












ВСТУП
В даний час тваринницькі ферми і комплекси, птахофабрики мають значну кількість електрифікованих машин, агрегатів і поточних ліній, що дозволяє механізувати основні технологічні процеси, а в ряді випадків забезпечити комплексну механізацію і автоматизацію більшості виробничих процесів.
Тенденціями сучасного сільськогосподарського виробництва є, з одної сторони постійний ріст його масштабів, підвищення кількості та якості сільськогосподарського продукту, з другої, прогресуючий дефіцит робочої сили, підвищена непопулярність монотонної та важкої праці в рослинництві та тваринництві. Найважливішим, а інколи єдиним способом вирішення суперечок між ними являється комплексна механізація і автоматизація виробництва.
Швидкий ріст технічної і енергетичної озброєності сільськогосподарської продукції, стрімкий розвиток наукових досліджень з використанням сучасних наукових пристроїв, широке використання досягнень напівпровідникової електроніки і диспетчерського управління, перехід на промислову основу виробництва тваринницької і рослинної продукції на базі комплексної механізації і електрифікації технологічних процесів підготовки, необхідні умови для автоматизації практично всіх технологічних процесів сільськогосподарського виробництва.
Автоматизація сільськогосподарського виробництва підвищує надійність і продовжує час роботи обладнання, полегшує і оздоровлює умови праці, підвищує безпеку праці і робить її більш престижною і економить затрати праці, збільшує кількість і підвищує якість продуктів виробництва, прискорює процес стирання відмінностей між розумовою працею і фізичною, промисловою і сільськогосподарською.
1. ОБГРУНТУВАННЯ ПРОЕКТУ.
Процес роздачі кормів є одним із трудомістких на тваринницьких та птахівницьких фермах. Технологія роздачі кормів знаходиться в тісному зв"язку з загальним технологічним циклом, прийнятим на фермі. Головною умовою оптимальності годування тварин є збалансованість кормів і необхідна періодичність та дозованість їх видачі.
Потребу в кормороздавальних пристроях, їх марку та кількість визначають з урахуванням виду та віку тварин і птахів, способів їх утримання, раціонів годування, норм видачі корму одній тварині, розрахункового поголів’я тварин. Для роздачі корму на фермах використовують, як мобільні, обмежено-мобільні і стаціонарні кормороздавачі.
У таких системах як правило відбувається
об"єднання декількох технологічних операцій у загальну потокову лінію з
місцевим, дистанційним та автоматизованим керуванням електроприводами машин і
механізмів. Найчастіше спільно проектуються лінії транспортування і роздачі
кормів. Системи автоматизації повинні забезпечувати послідовність автоматичного
і ручного включення машин і механізмі в порядку, зворотному напрямку руху
корму, щоб виключити завал машини, зупинку потокової лінії в заданій
послідовності у випадку аварійної зупинки однієї з машин; контроль і сигналізацію
роботи всіх машин і механізмів.
Для роздачі кормів в свинарнику маточнику вибираємо тросошайбовий кормороздавач
з технічною характеристикою яка наведена в таблиці 1,1
Таблиця 1,1 Технічна характеристика лінії кормороздачі
|
Назва параметра |
Величина |
|
Об’єм бункера м3, Кількість бункерів Довжина тросошайбового транспортера, м Діаметр кормових труб , мм Кількість поворотних пристроїв Тип електродвигуна Потужність електродвигуна, кВт; Номінальний струм електродвигуна, А; Коефіцієнт потужності; Коефіцієнт корисної дії, %; Кратність пускового струму; |
19 2 183 57 8 AИР80А4У2 1,1 2,75 0,81 75 5,5 |
2. ТЕХНОЛОГІЧНА ХАРАКТЕРИСТИКА ОБЄКТА АВТОМАТИЗАЦІЇ
Тросово-шайбові кормороздавачі використовують для нормованої годівлі сухими комбікормами в тваринницьких і птахівничих приміщеннях.
Кормороздавач складається з тросошайбового кармороздавача , бункера сухих кормів БСК, в якому знаходяться датчики рівня , натяжного пристрою електродвигуна з редуктором , годівниць з дозаторами .
