











Вінницький національний технічний університет
Факультет комп’ютерних систем управління та автоматики
Кафедра автоматики та інформаційно-вимірювальної техніки
КУРСОВИЙ ПРОЕКТ
з дисципліни «Мікропроцесорні системи»
на тему: «МПС для управління вимірювання теператури»
Студента 3 курсу 1СІ-13б групи
напряму підготовки 6.050201«Системна інженерія»
спеціальності 7.05020101 «Комп’ютеризовані системи управління та автоматика»
Чайка Д.В.
Керівник доцент Компанець М.М.
Національна шкала ___________________
Кількість балів: _____ Оцінка: ECTS ____
Члени комісії ________________ __________________________
(підпис)
(прізвище та ініціали)
________________
__________________________
(підпис) (прізвище та ініціали)
________________ __________________________
(підпис) (прізвище та ініціали)
м. Вінниця – 2016 рік
Міністерство освіти і науки України
Вінницький національний технічний університет
Факультет комп’ютерних систем та автоматики
Кафедра автоматики та інформаційно-вимірювальної техніки
Затверджую
Зав. Кафедри АІВТ , д.т.н., проф. Р. Н. Квєтний
_____________ 27 січня 2016 р.
Індивідуальне завдання № 006
На курсовий проект з курсу «Мікропроцесорні системи»
Розробити: МПС для управління вимірювання температури
Вимоги до розробки:
− вимір температури;
− похибки - ±0,5%;
− індикація результатів вимірювання;
− характеристика датчика – лінійна.
Примітка:
1.  Провести аналіз методів вимірювання.
Провести аналіз методів вимірювання.
2. Виконати розрахунок похибки вимірювання.
Дата видачі «27» січня 2016 р.
Керівник проекту ___________
Завдання отримав ___________
Анотація
В даному курсовому проекті розроблено мпс для управління вимірюванням температури. Також виконано побудову структурної схеми, вибір елементної бази, оптимальною для реалізації поставлених завдань по дешевизні і діапазону характеристик, сформована структурна схема, яка в повній мірі показує роботу системи, також побудований алгоритм, і написана програма на мові асемблер.
 Аннотация
Аннотация
В данном курсовом проекте разработан мпс для управления измерением температуры. Также выполнено построение структурной схемы, выбор элементной базы, оптимальной для реализации поставленных задач по дешевизне и диапазона характеристик, сформирована структурная схема, которая в полной мере показывает работу системы, также построен алгоритм, и написана программа на языке ассемблера.
Annotation
In this course project developed by MPS to manage its
temperature. Also completed the construction of the block diagram, selection of
components, optimal for implementation of tasks for low cost and range of
features, formed a block diagram, which fully shows the system is also
constructed algorithm and program written in assembly language.
Зміст
ВСТУП.. 5
1. МЕТОДІВ ВИМІРЮВАННЯ ТЕМПЕРАТУРИ І ТЕМПЕРАТУРНИХ ШКАЛ.. 6
1.1 Аналіз давачів температури. 6
1.2 Аналіз методів вимірювання температури. 7
1.3 Класифікація приладів для вимірювання температури. 13
2. РОЗРОБКА МПС.. 15
2.1 Розробка схеми електричної структурної МПС.. 15
2.2 Розробка схеми електричної функціональної МПС.. 16
2.3 Розробка схеми електричної принципової МПС.. 17
2.3.1 Вибір пристрою відображення інформації 17
2.3.2 Аналіз вибору мікроконтролеру. 20
3. РОЗРОБКА ПРОГРАМНОГО ЗАБЕЗПЕЧЕННЯ.. 25
3.1 Розробка схеми роботи програми. 25
4. РОЗРОБКА МЕТРОЛОГІЧНОГО ЗАБЕЗПЕЧЕННЯ.. 26
5. РОЗРАХУНОК НАДІЙНОСТІ. 28
ВИСНОВОК.. 31
ЛІТЕРАТУРА.. 32
ДОДАТКИ.. 33
Додаток А (обов`язковий). Схема електрична структурна МПС.. 34
Додаток Б (обов`язковий). Схема електрична функціональна МПС.. 35
Додаток В (обов`язковий). Схема електрична принципова МПС.. 36
Додаток Г (обов`язковий). Перелік елементів. 37
Додаток Д (обов`язковий). Схеми функціонування програм.. 38
Додаток Е (обов`язковий). Лістинг програми. 39
ВСТУП
Роль і значення приладів для контролю температури в різних процесах загальновідомі.
