,837 |
611,652 |
Полученное значение kZ позволяет предварительно оценить правильность выбранных размерных соотношений и обмоточных данных проектируемой машины. Если kZ>1,5 - 1,6, имеет место чрезмерное насыщение зубцовой зоны; если kZ<1,2, то зубцовая зона мало использована или воздушный зазор взят слишком большим. В обоих случаях в расчет должны быть внесены соответствующие коррективы.
Значения напряженности поля в ярме HZ. Находят, в соответствии с индукциями BZ для принятой марки стали.
По табл. 38, для стали 2013:
- при значении индукции в ярме статора Ba=1,5 Тл, значение напряженности поля На=520 А/м,
- при значении индукции в ярме ротора Вj=0,423 Тл, значение напряженности поля Нj=52A/м.
|
Ва, Тл |
На, А/м |
Вj, Тл |
Нj, А/м |
|
|
Расчет |
1,5 |
520 |
0,423 |
52 |
Длина средней магнитной линии ярма статора La:
 ;
;
|
La, м |
Da, м |
ha, м |
P |
|
|
Расчет |
0,195 |
0,272 |
0,0236 |
2 |
Высота спинки ротора hj:
 ;
;
|
D2, м |
Dj, м |
hj, м |
hп2, м |
|
|
Расчет |
0,178 |
0,063 |
0,037 |
0,021 |
Длина средней магнитной линии потока в ярме ротора Lj.
Для всех двигателей, кроме двухполюсных с непосредственной посадкой на вал:
 ;
;
|
Dj, м |
hj, м |
Lj, м |
Р |
|
|
Расчет |
0,063 |
0,037 |
0,078 |
2 |
Для двигателей, с 2р=2, сердечник ротора которых непосредственно насажен на вал, длина средней магнитной линии определяется по формуле:
Lj=2·hj.
Магнитное напряжение ярма статора Fa и ярма ротора Fj:
Fa=La·Ha, Fj=Lj·Hj;
|
Fa, А |
La, м |
Ha, А/м |
Fj, А |
Lj, м |
Hj, А/м |
|
|
Расчет |
101,448 |
0,196 |
520 |
4,072 |
0,078 |
52 |
Суммарное магнитное напряжение магнитной цепи машины (на пару полюсов):
Fц= Fδ+ Fz1+ Fz2+ Fa+ Fj;
|
Fц, А |
Fδ, А |
Fz1, А |
Fz2, А |
Fa, А |
Fj, А |
|
|
Расчет |
847.832 |
611,652 |
68,8 |
61,83 |
101,448 |
4,072 |
Коэффициент насыщения магнитной цепи kμ:
 ;
;
|
kμ |
Fц, А |
Fδ, А |
|
|
Расчет |
1,39 |
847.832 |
611,652 |
Намагничивающий ток Iμ:
 ;
;
|
Iμ, А |
р |
Fц, А |
m |
ω1 |
kоб1 |
|
|
Расчет |
6,829 |
2 |
847.832 |
3 |
96 |
0,95 |
Относительное значение намагничивающего тока I´μ.
 ;
;
|
I´μ |
Iμ, А |
I1н, А |
|
|
Расчет |
0,215 |
6,829 |
31,994 |
Относительное значение I´μ служит определенным критерием правильности проведенного выбора и расчета размеров и обмотки двигателя. Так, если при проектировании четырехполюсного двигателя средней мощности расчет показал, что I´μ<0,2 - 0,18, то это свидетельствует о том, что размеры машины выбраны завышенными и активные материалы недоиспользованы.
Если же в аналогичном двигателе I´μ>0,3 - 0,35, то это означает, что либо его габариты взяты меньшими, чем следовало, либо неправильно выбраны размерные соотношения участков магнитопровода.
В небольших двигателях мощностью менее 2-3 кВт I´μ может достигать значения 0,5-0,6, несмотря на правильно выбранные размеры и малое насыщение магнитопровода. Это объясняется относительно большим значением магнитного напряжения воздушного зазора, характерным для двигателей малой мощности.
1.6. Расчёт параметров рабочего режима двигателя.
Параметрами асинхронной машины называют активные и индуктивные сопротивления обмоток статора r1, x1, ротора r2, x2, сопротивление взаимной индуктивности x12 и расчетное сопротивление r12, введением которого учитывают влияние потерь в стали статора на характеристики двигателя.
Для определения активного сопротивления фазы обмотки статора предварительно необходимо определить:
bкт - среднюю ширину катушки,
lвыл - длину вылета лобовой части катушки,
lп1- длину пазовой части,
lл1- длину лобовой части,
lср1 - среднюю длину витка,
L1 - общую длину проводников фазы обмотки.
Средняя ширина катушки bкт:
 ;
;
где β1 - относительное укорочение шага обмотки статора;
|
bкт, м |
D, м |
hп1, м |
Р |
β1 |
|
|
Расчет |
0,159 |
0,180 |
0,0226 |
2 |
1 |
Длина вылета лобовой части катушки lвыл:
 ;
;
где kвыл - коэффициент, значение которого берут из табл. 39 в зависимости от числа полюсов машины и наличия изоляции в лобовых частях.
В - длина вылета прямолинейной части катушек из паза от торца сердечника до начала отгиба лобовой части. Для всыпной обмотки, укладываемой в пазы до запрессовки сердечника в корпус, принимаем В=0,01 м.
|
lвыл, м |
kвыл |
bкт, м |
B, м |
|
|
Расчет |
0,074 |
0,4 |
0,159 |
0,01 |
Длина пазовой части lп1.
Равна конструктивной длине сердечников машины:
lп1= lcт1.
|
Lст1, м |
lп1, м |
|
|
Расчет |
0,153 |
0,153 |
Длина лобовой части:
lл1=kл·bкт+2·В;
где kл - коэффициент, значение которого берут из табл. 39 в зависимости от числа полюсов машины и наличия изоляции в лобовых частях.
bкт – средняя ширина катушки;
|
lл1, м |
kл |
bкт, м |
B, м |
|
|
Расчет |
0,226 |
1,3 |
0,159 |
0,01 |
Средняя длина витка lср1:
lср1=2·( lп1+ lл1).
|
lср1, м |
lл1, м |
lп1, м |
|
|
Расчет |
0,759 |
0,226 |
0,153 |
Общая длина проводников фазы обмотки L1:
L1=lср1·ω1;
|
lср1, м |
L1, м |
ω1 |
|
|
Расчет |
0,759 |
72,84 |
96 |
Для класса нагревостойкости изоляции F расчетная температура υрасч=750 С. Для меди удельное сопротивление материала обмотки при расчетной температуре:
 Ом·м;
Ом·м;
Активное сопротивление фазы обмотки статора:
|
ρ115, ом·м |
r1, Ом |
L1, м |
qэф, м2 |
а |
|
|
Расчет |
10-6/47 |
0,274 |
72,84 |
5,65·10-6 |
1 |
Для удобства сопоставления параметров отдельных машин и упрощения расчета характеристик параметры асинхронной машины выражают в относительных единицах, принимая за базисные значения номинальное фазное напряжение и номинальный фазный ток статора.