Згідно з технологічною схемою автоматизації управління роздачею кормів здійснюється так. З бункера БСК 1, що знаходиться поза тваринницьким приміщенням, корм переміщується по кормопроводу тросово-шайбовим транспортером 10. Через отвори в кормопроводі комбікорм просипається в індивідуальні (групові) дозатори 9. В останньому індивідуальному дозаторі встановлено датчик рівня 7. Видача корму виконується по команді від програмного пристрою в установлений час, шляхом ввімкнення електродвигуна 4 приводу кормороздавача. Контроль рівня кормів в бункері контролюється за допомогою датчиків рівня 1,2, а наявність корму в дозаторі останньої годівниці датчиком 7. Натяг тросу кормороздавача контролюється кінцевим вимикачем 6.
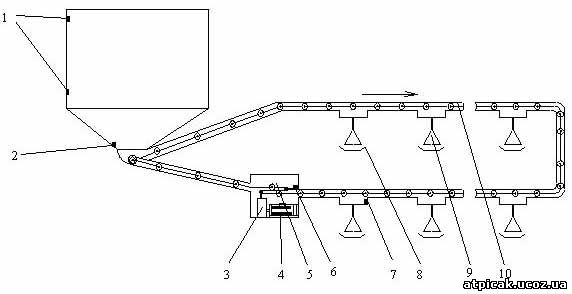
Рисунок 2.1. Технологічна схема тросошайбового кормороздавача.
1- датчики рівня в бункері (повний і допустимий рівень); 2 – датчик нижнього рівня; 3 – редуктор; 4 – електродвигун; 5 – натяжний пристрій; 6 – кінцевий вимикач; 7 – датчик рівня в годівниці; 8 – годівниця; 9 – дозатор годівниці; 10 – тросошайбовий кормороздавач.
3. РОЗРОБКА ТА АНАЛІЗ СХЕМ АВТОМАТИЗАЦІЇ
3.1. Розробка та аналіз структурної схеми
Об’єкти автоматизації характеризуються вхідними, вихідними параметрами та параметрами, що визивають обурення. Для того щоб показати ці параметри ми виконаємо структурну схему.
Рисунок 3,1
3.2. Розробка та аналіз функціональної схеми
Функціональна схема показує функціональне призначення елементів, пристроїв схеми керування, їх взаємозв’язок з вказуванням виду передаваємої величини використовуючи умовні позначення.
3.3. Розробка та аналіз функціонально-технологічної схеми
Функціонально-технологічна схема (ФТС) автоматизації відображає технічні рішення автоматизації конкретних технологічних процесів. Вона виконується для кожної дільниці виробництва окремо і містить машино-апаратну схему технологічного процесу, на якій за допомогою умовних позначень відображають пристрої керування, прилади і засоби автоматизації і зв’язки між ними, які визначають в цілому принципи побудови системи автоматичного контролю і керування об’єктом.
3.4. Розробка та аналіз принципової електричної схеми
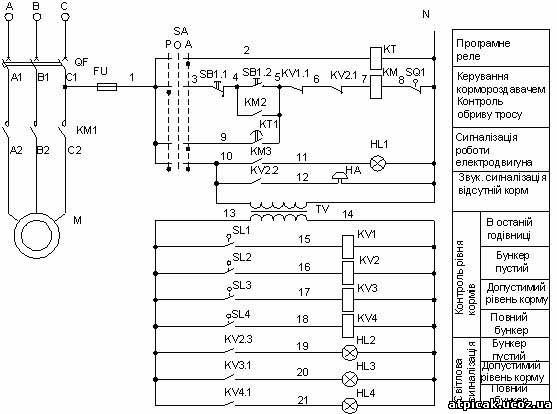
Рисунок. 4. Принципова електрична схема тросошайбового кормороздавача
Принципова електрична схема тросошайбового кормороздавача для роздачі комбікормів показана на листі 1 графічної частини
Робота кормороздавача передбачена в двох режимах, ручному і автоматичному. Режими задаються перемикачем SА.
В ручному режимі перемикач встановлюємо в положення «Р». Вмикання електродвигуна кормороздавача здійснюємо за допомогою кнопки SВ1.2., при натисканні якої подається напруга на котушку магнітного пускача КМ, який силовими контактами вмикає подає напругу на електродвигун, а додатковими контактами КМ1 блокує кнопку SВ1.2. Сигналізація роботи електродвигуна здійснюється за допомогою лампочки НL1.
