











Федеральное государственное бюджетное образовательное учреждение
Высшего профессионального образования «Вятский государственный университет»
(ФГОУ ВПО «ВятГУ»)
Факультет автоматики и вычислительной техники Кафедра электронных вычислительных машин
________________________________________________________________________________
_______
Реферат по дисциплине Алгебра и геометрия на тему:
«Преобразование координат. Изменение матрицы линейного оператора при переходе к новому базису. Решение систем линейных уравнений»
Выполнил студент группы ИВТ-11______________/Кузнецов А.Н./
Проверил старший преподаватель _______________/Серова А.С./
Киров 2012 г.
Содержание:
I. Преобразование координат……………………………………………..……….3
1. Параллельный перенос…………………………………………..….……….3
2. Поворот вокруг начала координат………………………...……….……….4
II. Изменение матрицы линейного оператора при переходе к новому базису……………………………………………………………...……………….5
III. Решение систем линейных уравнений……………………………..…………….6
1. Решение систем по формулам Крамера…………………………..………...6
2. Решение систем с помощью обратной матрицы……………..……...……..7
Список литературы…………………………………………………..……………. 8
I. Преобразование координат
I.1 Параллельный перенос
Преобразование декартовых прямоугольных координат при параллельном сдвиге осей определяется формулами:
x=x’+a
y=y’+b
Здесь ( х, у) и ( х", у" ) - координаты произвольной точки Р соответственно в старой и новой системе координат. Передвинем систему координат XОY в плоскости так, чтобы оси OX и OY оставались параллельны самим себе, а начало координат О сместилось в точку О" ( a, b ). Получим новую систему координат X"O"Y" ( рис.1 )
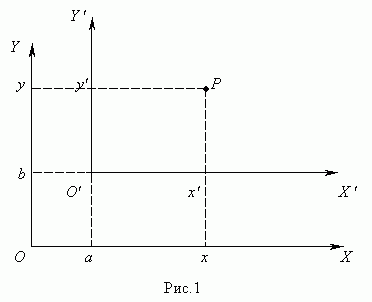
Координаты точки Р в новой и старой системе координат связаны соотношениями:

I.2 Поворот вокруг начала координат
Повернём систему координат XОY в плоскости на угол  ( рис.2 )
( рис.2 )
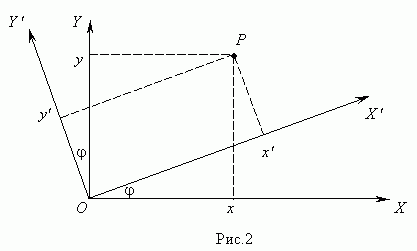
Теперь координаты точки Р в новой и старой системе координат связаны соотношениями:

В частном случае  получим центральную симметрию относительно начала координат О :
получим центральную симметрию относительно начала координат О :

II. Изменение матрицы линейного оператора при переходе к новому базису
Пусть V – линейное пространство, А – линейный оператор из ,
,  и
и  – два базиса в V и
– два базиса в V и  – формулы перехода от базиса
– формулы перехода от базиса к базису
к базису . Обозначим через
. Обозначим через  матрицу перехода от базиса к базису. Отметим, что ранг матрицы С равен n. Пусть
матрицу перехода от базиса к базису. Отметим, что ранг матрицы С равен n. Пусть  и
и – матрицы оператора А в указанных базисах.
– матрицы оператора А в указанных базисах.
Теорема.Матрицы А и  оператора А в базисах и связаны соотношением
оператора А в базисах и связаны соотношением .
.
Доказательство. При воздействии линейного оператора А вектор пространства V переводится в вектор
пространства V переводится в вектор  этого пространства, т.е. справедливо равенство
этого пространства, т.е. справедливо равенство
 (7.3)
(7.3)
(в старом базисе) и равенство
 (7.4)
(7.4)
(в новом базисе). Так как  – матрица перехода от старого базиса к новому, то
– матрица перехода от старого базиса к новому, то
 (7.5)
(7.5)
 (7.6)
(7.6)
Умножим равенство (7.5) слева на матрицу  , получим
, получим  и с учетом (7.3)
и с учетом (7.3)  . Заменив левую часть полученного выражения в соответствии с (7.6), получим:
. Заменив левую часть полученного выражения в соответствии с (7.6), получим:  или
или . Сравнивая найденное выражение с равенством (7.4), получим доказываемую формулу.
. Сравнивая найденное выражение с равенством (7.4), получим доказываемую формулу.
Отсюда следует, что определитель матрицы линейного оператора не зависит от базиса.
III. Решение систем линейных уравнений
II.1 Решение системы по формулам Крамера
Рассмотрим систему уравнений: 
На первом шаге вычислим определитель, его называют главным определителем системы.

Если  , то система имеет бесконечно много решений или несовместна (не имеет решений). В этом случае правило Крамера не поможет, нужно использовать метод Гаусса.
, то система имеет бесконечно много решений или несовместна (не имеет решений). В этом случае правило Крамера не поможет, нужно использовать метод Гаусса.
Если  , то система имеет единственное решение, и для нахождения корней мы должны вычислить еще два определителя:
, то система имеет единственное решение, и для нахождения корней мы должны вычислить еще два определителя:
 и
и 
Корни уравнения находим по формулам:
 ,
,
Пример
Решить систему линейных уравнений



Ответ:  ,
,
II.2 Решение системы с помощью обратной матрицы
Пример.
Решить систему с матричным методом: 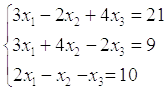
Решение: Запишем систему в матричной форме:
 , где
, где  ,
, ,
,
Решение системы найдем по формуле: 
Обратную матрицу найдем по формуле:

, где – транспонированная матрица алгебраических дополнений соответствующих элементов матрицы А.
– транспонированная матрица алгебраических дополнений соответствующих элементов матрицы А.
Вычислим определитель матрицы А:
 Вычислим транспонированную матрицу алгебраических дополнений:
Вычислим транспонированную матрицу алгебраических дополнений:
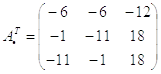
Теперь записываем обратную матрицу:


Ответ: 
Список литературы
1) Сборник задач по аналитической геометрии Д.В. Клетеник 1980г
2) Сборник задач по математике А.В. Ефимова 2003г
3) Сборник задач по высшей математике К.Н. Лунгу 2008г
 (zip - application/zip)
(zip - application/zip)