Относительное значение R1:
 ;
;
|
R1 |
r1, Ом |
I1н, А |
U1нф, В |
|
|
Расчет |
0,04 |
0,274 |
31,99 |
220 |
Относительные значения одних и тех же параметров схемы замещения различных асинхронных двигателей нормального исполнения незначительно отличаются друг от друга.
Активное сопротивление фазы обмотки ротора r2.
Находим как сумму потерь в стержне и участках замыкающих колец.
Для литой алюминиевой обмотки ротора удельное сопротивление материала при расчетной температуре:
 Ом·м;
Ом·м;
определяем сопротивление стержня rc:
 ;
;
|
rс, Ом |
Ρ75, ом·м |
lст2, м |
kr |
qc, м2 |
|
|
Расчет |
8,146·10-5 |
10-6/14 |
0,153 |
1 |
1,341·10-4 |
Сопротивление участка замыкающего кольца, заключенного между двумя соседними стержнями rкл:
|
rкл, Ом |
ρ75, Ом·м |
Dкл.ср, м |
Z2 |
qкл, м2 |
|
|
Расчет |
2,252·10-6 |
10-6/14 |
0,155 |
34 |
4,563·10-4 |
Активное сопротивление фазы обмотки ротора:
 ;
;
|
rс, Ом |
r2, Ом |
rкл, Ом |
Δ |
|
|
Расчет |
1,148·10-4 |
11,48·10-5 |
2,252·10-6 |
0,367 |
Сопротивление r2 для дальнейших расчетов должно быть приведено к числу витков первичной обмотки статора:
 ;
;
|
r´2, Ом |
r2, Ом |
m |
ω1 |
Z2 |
kоб1 |
|
|
Расчет |
0,343 |
11,48·10-5 |
3 |
96 |
34 |
0,95 |
Относительное значение R2:
 ;
;
|
|
R2, Ом |
r´2, Ом |
I1н, А |
U1нф, В |
|
Расчет |
0,050 |
0,343 |
31,994 |
220 |

Для определения индуктивного сопротивления фазы обмотки статора необходимо определить коэффициенты магнитной проводимости.
Коэффициент магнитной проводимости лобового рассеяния:
 ;
;
|
λл1 |
Q |
lл1, м |
l´δ, м |
β1 |
τ, м |
|
|
Расчет |
1,211 |
4 |
0,226 |
0,153 |
1 |
0,141 |
Коэффициент ξ.
Для определения магнитной проводимости дифференциального рассеяния при полузакрытых или полуоткрытых пазах статора с учетом скоса пазов:
 ;
;
где для βск=0,
т.к. отсутствует скос пазов и  =1,38 по табл. 38, 39 определяем k´ск;
=1,38 по табл. 38, 39 определяем k´ск;
|
ξ |
k´ск |
kβ |
kоб1 |
t2, м |
t1, м |
|
|
Расчет |
1,187 |
1,5 |
1 |
0,95 |
0,017 |
0,011 |
Коэффициент магнитной проводимости дифференциального рассеяния для обмоток статора λд1:
 ;
;
|
ξ |
δ, м |
λд1 |
kδ |
t1, м |
|
|
Расчет |
1,187 |
0,4·10-3 |
2,312 |
1,257 |
0,011 |
Коэффициент магнитной проводимости пазового рассеяния для обмоток статора λп1.
Определяется в зависимости от конфигурации пазов по формулам табл. 39:
h3=h1c; h2=0  ;
;
 ;
;
|
h3, м |
b2c, м |
h2, м |
h1, м |
bш1, м |
λп1, |
kβ |
hш1, м |
k´β |
|
|
Расчет |
0,02 |
0,00694 |
0 |
0,0162 |
3,7·10-3 |
1,57 |
1 |
0,001 |
1 |
Индуктивное сопротивление фазы обмотки статора:
 ;
;
|
х1, Ом |
f1, Гц |
ω1 |
l´δ, м |
p |
q |
λп1 |
λд1 |
λл1 |
|
|
Расчет |
0,709 |
50 |
96 |
0,153 |
2 |
4 |
1,57 |
2,312 |
1,211 |
Относительное значение х´1:
 ;
;
|
х´1 |
х1, Ом |
I1н, А |
U1нф, В |
|
|
Расчет |
0,103 |
0,709 |
31,994 |
220 |
Для определения индуктивного сопротивления фазы обмотки ротора х2 необходимо определить коэффициенты магнитной проводимости.
Коэффициент магнитной проводимости пазового рассеяния обмотки короткозамкнутого ротора λп2.
Рассчитывают по приведенным в табл. 43 формулам в зависимости от конфигурации паза ротора на рис. 17.
 ;
;
где
 .
.
|
h1., м |
hп2, м |
hш2, м |
h´ш2, м |
b2p, м |
bш2, м |
λп2 |
b1p, м |
qc |
I2, А |
|
|
Расчет |
0,0162 |
21·10-3 |
0,75·10-4 |
0,3·10-3 |
5,9·10-4 |
1·10-3 |
2,374 |
8,8·10-3 |
1,341·10-4 |
462,136 |
Для рабочего режима kд=1.
Коэффициент магнитной проводимости лобового рассеяния обмотки короткозамкнутого ротора λл2.
В роторах с литыми обмотками при замыкающих кольцах, прилегающих к торцам сердечника ротора:
 ;
;
|
λл2 |
Dкл.ср, м |
Z2 |
l´δ, м |
Δ |
акл, м |
bкл, м |
|
|
Расчет |
0,544 |
0,1556 |
34 |
0,153 |
0,367 |
0,0198 |
0,0230 |
Коэффициент магнитной проводимости дифференциального рассеяния обмотки короткозамкнутого ротора λд2.
Находим с учетом коэффициента ξ:
 ;
;
Δz – находят по кривым рис. 18.
|
ξ |
р |
Z2 |
Δz |
|
|
Расчет |
1,007 |
2 |
34 |
0,02 |
Тогда:
 ;
;
|
ξ |
λд2 |
t2, м |
δ, м |
kδ |
|
|
Расчет |
1,007 |
2,737 |
0,017 |
0,4·10-3 |
1,257 |
Суммарное значение коэффициентов магнитной проводимости обмоток и короткозамкнутого ротора Σλ2:
 ;
;
|
Σλ2 |
λп2 |
λд2 |
λл2 |
|
|
Расчет |
5,655 |
2,374 |
2,737 |
0,54 |
Индуктивное сопротивление фазы обмотки статора х2:
 ;
;
|
Σλ2 |
х2, Ом |
f1, Гц |
l´δ |
|
|
Расчет |
5,655 |
3,417·10-4 |
50 |
0,153 |
Сопротивление х2 для дальнейших расчетов должно быть приведено к числу витков первичной обмотки статора:
 ;
;
|
х´2, Ом |
х2, Ом |
Z2 |
M |
ω1 |
kоб1 |
|
|
Расчет |
1,020 |
3,417·10-4 |
34 |
3 |
96 |
0,95 |
Относительное значение Х2:
 ;
;
|
X2, Ом |
х´2, Ом |
I1н, А |
U1нф, В |
|
|
Расчет |
0,148 |
1,020 |
31,994 |
220 |
1.7. Расчёт активных потерь в двигателе.