Вимикання електродвигуна кормороздавача в ручному режимі здійснюється кнопкою SВ1.1.
В автоматичному режимі перемикач SА встановлюємо в положення «А». В цьому положенні перемикача отримає живлення котушка програмного реле часу КТ, яке своїми контактами КТ1 подає живлення на котушку магнітного пускача КМ електродвигуна кормороздавача М. при заповненні кормом останньої годівниці спрацьовує контактний датчик рівня SL1, який подає напругу на котушку проміжного реле КV1. Контакти реле КV1.1. розмикаються в колі котушки КМ, що призводить до вимикання магнітного пускача і електродвигуна кормороздавача М.
При закінчені кормів в бункері контактний датчик рівня SL2 подає напругу на котушку проміжного реле КV2, яке своїми контактами КV2.1 вимикає магнітний пускач і електродвигун кормороздавача М. Контакти реле КV2.2. подають напругу на дзвоник НА, для повідомлення персоналу про відсутність кормів в бункері. Контакти реле КV2.3 подають напругу на сигнальну лампу НL2, яка сигналізує про закінчення кормів в бункері.
Контактний датчик рівня SL3 подає напругу на котушку проміжного реле КV3, який своїми контактами вмикає сигнальну лампу НL3. Вона сигналізує про достатній рівень корму в бункері для добової годівлі тварин.
Про заповнений бункер кормом здійснює сигналізацію контактний датчик рівня SL4, який за допомогою проміжного реле КV4 вмикає сигнальну лампу HL4.
Кінцевий вимикач SQ контролює натяг тросу кормороздавача. При ослаблені або обриві контакти SQ розмикаються, магнітний пускач КМ вимикається і вимикається електродвигун приводу кормороздавача М.
4. РОЗРАХУНОК ТА ВИБІР ЕЛЕКТРООБЛАДНАННЯ СХЕМИ КЕРУВАННЯ.
4.1. Розрахунок і вибір пускових і захисних апаратів.
Вибираємо автоматичний вимикач для для захисту двигуна з Iн.дв = 2,75А за умовами:
номінальна напруга автомата повинна бути більша або рівна напрузі мережі Uн.авт. >Uн.м.;
номінальний робочий струм автоматичного вимикача повинен бути більшим або рівним за сумарний струм навантаження ,але він комутує Iн.авт.. >Iн.дв.;
номінальний струм розчіплювала автоматичного вимикача повинен бути більшим або рівним від сумарного струму навантаження Iрозч.авт. >Iн.дв..
Цим умовам відповідає автоматичний вимикач ВА51Г-25340010Р-54УХЛ3, який має номінальний струмIн.авт = 25А; струм розчіплювачаIрозч.авт. = 3,15А і перевіряємо по умовах:
660В> 380В; 25А> 2,75А; 3,15А>2,75А.
Перевіримо автоматичний вимикач на не спрацювання при пуску електродвигуна по умові:
Iу.е.>kзап. · kр.у ·kр.п. ·Iн.дв ·kі
де kзап. – коефіцієнт запасу, який враховує коливання напруги, kзап. =1,1;
kр.у – коефіцієнт, що враховує неточність уставки за струмом спрацювання електромагнітного розчіплювача, Kр.у=1,2;
kр.п. –коефіцієнт, який враховує можливе відхилення пускового струму від його номінального,kр.п.=1,2;
kі - каталожна кратність пускового струму електродвигуна;
Iн.дв - номінальний струм двигуна, А.
Iу.е=14· Iрозч.авт=14 · 3,15 =44,1А.
44,1 > 1,1 · 1,2 ·1,2 · 2,75 · 5,5 = 24А
Умова виконується, отже автоматичний вимикач не спрацює при запуску двигуна.
Виберемо
електромагнітний пускач для двигуна з I н= 2,75 А за
умовами:
Uн.п.  Uн.м.;
Uн.м.;
Iн.п. Iн.дв.;
Iн.п  .
.
Умовам відповідає електромагнітний пускач типу ПМЛ-120002 із ступенем захисту IP-54 з номінальним струмом Iн.п. =10А ; 10А> 2,75А- друга умова виконується. Вибраний пускач перевіримо по забезпеченню надійності комутації:
. Iн.п .;
10А >  ;
;
10А > 2,52А.