Потери в асинхронных машинах подразделяют на потери в стали
(основные и добавочные), электрические потери, вентиляционные, механические и добавочные потери при нагрузке.
Основные потери в стали асинхронных двигателей рассчитывают только в сердечнике статора, так как частота перемагничевания ротора, в режимах, близких к номинальному, очень мала и потери в стали ротора даже при больших индукциях незначительны.
Масса стали ярма статора mа:
 ;
;
где γс - удельная масса стали; в расчетах принимают γс=7,8·103 кг/м3;
|
ma, кг |
Da, м |
ha, м |
lст1, м |
kc |
γc, кг/м3 |
|
|
Расчет |
21,316 |
0,272 |
0,0236 |
0,153 |
0,97 |
7,8·103 |
Масса стали зубцов статора mz1:
 ;
;
|
mz1, кг |
hz1, м |
bz1, м |
Z1 |
lст1, м |
kc |
γc, кг/м3 |
|
|
Расчет |
6,47 |
0,023 |
5,148·10-3 |
48 |
0,153 |
0,97 |
7,8·103 |
Потери в стали основные Рст. осн:
 ;
;
где: р1.0.50 - удельные потери по табл. 44;
β - показатель степени по табл. 44;
kда и kдz - коэффициенты , учитывающие влияние на потери в стали неравномерности распределения потока по сечениям участков магнитопровода и технологических факторов;
|
Рст.осн,Вт |
р1.0.50 |
β |
f1, Гц |
kда |
kдz |
Ва, Тл |
Вz1, Тл |
ma, кг |
mz1, кг |
|
|
Расчет |
244,30 |
2,5 |
1,5 |
50 |
1,6 |
1,8 |
1,5 |
1,8 |
21,316 |
6,47 |
Добавочные потери в стали, возникающие при холостом ходе, подразделяются на поверхностные (потери в поверхностном слое коронок зубцов статора и ротора от пульсации индукции в воздушном зазоре) и пульсационные потери в стали зубцов (от пульсации индукции в зубцах).
Поверхностные потери в роторе:
Для определения поверхностных потерь вначале находим амплитуду пульсации индукции в воздушном зазоре над коронками зубцов ротора В02:
В02=β02·kδ·Bδ;
где для зубцов ротора β02 зависит от отношения bш1/δ=7,5 и его значение находим из рис. 19:
|
В02, Тл |
β02 |
kδ |
Вδ, Тл |
|
|
Расчет |
0,337 |
0,35 |
1,257 |
0,764 |
Удельные поверхностные потери рпов2. Рассчитывают по В02 и частоте пульсаций индукции над зубцами:
 ;
;
где k02 - коэффициент, учитывающий влияние обработки поверхности головки зубцов ротора на удельные потери;
|
рпов2, Вт/м2 |
k02 |
Z1 |
n1, об/мин |
В02, Тл |
t1, м |
|
|
Расчет |
226,638 |
1,5 |
48 |
3000 |
0,337 |
0,011 |
Полные поверхностные потери в роторе Рпов2:
 ;
;
|
Рпов2, Вт |
рпов2, Вт/м2 |
Z2 |
bш2 |
lcт2, м |
t2, м |
|
|
Расчет |
18,287 |
226,638 |
34 |
1·10-3 |
0,163 |
0,017 |
Пульсационные потери в зубцах ротора:
Для определения пульсационных потерь вначале находим амплитуду пульсации индукции в среднем сечении зубцов ротора Впул2:
 ;
;
|
Впул2, Тл |
γ |
δ, м |
Вz2, Тл |
t2, м |
|
|
Расчет |
0,131 |
6 |
0,4·10-3 |
1,8 |
0,017 |
Массу стали зубцов ротора mz2:
mz2=Z2·hz2·bz2·lcт2·kc·γc;
|
mz2, кг |
hz2, м |
bz2, м |
Z2 |
lст2, м |
kc |
γc, кг/м3 |
|
|
Расчет |
5,793 |
0,020 |
7,23·10-3 |
34 |
0,153 |
0,97 |
7,8·103 |
Пульсационные потери в зубцах ротора Рпул2:
 ;
;
|
Рпул2, Вт |
Z1 |
n1, об/мин |
Впул2, Тл |
mz2, кг |
|
|
Расчет |
56.596 |
48 |
3000 |
0.131 |
5.793 |
Поверхностные и пульсационные потери в статорах двигателей с короткозамкнутыми роторами со стержневой обмоткой обычно очень малы, так как в пазах таких роторов мало bш2 и пульсации индукции в воздушном зазоре над головками зубцов статора незначительны. Поэтому расчет этих потерь в статорах таких двигателей не производят.
Сумма добавочных потерь в стали Рст. доб:
 ;
;
|
Рст.доб, Вт |
Рпов2, Вт |
Рпул2, Вт |
|
|
Расчет |
74.883 |
18.287 |
56.596 |
Полные потери в стали Рст:
Рст= Рст, осн+ Рст. доб;
|
Рст.доб, Вт |
Рст.осн, Вт |
Рст, Вт |
|
|
Расчет |
74.883 |
244.30 |
319.185 |
Механические потери Рмех. (для двигателей 2р=4 коэффициент kТ=1 и kТ=1,3·(1-Da) при 2р>2. В нашем случае коэффициент kТ=0,95):
 ;
;
|
Рмех, Вт |
Kт |
n1, об/мин |
Da, м |
|
|
Расчет |
116.556 |
0.95 |
3000 |
0,272 |
Добавочные потери при номинальной нагрузке. Добавочные потери при номинальном режиме асинхронных двигателей возникают за счет действия потоков рассеяния, пульсаций индукции в воздушном зазоре, ступенчатости кривых распределения МДС обмоток статора и ротора и ряда других причин. В короткозамкнутых роторах, кроме того, возникают потери от поперечных токов, т.е. токов между стержнями, замыкающихся через листы сердечника ротора. Эти токи особенно заметны при скошенных пазах ротора. В таких двигателях, как показывает опыт эксплуатации, добавочные потери при нагрузке могут достигать 1-2% (а в некоторых случаях даже больше) от подводимой мощности. ГОСТ устанавливает средние расчетные добавочные потери при номинальной нагрузке, равны 0,5% номинальной мощности.