Умова виконується, отже магнітний пускач вибраний вірно .
4.2. Вибір технічних засобів автоматизації.
|
В схемі керування кормороздавача використовуються такі засоби автоматизації; датчики рівня, реле часу, проміжне реле,кінцеві вимикачі. В схемі автоматизованого керування використовуються реле часу, яке вибираємо за умовами: - за витримкою
часу: Тр.ч. - за похибкою та інтервалом вставок; - за напругою живлення: Uр.ч. = Uкол.к. , де Uр.ч. – напруга реле часу; Uк.к. –напруга кола керування; - за видом і кількістю контактів; -
за
струмом контактів: Iкон. - способом монтажу; Цим умовам відповідає програмне реле часу 2РВМ, що має добову _рограмма на 24 години, напругу живлення – 220В, кількість контактів – 2 перемикаючих, струм контактів – 10А, мінімальна величина вставок на спрацювання першої програми – 30 хвилин, другої програми – 40 хвилин, діапазон вставок 15 і 20 хвилин, похибка за добу ±5 хвилин, спосіб монтажу – вертикальне. |
|
Проміжне реле вибирають за умовами: - за виконанням; - напругою котушки; Uкот.. = Uкол.к. , де Uкот. – напруга котушки реле; Uк.к.- напруга кола керування; - кількістю контактів; -
струмом
контактів Iкон. - за споживаною потужністю, яка повинна бути найменшою. Умовам вибору відповідають реле РП21-002О4А, та РП21-200О4А що мають напругу живлення котушок на 220В, по два перемикаючих, а другий два замикаючих контакти на струм 6А і споживаною потужністю до 6ВА. |
Кінцеві вимикачі вибирають за умовами:
- за виконанням кріплення;
- за кількістю полюсів;
- видом приводу;
- степеню захисту, кліматичним виконанням;
- комбінацією і струмом контактів;
- прямим робочим і повним ходом штока;
- зусиллям прямого спрацювання;
- напругою мережі.
Цим умовам відповідає кінцевий вимикач ВП21-21А1155У2.3, що має базове кріплення, один полюс, з приводом – штовхачем, степенем захисту ІР55, кліматичним виконанням У2, по одному замикаючому і розмикаю чому контакту на струм до 10А. Прямий хід штовхача 4,5 мм., повний хід штока 9,5 мм., із зусиллям прямого спрацювання 20Н.
Контактні датчики рівня вибирають залежно від параметрів контрольованої величини:
- виміряємо величина повинна входити в межі регулювання контактного датчика;
- похибка регулювання, клас точності повинен бути в допустимих межах;
- видом і потужністю контактів;
- габаритними розмірами, способом монтажу;
- виконанням.
Цим умовам відповідає контактний датчик рівня ДУМ-100К/ІІ, що спрацьовує при підвищенні зерна над центром мембрани на 100…150 мм. Тиск на мембрану при, якому спрацьовує мікроперемикач, становить 0,4…0,5Н. Контакти мікроперемикача допускають навантаження струмом до 2А при напрузі 220В.
Таблиця4.1 Специфікація на технічні засоби автоматизації
|
Позначення на ФТС |
Величина |
Значення величини |
Місце встановлення |
Характеристика |
Тип |
кількість |
|
Зусилля Час Напруга Рівень |
20Н 24 год 220В 100мм |
На установці Шафа керування Шафа керування На установці |
кінцевий вимикач має, 1 полюс, з приводом – штов хачем, захисту ІР55, по 1з. і 1р. Контакту на струм до 10А. Прямий хід 4,5 мм., пов ний хід 9,5 мм., із зусиллям прямого спрацювання 20Н. добова _рограмма на 24 год. Похибка ±5 хв., напруга живлення –220В, струм контактів – 10А, має 2 п контакт з затримкою діапазон вставок 15 і 20 хвилин напруга живлення котушок на 220В по 2 п. і 2 з. контакти на струм 6А і споживаною потужністю до 6ВА. Датчик рівня спрацьовує при підвищенні зерна над центром мембрани на 100…150 мм. Тиск на мембрану , становить 0,4…0,5Н. Контакти допускають навантаження струмом до 2А при напрузі 220В. |
ВП21-21А 1155У2.3, 2РВМ РП21-002О4А, РП21-200О4А ДУМ- 100К/ІІ |
1 1 4 4 |
4.3. Розрахунок і вибір пускових і сигналізуючи пристроїв.