 ;
;
|
Рдоб.н, Вт |
Р2, Вт |
η |
|
|
Расчет |
89.74 |
14·103 |
0,78 |
Холостой ход двигателя: При определении активной составляющей тока холостого хода принимают, что потери на трение и вентиляцию и потери в стали при холостом ходе двигателя такие же как и при номинальном режиме. Электрические потери в статоре при холостом ходе Рэ1хх приближенно принимаются равными:
 ;
;
|
Рэ1хх, Вт |
Iμ, А |
r1, Ом |
|
|
Расчет |
38.347 |
6.829 |
0.274 |
Активная составляющая тока холостого хода Iхха:
 ;
;
|
Рст, Вт |
Рмех, Вт |
Рэ1хх, Вт |
m |
U1нф, В |
Iхх.а, А |
|
|
Расчет |
319.188 |
116.556 |
38.347 |
3 |
220 |
0.718 |
Реактивная составляющая тока холостого хода, равна намагничивающему току Iμ . Холостой ход двигателя Iхх:
 ;
;
|
Iхх.а, А |
Iμ, А |
Iхх, А |
|
|
Расчет |
0.718 |
6.829 |
6.866 |
Коэффициент мощности при холостом ходе cosφ:
 ;
;
|
Iхх.а, А |
сosφхх |
Iхх, А |
|
|
Расчет |
0.718 |
0.105 |
6.866 |
1.8. Расчет рабочих характеристикдвигателя.
Методы расчета характеристик базируются на системе уравнений токов и напряжений асинхронной машины, которой соответствует Г-образная схема замещения (рис. 23).
Активные и индуктивные сопротивления схемы замещения являются параметрами машины. Сопротивление r12 и х12 с достаточной для обычных расчетов точностью определяют по следующим формулам:
 ,
,
 ;
;
|
r12, Ом |
Pст.осн, Вт |
U1нф, В |
х1, Ом |
m |
Iμ, А |
|
|
Расчет |
1.746 |
244.301 |
220 |
0.709 |
3 |
6.829 |
Коэффициент с1 представляет собой взятое с обратным знаком отношение вектора напряжения фазы U1нф к вектору ЭДС. Для расчета с1 воспользуемся приближенной формулой, т.к. в асинхронных двигателях мощностью более 2-3 кВт, как правило, [γ]≤1, поэтому реактивной составляющей коэффициента c1 можно пренебречь, тогда приближенно:
 ,
,
|
c1 |
х12, Ом |
х1, Ом |
|
|
Расчет |
1.023 |
31.508 |
0.709 |
где
 ;
;
|
х12, Ом |
х1, Ом |
r12, Ом |
γ, рад |
r1, Ом |
|
|
Расчет |
31.508 |
0.709 |
1.746 |
0.020 |
0.274 |
Активную составляющую тока синхронного холостого хода определяют из выражения:
 ;
;
Реактивную составляющую тока синхронного холостого хода принимаем равную току намагничивания
Iор= Im.
|
Ioa, А |
Рст.осн, Вт |
Iμ, А |
r1, Ом |
U1нф, В |
|
|
Расчет |
0.428 |
244.301 |
6.829 |
0.274 |
220 |
Так как [γ]≤1 и мы используем приближенный метод, то в этом случае необходимо ввести дополнительные расчетные величины:
а´=с12;
а=с1r1;
b´=0;
b=c1(x1+c1x2’)
|
а´ |
b´ |
b, Ом |
r1, Ом |
х1 |
х´2 |
|
|
Расчет |
1.046 |
0 |
0.881 |
0.274 |
0.709 |
0.148 |
В данном случае постоянные потери (не меняются при изменении скольжения):
ΣP=Pст+Рмех=435,740 Вт .
|
Рст, Вт |
Рмех, Вт |
ΣР, Вт |
|
|
Расчет |
319.185 |
116.556 |
435.740 |
Принимаем sн=R2=0,049 и рассчитаем рабочие характеристики, задаваясь скольжением s.Результаты расчета сведены в таблицу
Таблица 1
|
№ п/п |
Расчетная формула |
Еди- ница |
Скольжение |
||||||
|
0,01 |
0,015 |
0,02 |
0,025 |
0,030 |
0,035 |
0,040 |
|||
|
1 |
|
Ом |
35,863 |
23,909 |
17,931 |
14,345 |
11,954 |
10,247 |
8,966 |
|
2 |
|
Ом |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
|
3 |
|
Ом |
36,142 |
24,188 |
18,211 |
14,624 |
12,233 |
10,526 |
9,245 |
|
4 |
|
Ом |
0,881 |
0,881 |
0,881 |
0,881 |
0,881 |
0,881 |
0,881 |
|
5 |
|
Ом |
36,153 |
24,204 |
18,232 |
14,651 |
12,265 |
10,562 |
9,287 |
|
6 |
|
А |
6,085 |
9,090 |
12,067 |
15,016 |
17,937 |
20,829 |
23,690 |
|
7 |
|
- |
0,999703 |
0,999338 |
0,998833 |
0,998192 |
0,997420 |
0,996519 |
0,995495 |
|
8 |
|
- |
0,024 |
0,036 |
0,048 |
0,060 |
0,072 |
0,083 |
0,095 |
|
9 |
|
А |
6,511 |
9,511 |
12,481 |
15,417 |
18,319 |
21,184 |
24,011 |
|
10 |
|
А |
6,977 |
7,159 |
7,411 |
7,731 |
8,116 |
8,565 |
9,075 |
|
11 |
|
А |
9,543 |
11,905 |
14,515 |
17,247 |
20,036 |
22,850 |
25,669 |
|
12 |
|
А |
6,225 |
9,298 |
12,344 |
15,361 |
18,349 |
21,306 |
24,233 |
|
13 |
|
кВт |
4,2976 |
6,276 |
8,2373 |
10,1753 |
12,0905 |
13,9815 |
15,8474 |
|
14 |
|
кВт |
0,0745 |
0,1160 |
0,1724 |
0,2434 |
0,3285 |
0,4273 |
0,5392 |
|
15 |
|
кВт |
0,0398 |
0,0889 |
0,01567 |
0,2426 |
0,3462 |
0,4668 |
0,6038 |
|
16 |
|
кВт |
0,0080 |
0,0124 |
0,0185 |
0,0261 |
0,0352 |
0,0458 |
0,0578 |
|
17 |
|
кВт |
0,5581 |
0,6530 |
0,7833 |
0,9478 |
1,1456 |
1,3755 |
1,6365 |
|
18 |
|
кВт |
3,7395 |
5,6245 |
7,4540 |
9,2275 |
10,9449 |
12,6060 |
14,2109 |
|
19 |
|
- |
0,8701 |
0,8960 |
0,9049 |
0,9068 |
0,9052 |
0,9016 |
0,8967 |
|
20 |
|
- |
0,6823 |
0,7990 |
0,8598 |
0,8939 |
0,9143 |
0,9271 |
0,9354 |















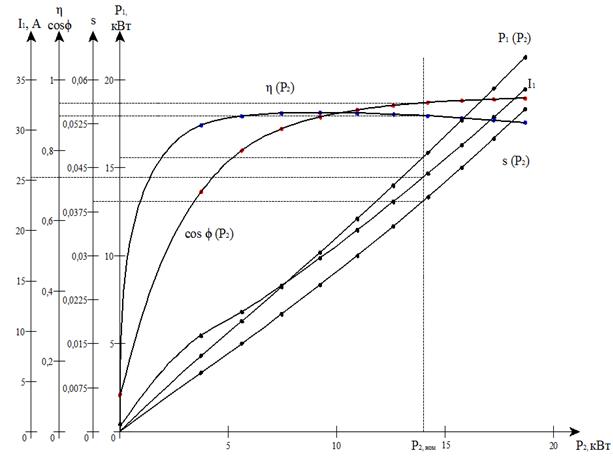
Рис. 1 – Рабочие характеристики спроектированного асинхронного двигателя
I1, Cosф=f(P2), КПД=f(P2), P1, S(скольжение).
1.9. Расчет пусковых характеристик.
Данные необходимые для расчета пусковых характеристик.
|
Р2, Вт |
U1нф, В |
2р |
I1н, А |
х12, Ом |
х´2, Ом |
х1, Ом |
r1, Ом |
r´2, Ом |
sн |
|
|
Расчет |
14000 |
220 |
4 |
31,994 |
31.508 |
1.020 |
0.709 |
0.274 |
0.343 |
0,049 |
Рассчитываем пусковые характеристики с учетом вытеснения тока и насыщения при рабочей температуре q=750С, для значений скольжения S=1;0,8;0,5;0,2;0,15;0,1.Подробный расчет приведен для скольжения S=1.Остальные данные расчета сведены в таблицу 2.9.1..
Высота стержня в пазу hc:
 ;
;
|
hc, м |
hп2, м |
h´ш2, м |
hш2, м |
|
Расчет |
0.020 |
0.021 |
0.0003 |
0,00075 |
По полной высоте стержня и удельному сопротивлению материала стержня (для литой алюминиевой обмотки ротора ρ115=10-6/20,5 Ом·м) определяют:
функцию ξ:
 ;
;
|
ξ |
hc, м |
S |
|
|
Расчет |
1.187 |
0.020 |
1 |
В соответствии с функцией ξ находим
по кривым рис.25 и рис.26 функции и
и 
|
ξ |
|
|
|
|
Расчет |
1.187 |
0.233 |
0.91 |
Глубина проникновения тока в стержень обмотки.
 ;
;
|
hr, м |
|
hc, м |
|
|
Расчет |
0.016 |
0.233 |
0.020 |
В расчете условно принимаем, что при действии эффекта вытеснения, ток ротора распределен равномерно, но не по всему сечению стержня, а лишь по его верхней части, ограниченной высотой hr, имеющее сечение qr, которое находим по следующей формуле:
 ,
,
где br рассчитывается по следующей формуле:
 ;
;
|
br, м |
b1р, м |
b2p, м |
hr, м |
h1р, м |
|
Расчет |
0.00618 |
0,0083 |
0,006 |
0.016 |
0.013 |
тогда сечение стержня qr:
|
qr·10-3, м2 |
b1р, м |
br, м |
hr, м |
|
Расчет |
11.4·10-5 |
0,0083 |
0.00618 |
0.013 |
Коэффициент kr через отношение площадей всего сечения стержня и сечения, ограниченного высотой hr:
 ,
,
где qc - площадь поперечного сечения стержня (см. п. 2.4.8.).
|
kr |
qr, м2 |
qc, м2 |
|
|
Расчет |
1.178 |
11.4·10-5 |
13.4·10-5 |
Коэффициент общего увеличения сопротивления фазы ротора. Для расчета характеристик необходимо учитывать изменение сопротивления всей обмотки ротора r2, поэтому удобно ввести коэффициент общего увеличения сопротивления фазы ротора под влиянием эффекта вытеснения тока:
 ;
;
|
KR |
r2, Ом |
kr |
rc, Ом |
|
Расчет |
1.126 |
11.5·10-5 |
1.178 |
8.15·10-5 |
Приведенное активное сопротивление фазы обмотки ротора с учетом вытеснения тока:
 ;
;
|
|
|
KR |
|
|
Расчет |
0.386 |
0.343 |
1.126 |


Индуктивное сопротивление обмотки ротора. Коэффициент магнитной проводимости пазового рассеяния с учетом действия эффекта вытеснении тока λп2ξ:
 ;
;
|
λп2ξ |
h1, м |
b1р, м |
qc, м2 |
bш2, м |
hш2, м |
kД |
|
Расчет |
2.359 |
0.0016 |
8.3·10-3 |
13.4·10-5 |
1·10-3 |
0,75·10-3 |
0,99 |
где kд - коэффициент демпфирования, показывает, как уменьшилась проводимость участка паза, занятого проводником с током, при действии эффекта вытеснении тока с проводимостью того же участка, но при равномерной плотности тока в стержне.
Изменение индуктивного сопротивления фазы обмотки ротора от действия эффекта вытеснения тока Kx:
 ;
;
|
λп2ξ |
λл2 |
λд2 |
λп2 |
Кх |
|
Расчет |
2.359 |
0.54 |
2.737 |
2.374 |
0.997 |
где l п2 - коэффициент магнитной проводимости пазового рассеяния обмотки короткозамкнутого ротора
lл2 - коэффициент магнитной проводимости лобового рассеяния обмотки короткозамкнутого ротора.
l д2 - коэффициент магнитной проводимости дифференциального рассеяния обмотки короткозамкнутого ротора.
Приведенное индуктивное сопротивление фазы обмотки ротора от действия эффекта вытеснения тока:
 ;
;
|
х´2ξ |
Kх |
х´2 |
|
Расчет |
1.017 |
0.997 |
1.020 |
где x`2x - приведенное индуктивное сопротивление.
Ток ротора приближенно без учета влияния
насыщения  :
:
 ;
;
|
I´2, A |
U1нф, В |
r1, Oм |
r´2ξ, Oм |
sн |
x 1, Oм |
x´ 2ξ, Oм |
|
Расчет |
119.013 |
220 |
0.274 |
0,386 |
0,049 |
0.709 |
1.017 |
где r1 - активное сопротивление обмотки статора, x1=0.709Ом - индуктивное сопротивление фазы обмотки статора.
Учет влияния насыщения на параметры. При расчете влиянии параметров предыдущих режимов можно было не учитывать влияния насыщения, так как токи в этих режимах относительно малы и потоки рассеяния не создают заметного падения напряжения в стали зубцов. При увеличении скольжении свыше критического и в пусковых режимах токи возрастают, и потоки рассеяния увеличиваются. Поэтому в расчетах задаются предполагаемой кратностью увеличение тока, обусловленной уменьшением индуктивного сопротивления из-за насыщения зубцовой зоны. Ориентировочно для расчета пусковых режимов, принимают Кнас=1,1-1,4.