|
В ручному режимі установка керується за допомогою кнопочного поста, який вибираємо за умовами: Uп >Uк; Iп>Iк; Де Uп і Iп – номінальна напруга та струм кнопок керування, Uк і Iк –напруга і струм кола керування, що кумутує кнопковий пост. Цим умовам відповідає кнопочного поста типу ПКЕ112-2У3, що монтується в спеціальній ніші , виготовлений з пластмаси, має два управляючих елемента, ступінь захисту із сторони управляючого елемента ІР40, а із сторони монтажу проводів –ІР00, кліматичне виконання та категорія розміщення –У3, номінальний струм контактів Iп =2А Визначаємо струм у колі керування по формулі: Ік=Sk/Uk; Де Sк – потужність, яку споживає котушка під час вмикання, для ПМЛ120002 , Sк =84ВА; Uк – напруга кола керування. Ік=84/220=0,38А. 2А>0,38А. Умова виконується, отже кнопковий пост вибраний вірно. |
|
|
Вибираємо пакетний перемикач за умовами: Uп>Uк; IпS >Iк; Де Uп і Iп – номінальна напруга та струм перемикача, Uк і Iк –напруга і струм кола, що кумутує перемикач. Визначаємо струм у колі керування по формулі: Ік=Sk/Uk; Де Sк – потужність, яку споживає котушка магнітного пускача під час вмикання, для ПМЛ120002Sк =84ВА; Uк – напруга кола керування. Ік=84/220=0,38А. Цим умовам відповідає пакетно – кулачковий перемикач серії ПКУ312У0067У3А, що має струм контактів до 10А, напруга до 500В, три полюса на чотири контакта. Монтується перемикач в передній панелі ящика керування. |
|
Світлова сигналізація вмикання установки та повідомлення про положення корма в бункері здійснюється за допомогою сигнальні лампи В220-230-15, що має потужність 15 Вт., світловий потік 105 лм.
Вибираємо запобіжники для захисту кола керування за умовами:
Uн.з..Uм ;
Iн.з..Iк.к..
Iнвст..з..Iк.к…
де ,Uн.з.. –номінальна напруга запобіжника;
Iн.з – номінальний струм запобіжника;
Iнвст..з - струм плавкої вставки запобіжника.
Цим умовам відповідає запобіжник ПРС-06У3-3 з плавкою вставкою ПВД- III-2У3, що має Uн.з..=380 В,
Струм запобіжника і плавкої вставки Iн.з = 6А; Iнвст..з..= 2 А.
660 380
В; 6 0.38
А ; 2 0,38А
.
Умови виконуються запобіжник вибрано вірно
Вибір трансформатора
5. РОЗРОБКА МОНТАЖНИХ СХЕМ
-
Перелік і розташування приладів в шафі керування.
- Нарисувати схему розташування приладів в шафі керування.
- Нарисувати схему внутрішніх з’єднань шафи керування на аркуші №2 графічної
частини.
- Нарисувати схему підключень шафи керування.
6. ВИЗНАЧЕННЯ ОСНОВНИХ ПОКАЗНИКІВ НАДІЙНОСТІ.
Надійність засобів і систем автоматизації характеризується рядом кількісних показників: імовірність безвідмовної роботи, інтенсивність відмов, середній наробіток на відмову, наробіток на відмову з заданою імовірність.
Інтенсивність відмов для кожного виду елементів вибираємо з таблиці 1.21 [Л-1], враховуючи коефіцієнт навантаження та температури, при яких дане електрообладнання використовується визначаємо по формулі
λ=к • λо ; ( 6.1 )
де, λо - інтенсивність відмов в нормальних умовах, год.-1;
к – поправочний коефіцієнт, який враховує коефіцієнт навантаження і температури;
к = кн • кт; ( 6.2)
де, кн – коефіцієнт навантаження, який залежить від умов при яких працює визначаємий елемент схеми, вибираємо з таблиці 1.22 [ Λ - 1 ] ;
кт – коефіцієнт температури, який залежить від температури і вологості в яких знаходиться елемент схеми, вибираємо з таблиці 1.23. [Λ-1].