Средняя МДС обмотки, отнесенная к одному пазу обмотки статора:
 ;
;
|
|
uпр |
а |
|
kоб1 |
Z1 |
Z2 |
Fп.ср, А |
|
Расчет |
119.013 |
12 |
1 |
1 |
0.95 |
48 |
34 |
2.822·103 |

где uп - число эффективных проводников в пазу (п.2.2.6.),
а - число параллельных ветвей.
Коэффициент для определения фиктивной индукции потока рассеяния в воздушном зазоре:
 ;
;
|
СN |
δ, м |
t1, м |
t2, м |
|
|
Расчет |
0.937 |
0,0004 |
0,011 |
0,017 |
где d - воздушный зазор;
t1 и t2 - зубцовые деления статора и ротора.
Фиктивная индукция потока рассеяния в воздушном зазоре:
 ;
;
|
СN |
δ, м |
Fп.ср, А |
Вфδ, Тл |
|
|
Расчет |
0.937 |
0,0004 |
2.822·103 |
4.704 |
Коэффициент магнитной проводимости пазового рассеяния обмотки статора с учетом насыщения.
По полученному значению BFd и по таблице 46 находим отношение потока рассеяния при насыщении к потоку рассеяния не насыщенной машины, характеризуемой коэффициентом хδ:
 ;
;
|
с1 |
t1, м |
bш1, м |
хδ |
|
|
Расчет |
3.944·10-3 |
0,011 |
0,0037 |
0.51 |
Вызванное насыщение от полей рассеяния уменьшение коэффициента проводимости рассеяния полузакрытого паза статора:
 ;
;
где hш1 - размер паза в штампе;
h1 - размер паза в свету с учетом припуска на сборку.
|
с1 |
h1, м |
bш1, м |
|
hш1, м |
|
|
Пример |
3.944·10-3 |
0,0016 |
0,0037 |
0.106 |
0,001 |

Коэффициент магнитной проводимости пазового рассеяния обмотки статора с учетом насыщения:
 ;
;
|
λп1нас |
λп1 |
Δλп1нас |
|
Расчет |
1.464 |
1.570 |
0.106 |
где lп1 - проводимость, рассчитанная без учета насыщения (п.2.6.17.).
Коэффициент магнитной проводимости дифференциального рассеяния обмотки статора с учетом влияния насыщения:
 ;
;
|
λд1нас |
λд1 |
хδ |
|
Расчет |
1.179 |
2.311 |
0.51 |
где lд1 - коэффициент магнитной проводимости дифференциального рассеяния обмотки статора без учета влияния насыщения.
Индуктивное сопротивление обмотки статора с учетом влияния насыщения:
|
х1нас |
х1 |
λп1нас |
λд1нас |
λп1 |
λд1 |
λл1 |
|
|
Расчет |
0.536 |
0.709 |
1.464 |
1.179 |
1.570 |
2.311 |
1.210 |
где lл1 - коэффициент магнитной проводимости лобового рассеяния обмотки статора без учета влияния насыщения,
x1 - индуктивное сопротивление фазы обмотки статора.
Коэффициент магнитной проводимости пазового рассеяния обмотки ротора с учетом насыщения:
 ;
;
|
с2 |
t2, м |
bш2, м |
Хδ |
|
|
Расчет |
7.602·10-3 |
0,017 |
0,001 |
0.51 |
Уменьшение коэффициента проводимости рассеяния паза ротора:
|
с2 |
hш2, м |
bш2, м |
|
|
|
Расчет |
7.602·10-3 |
0,00075 |
0,001 |
0.662 |

Коэффициент магнитной проводимости пазового рассеяния обмотки ротора с учетом насыщения:
 ;
;
|
λп2ξнас |
λп2ξ |
Δλп2ξнас |
|
Расчет |
1.697 |
2.359 |
0.662 |
Коэффициент магнитной проводимости дифференциального рассеяния обмотки ротора с учетом влияния насыщения:
 ;
;
|
λд2нас |
λд2 |
хδ |
|
Расчет |
1.395 |
2.737 |
0.51 |
Приведенное индуктивное сопротивление фазы обмотки ротора с учетом насыщения и вытеснения тока:
 ;
;
|
х"2нас |
х"2 |
λп2ξнас |
λд2нас |
λп2 |
λд2 |
λл2 |
|
|
Расчет |
0.656 |
1.020 |
1.697 |
1.395 |
2,374 |
2.737 |
0.54 |
Сопротивление взаимной индукции обмоток статора и ротора в пусковом режиме:
 ;
;
|
х12п, Ом |
х12, Ом |
Fц, А |
Fδ, А |
|
|
Расчет |
43.674 |
31.507 |
847.831 |
611.651 |
где x12 - сопротивление взаимной индукции обмоток статора и ротора (п.2.8.1.); Fц - суммарное магнитное напряжение магнитной цепи машины (на пару полюсов) (п.2.5.16.);
Fd - магнитное напряжение воздушного зазора (п.2.5.7.).
Коэффициент с1пнас.
 ;
;
|
с1пнас |
х1нас |
х12п |
|
|
Расчет |
1.012 |
0.536 |
43.674 |
Активная составляющая сопротивления правой ветви Г-образной схемы замещения (см. рис.23 ).
 ;
;
|
с1пнас |
r1, Oм |
r"2ξ |
s |
aп |
|
|
Расчет |
1.012 |
0.274 |
0.386 |
1 |
0.665 |
Реактивная составляющая сопротивления правой ветви Г - образной схемы замещения.
 ;
;
|
с1пнас |
x1нас, Oм |
x"2ξнас |
bп |
|
|
Расчет |
1.012 |
0.536 |
0.656 |
1.2 |
Ток в обмотке ротора.
 ;
;
|
I"2п |
U1нф, Oм |
ап |
bп |
|
|
Расчет |
160.283 |
220 |
0.665 |
1.200 |
Ток в обмотке ротора с учетом коэффициента с1пнас.
 ;
;
|
I1п, А |
I´2п, A |
x12п |
с1пнас |
ап |
bп |
|
|
Расчет |
162.709 |
160.283 |
43.674 |
1.012 |
0.665 |
1.200 |
Ток в обмотке ротора в относительных единицах.
 ;
;
|
I1п* |
I1п, А |
I1н, А |
|
|
Расчет |
5.085 |
162.709 |
31.994 |
где I1н – номинальный ток обмотки статора.
Относительное значение момента Мп*.
 ;
;
|
Мп* |
I´2п, А |
I´2н, А |
KR |
sн |
S |
|
|
Расчет |
1.629 |
160.283 |
29.754 |
1.126 |
0,049 |
1 |
Для
определения тока  повторим расчет пунктов
1.9.2.-1.9.32. для s=sн=0,049.
повторим расчет пунктов
1.9.2.-1.9.32. для s=sн=0,049.