Інтенсивність відмов для групи однотипних елементів визначаємо, враховуючи їх кількість, табличним методом (табл. 6.1).
Таблиця 6.1. Розрахунок інтенсивності відмов.
|
Назва елемента |
Позначення |
Кількість |
Інтенсивність відмов 10-6 год.-1 |
Коефіцієнт навантаження кн |
Режим роботи |
Поправочний коефіцієнт, к |
Інтенсивність відмов 10-6год.-1 |
||
|
Температура, оС |
Коефіцієнт температури, кт |
Для одного елемента |
Для групи елементів |
||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Вимикач автоматичний запобіжник Магнітний пускач Електродвигун Перемикач Кнопки керування Проміжне реле Лампи Дзвінок Кінцеві вимикачі Трансформатор Реле часу Датчик рівня |
QF FU КМ М SA SB KV HL HA SQ TV KT SL |
1 1 1 1 1 1 4 4 1 1 1 1 4 |
0,22 0,6 10 10 0.175 1.4 2 20 16 0.161 5 2.5 1.5 |
1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 1.07 |
16 16 16 16 16 16 16 16 16 16 16 16 16 |
1,4 1.4 1.4 1.4 1.4 1.4 1.4 1.4 1.4 1.4 1.4 1.4 1.4 |
1,49 1.49 1.49 1.49 1.49 1.49 1.49 1.49 1.49 1.49 1.49 1.49 1.49 |
0,33 0.89 14.9 14.9 0.26 2.08 3 30 23.8 0.24 7.45 3.7 2.2 |
0,33 0.89 14.9 14.9 0.26 2.08 12 120 23.8 0.24 7.45 3.7 8.8 |
Інтенсивність відмов установки складається з суми інтенсивностей відмов для групи елементів і позначаємо λΣ=208.45 • 10-6год-1.
Імовірність безвідмовної роботи визначаємо по формулі:
Р = е-λΣto ( 6.3)
Де, λΣ – загальна інтенсивність відмов, год-1;
tо – час, для якого визначається імовірність безвідмовної роботи, знаходимо по таблиці 1.20 [ Λ - 1 ] .
Р =
Середній наробіток на відмову визначаємо по формулі:
Т =1/ λΣ ; ( 6.4)
Т = 1 / = год.
Наробіток на відмову з заданою імовірністю визначаємо по формулі:
То = ℓn(р)/λΣ ; ( 6.5)
То = ℓn( )/ • 10-6 = год.
По розрахунках видно, що ненадійними елементами схеми керування кормороздавача будуть: сигнальні лампи та дзвінок. Для підвищення надійності установки потрібно зробити резерв цього обладнання в необхідній кількості для того, щоб установка працювала задану кількість часу.
7. ВИЗНАЧЕННЯ ЕКОНОМІЧНИХ ПОКАЗНИКІВ АВТОМАТИЗАЦІЇ ОБЄКТА.
.
(виділене червоним кольором не писати – це пояснення і силки )
Економічна ефективність автоматизації установки визначимо порівнянням двох варіантів, один із них без використання засобів автоматизації, другий з ними.
Визначимо капітальні витрати для двох варіантів. Капітальні витрати на технологічне обладнання визначаємо по узагальненим даним.
Середня вартість електросилової одиниці (електродвигуна, нагрівачів) з захисною апаратурою, установкою й наладкою становить 2500 грн. (узагальнена величина)
Загальні капітальні витрати визначаємо по формулі 7.1,
К1 = 2500 · nа (7.1)
де: nа- кількість одиниць силового обладнання в установці.(кількість двигунів, груп нагрівачів, груп освітлювального обладнання)
К1 =
Капітальні витрати на автоматизацію установки становить 10 – 40% від загальних витрат на технологічне обладнання і визначаємо по формулі 7.2:
К2 =2500 · nа ·Ка (7.2)
де: Ка –коефіцієнт, який залежить від кількості і складності технічних засобів автоматизації, які використовуються в установці, Ка = 1,1-1,4,
К2 =
Вартість електроенергії, яка використовується за рік установкою визначається за формулою 7. 3,
Сел= Аn· Со ; (7.3)
де: Со – тариф за електроенергію, грн./кВт·год, Со=------- грн/кВт·год;(приймається вартість електроенергії для с. г. споживачів 1 категорії. Дивись інтернет)
Аn– кількість споживаної електроенергії установкою за рік кВт.
Для розрахунків використовуємо формулу 7.4 (визначається для для кожного силового обладнання, потім додається)
Аn
=  ; (7.4.)
; (7.4.)
де, Р –потужність силового обладнання установки, кВт; (табл. 1.1)
Кз
– коефіцієнт завантаження; (табл.)
(табл.)
η –ККД двигуна, установки ; (табл1.1)
Т – час роботи установки за рік (час роботи, за добу перемножуємо на кількість днів роботи установки в рік) .
Аn =
Сел=
Заробітну плату на чергування одного робітника за рік визначаємо по формулі 7.5.
Сз.п.= З р ·Тр, (7. 5 )
де: Зр – ставка одного чергового робітника;
Тр - час роботи чергового робітника в рік на установці, год.
З
р= (7.
6 )
(7.
6 )
де: Зм – розмір мінімальної зарплати, Зм =____ грн/місяць; (дивись інтернет)
Кс - коефіцієнт співвідношення тарифної ставки робітника 1- го розряду і мінімального розміру тарифної ставки, який виконує некваліфікований робітник: в тваринництві –1,18, в рослинництві – 1,02, в ремонтних майстернях – 1,08;
Н – норма тривалості робочого часу в місяць при 40 годинному робочому тижні, Н = 166,83 год.
З р=
Тр = Д·Ф·Л, (7.7.)
де: Д –тривалість роботи робітника в день на установці, год; ( 1 робітника безпосередньо на установці при відсутності автоматизації)
Ф – річна кількість днів роботи установки; (356 днів)
Л – кількість робітників на установці. (1 варіант – неавтоматизовано, 2 варіан автоматизовано)
Тр1 =
Сз.п.1=
Тр2 =
Сз.п.2=
Відрахування на амортизацію становить 12% від капітальних вкладень на установку і визначається по формулі 7.8. ( для1 варіанту К береться по формулі 7.1, для 2 варіанту – по формулі 7.2)
Са = 0,12 · К ; (7. 8.)
Са.1 =
Са.2 =
Відрахування на поточний ремонт становить 3% від капітальних вкладень на установку і визначається по формулі 7.9.
Ср = 0, 03 · К ; (7.9)
Ср.1 =
Ср.2 =
Загальні річні експлуатаційні, витрати по кожному варіанту визначимо по формулі 7.10. (Сел для обох варіантів однакове)
С1 = Сел.1+ Сз.п.1 + Са.1 + Ср.1 (7.10.)
С2 =Сел.2 + Сз.п.2+ Са.2+ Ср.2
С1 =
С2 =
При порівнянні двох варіантів визначимо коефіцієнт порівняльної ефективності по формулі 7.11 ,
Е=
 ; (
7.11)
; (
7.11)
Е =
Якщо Е>Ен – нормативного коефіцієнта ефективності капітальних вкладень, Ен = 0,08 для сільського господарства – то варіант з більшими вкладеннями є економічно ефективним.
Економічну ефективність автоматизації установки визначаємо по формулі 7.12.
Ео = (С1 – С2) –Ен·(К2 – К1); (7.12)
Ео =
Зведені витрати на амортизацію визначаємо по формулі 7.13.
З п =Ен· К2+ С2 (7.13.)
З п =
Додаткову рентабельність при автоматизації визначаємо по формулі 7.14.
Р
= % ; (
7.14)
% ; (
7.14)
Р =
Строк окупності капітальних вкладень, які використані на автоматизацію установки визначимо по формулі 7.15.
Т
= ; (7.15)
; (7.15)
Т =
Про розрахунках видно, що при економічній ефективності __ грн. (формула 7.12) , засоби автоматизації окупляться з __ року (формула 7.15), тобто за _______місяців.
ВИСНОВКИ.
-
Вказати основні проектні рішення.
- Виводи про переваги, порівнявши з базовою.
- Перспективи в автоматизації технологічних процесів в сільськогосподарському
виробництві.
Список використаних джерел
 (zip - application/zip)
(zip - application/zip)