 ;
;
|
ξ |
hc, м |
sн |
|
Расчет |
0.40 |
0.020 |
0,049 |
 ;
;
где  находим по рис.25
находим по рис.25
 находим по рис.26
находим по рис.26
|
hr, м |
hc, м |
Φ |
φ´ |
|
Расчет |
0.019 |
0.021 |
0.035 |
0,99 |
 ;
;
|
qr, м |
b1p, м |
br, м |
hr, м |
|
Расчет |
13.2·10-5 |
8.3·10-3 |
5.636·10-3 |
0.019 |
 ;
;
|
br, м |
b1p, м |
b2p, м |
h1p, м |
hr, м |
|
Расчет |
5.636·10-3 |
8.3·10-3 |
6·10-3 |
0.013 |
0,019 |
 ;
;
|
qr, м |
qс, м |
kr |
|
Расчет |
13.2·10-5 |
13.4·10-5 |
1,016 |
 ;
;
|
KR |
rc, Ом |
r2, Ом |
kr |
|
Расчет |
1.011 |
8.15·10-5 |
11.5·10-5 |
1.016 |

|
r´2ξ |
KR |
r´2 |
|
Расчет |
0.346 |
1.011 |
0.342 |
 ;
;
|
λп2ξ |
h1, м |
b1р, м |
qc, м |
bш2, м |
hш2, м |
kД |
|
|
Расчет |
2,359 |
0,013 |
8.3·10-3 |
13.4·10-3 |
1·10-3 |
0,75·10-3 |
0,99 |
;
|
λп2ξ |
λл2 |
λд2 |
λп2 |
Кх |
|
|
Расчет |
2.359 |
0.54 |
2.737 |
2.374 |
0.997 |
 ;
;
|
х´2ξ |
Kх |
х´2 |
|
|
Расчет |
1,017 |
0.997 |
1.020 |
 ;
;
|
I´2, A |
U1нф, В |
r1, Oм |
r´2ξ, Oм |
sн |
x 1нас, Oм |
x´ 2ξнас, Oм |
|
Расчет |
119.39 |
220 |
0.274 |
0.386 |
0,049 |
0.536 |
0.656 |
Критическое скольжение
 ;
;
|
sкр |
r´2 |
х1нас |
с1нас |
х´2ξнас |
|
|
Расчет |
0,288 |
0,342 |
0,536 |
1,012 |
0,656 |
Построение рабочих и механической характеристик производится по расчетным данным пп. 1.1.1. – 1.9.32. с использованием программы описанной в главе 2.
|
№ Пп |
Расчетная формула |
Еди-ница |
Скольжение |
||||||||||
|
0,0339 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1 |
|||
|
1 |
Ξ |
- |
0,2824 |
0,4 |
0,5658 |
0,693 |
0,8002 |
0,8947 |
0,98 |
1,0586 |
1,1317 |
1,20034 |
1,2653 |
|
2 |
Φ |
- |
0,02510 |
0,03557 |
0,0503 |
0,0616 |
0,07113 |
0,07953 |
0,12 |
0,14 |
0,18 |
0,2 |
0,233 |
|
3 |
kr=qc/qr |
- |
1,0079 |
1,0164 |
1,0283 |
1,0374 |
1,0451 |
1,052 |
1,085 |
1,10144 |
1,1345 |
1,1511 |
1,1786 |
|
4 |
|
- |
1,0056 |
1,0116 |
1,02 |
1,02655 |
1,03203 |
1,03687 |
1,06032 |
1,07198 |
1,09544 |
1,1072 |
1,1267 |
|
5 |
|
Ом |
0,3446 |
0,3467 |
0,3496 |
0,3518 |
0,3537 |
0,35536 |
0,3634 |
0,3674 |
0,37543 |
0,37947 |
0,38617 |
|
6 |
kд |
- |
0,99 |
0,99 |
0,99 |
0,99 |
0,99 |
0,99 |
0,99 |
0,99 |
0,99 |
0,99 |
0,99 |
|
7 |
|
- |
0,997 |
0,997 |
0,997 |
0,997 |
0,997 |
0,997 |
0,997 |
0,997 |
0,997 |
0,997 |
0,997 |
|
8 |
|
- |
1,0176 |
1,0176 |
1,0176 |
1,0176 |
1,0176 |
1,0176 |
1,0176 |
1,0176 |
1,0176 |
1,0176 |
1,0176 |
|
9 |
|
- |
0,9031 |
0,79243 |
0,76935 |
0,71429 |
0,70892 |
0,70463 |
0,70357 |
0,7009 |
0,69823 |
0,69557 |
0,6561 |
|
10 |
|
- |
0,58121 |
0,6226 |
0,60864 |
0,57409 |
0,57066 |
0,56792 |
0,56723 |
0,56552 |
0,56381 |
0,5621 |
0,53655 |
|
11 |
|
- |
1,0133 |
1,0142 |
1,01394 |
1,01314 |
1,01307 |
1,013 |
1,01299 |
1,01295 |
1,01291 |
1,01287 |
1,01285 |
|
12 |
|
Ом |
7,2813 |
3,79068 |
2,04649 |
1,46228 |
1,16993 |
0,99408 |
0,88765 |
0,80576 |
0,74947 |
0,70118 |
0,66503 |
|
13 |
|
Ом |
1,49638 |
1,4263 |
1,38871 |
1,29777 |
1,28884 |
1,28172 |
1,27994 |
1,27549 |
1,27106 |
1,26662 |
1,2006 |
|
14 |
|
А |
29,5955 |
54,3191 |
88,9542 |
112,525 |
126,39 |
135,632 |
141,242 |
145,822 |
149,096 |
151,959 |
160,283 |
|
15 |
|
А |
30,5974 |
55,4997 |
90,6145 |
114,426 |
128,485 |
137,854 |
143,545 |
148,186 |
151,5 |
154,398 |
162,709 |
|
16 |
|
- |
0,95634 |
1,7346 |
2,8322 |
3,5764 |
4,016 |
4,3087 |
4,4866 |
4,6316 |
4,7352 |
4,8258 |
5,0855 |
|
17 |
|
- |
0,99493 |
1,6804 |
2,2720 |
2,4391 |
2,3203 |
2,1476 |
1,9847 |
1,8332 |
1,7136 |
1,5993 |
1,6296 |







Таблица 2
Рис. – Пусковые характеристики спроектированного асинхронного двигателя
Заключение
4А160S4
В ходе выполнение курсового проектирования был разработан асинхронный двигатель с короткозамкнутым ротором. Для реализации процесса проектирования потребовалось решения следующих задач: произвести выбор главных размеров двигателя, определить его линейную нагрузку; разработать конструкцию магнитопровода статора и ротора асинхронной машины, выбрать конфигурацию пазов для обмоток статора и ротора и определить параметры пазов; спроектировать конструкцию обмоток статора и ротора и рассчитать их параметры. Оценка качества разработанной конструкции двигателя проводилась с помощью рабочих и пусковых характеристик асинхронного двигателя для построения которых необходимо было определить активные потери, возникающие в двигателе и параметры его схемы замещения.
Разработанный в курсовом проекте асинхронный двигатель имеет следующие паспортные данные:
1. Номинальное (фазное) напряжение питания U1нф, В – 220;
2. Частота напряжения питания сети f1, Гц – 50;
3. Число фаз напряжения питания m1 – 3
4. Номинальная мощность Р2, кВт –17,2;
5. Синхронная скорость вращения n1, об/мин – 1500;
6. Номинальное значение КПД η (не менее), отн. ед. – 0,88;
7. Номинальное значение коэффициента мощности cos(φ) (не менее), отн. ед. – 0,94;
8. Кратность пускового момента, lПУСК=МПУСК/ МНОМ, – 1,64;
9. Кратность максимального момента, lMAX=М MAX / МНОМ, – 2,28;
10. Кратность максимального тока, lI MAX=I MAX / IНОМ, – 5,32;
11. Конструктивное исполнение – IM1001;
12. Исполнение по способу защиты от воздействия окружающей среды – IP44;
13. Категория климатического исполнения – У3.
Разработанный в ходе курсового проектирования асинхронный двигатель 4А160S4УЗ имеет паспортные данные, значения которых удовлетворяют заданию на курсовое проектирование и может быть введен в эксплуатацию.
СПИСОК ЛИТЕРАТУРЫ
1. Алиев И.И. Справочник по электротехнике и электрооборудованию: учебное пособие для вузов. / И.И. Алиев. – М: Изд-во "Высшая школа". – 2005. – 255 с.
2. Алиев И. И. Электрические машины: учебно-справочное пособие / И. И. Алиев. – М: РадиоСофт. – 2011.
3. Акимова Н.А. Монтаж, техническая эксплуатация и ремонт электрического и электромеханического оборудования: уч.пос.3-е изд.,стер. / Н.А. Акимова. – М: Академия -2005. – 296 с.
4. Андрианов В.Н. Электрические машины и аппараты / В.Н. Андрианов. – М: Книга по требованию. – 2012.
5. Белов М.П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: учебник.2-е изд. стер. / М.П. Белов. – М: Академия -2004. – 576 с.
6. Гусев В.Г, Гусев Ю.М. Электроника и микропроцессорная техника: учебник для студентов вузов / В.Г Гусев, Ю.М. Гусев. – М: Изд-во"Высшая школа". – 2005. – 790 с.
7. Пивняк Г.Г. Переходные процессы в системах электроснабжения : учебник для энергетических вузов. / Г.Г. Пивняк – М: Энергоатомиздат. – 2003.
8. Прохоров С. Г., Хуснутдинов Р. А. Электрические машины / Прохоров С. Г., Хуснутдинов Р. А. – М: Феникс. – 2012.
9. Рихтер Р. Электрические машины: в 4-х томах / Р. Рихтер. – М: Книга по требованию. – 2012.
10. Копылов И.П. Математическое моделирование электрических машин: учебник для студентов вузов. / И.П. Копылов. – М: Изд-во "Высшая школа". – 2001. – 327 с.
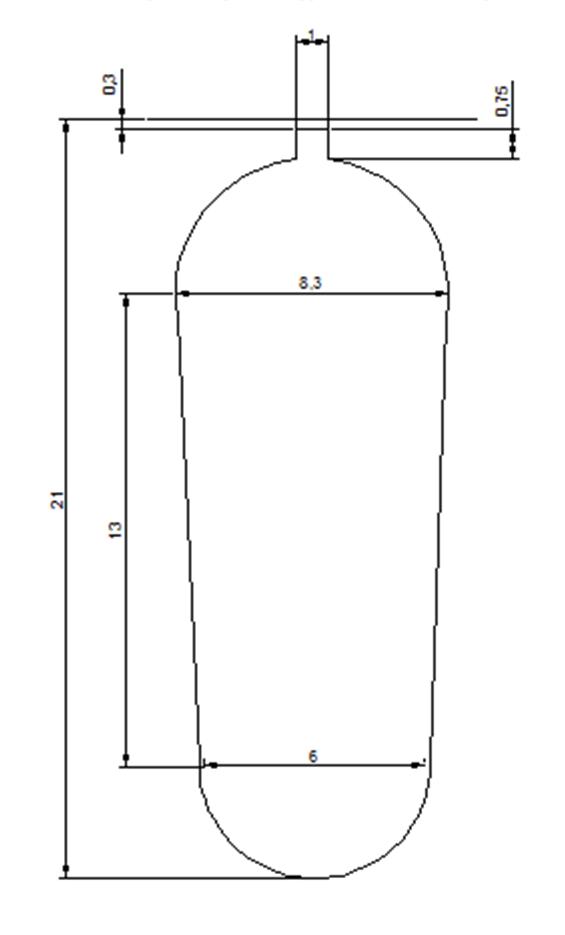
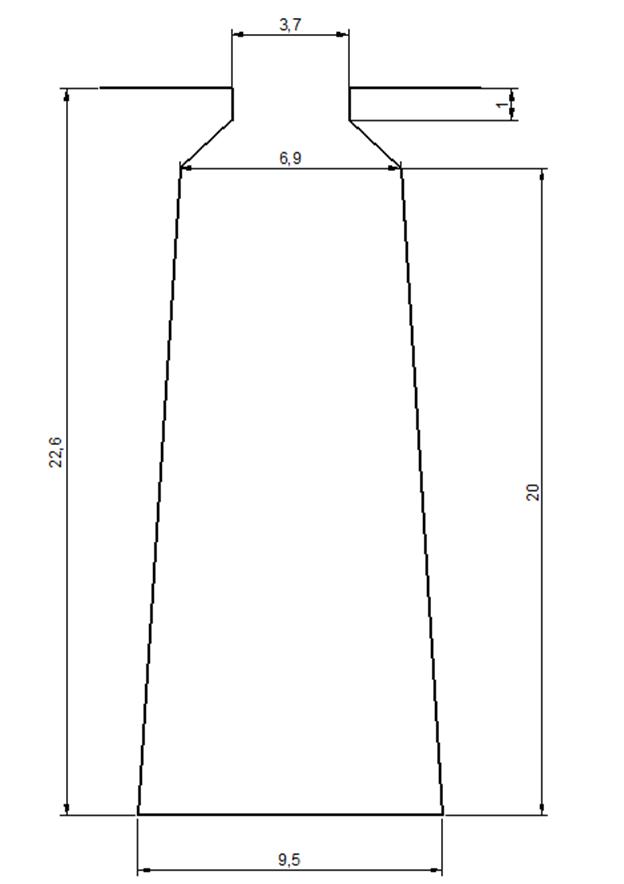
 (zip - application/zip)
(zip - application/zip)