На даному етапі в усьому світі в цілому і в нашій країні, зокрема, посилюється тенденція до широкого впровадження автоматизації та комп"ютеризації в різні сфери людської діяльності. Провідне місце в цьому займають сучасні технологічні процеси виробництва. Тут і виникає необхідність в автоматизації процесів вимірювання температури в різних великих промислових підприємств, обробки результатів з використанням ЕОМ або спеціальних пристроїв управління технологічними процесами.
В енергетичних установках і системах теплотехнічні вимірювання служать для безперервного виробничого контролю за роботою устаткування. При проведенні робіт з енергетичного аудиту різних систем, у яких основним об"єктивним показником відповідності їхніх експлуатаційних характеристики.
Але при всіх потребах стан на ринку приладів для контролю тмператури не залишає впевненості в задовільному стані.
 Метою даної роботи є створення саме
такого автоматичного малогабаритного вимірника для контролю рівня температури в великих
промислових підприємств технологічних
середовищ.
Метою даної роботи є створення саме
такого автоматичного малогабаритного вимірника для контролю рівня температури в великих
промислових підприємств технологічних
середовищ.
1.
 МЕТОДІВ ВИМІРЮВАННЯ ТЕМПЕРАТУРИ І ТЕМПЕРАТУРНИХ ШКАЛ
МЕТОДІВ ВИМІРЮВАННЯ ТЕМПЕРАТУРИ І ТЕМПЕРАТУРНИХ ШКАЛ
1.1 Аналіз давачів температури
Аналіз показує, що точність приладів вимірювання температури росте, однак похибка вимірювання температури зменшується мало, бо у вимірювальному каналі домінує позибка первинних давачів. А точність давачів температури, незважаючи на їх вдосконалення, за останні 30 років істотно не зросла.
Найпоширенішими контактними давачами температури є термоелектричні перетворювачі на базі термопар, які досліджували школи Львівської Політехніки і львівського НВО “Термоприлад”.
Термопари мають відносно великий початковий розкид функцій перетворення (ФП) і, внаслідок деградаційних процесів у електродах, значний дрейф ФП під дією високих температур і часу експлуатації. Відомі методи корекції дрейфу ФП термопар в часі, але також відомо, що для них найбільш небезпечною є похибка від набутої в процесі тривалої експлуатації термоелектричної неоднорідності їх електродів, яка викликає зміну термо-е.р.с. від зміни профілю температурного поля вздовж термоелектродів при сталих температурах робочого злюту і злютів порівняння. Відомі методи перерахунку похибки термопари з одного профілю температурного поля в інше не враховують можливу зміну характеру дрейфу при зміні температур ділянок. Тому задача боротьби з похибкою від термоелектричної неоднорідності електродів термопар не вирішена і вимагає додаткових досліджень.
Особливо необхідність в промислових вимірювачів температури відчу- вається в різноманітних галузях промислової індустрії таких як мікроелект- роніка, металургія, ядерна енергетика, теплотехніка, а також медицина .
За останні 25 – 30 років спостерігається інтенсивний розвиток датчиків на основі мікроелектроніки (інколи їх називають інтегральними або сенсора- ми, або мікроелектронні). Розробка мікроелектронних датчиків – це наукоє- мна область, вона синтезує досягнення механіки, фізики і хімії твердих тіл, рідин і газів, теплофізики, прикладної математики, теорії пружності, елект- роніки, метрології тощо і саме створення мікроелектронних датчиків стало можливим тільки на певному етапі розвитку науки, а також технології мікро- електроніки.
Сьогодні до мікроелектронних датчиків відносять напівпровідникові, тонко – і товстоплівкові, п’єзоелектричні, п’єзорезонансні, оптоелектронні, волоконооптичні датчики та інші.
На даний час в загальному об’ємі виробництва мікроелектронних датчи- ків домінують перші три типи датчиків, а в західній статистиці в мікроелект- ронних датчиках фігурують часто тільки напівпровідникові. Тому що це пов’язано в першу чергу з високим розвитком твердотільної технології.
Розробки і дослідження в області мікроелектроніки дозволило викорис- тати напівпровідникову і плівкову технології для виготовлення гігрометрів і термогігрометрів, які відповідають вимогам, що висуваються до сучасних за- собів вимірювання вологості та температури. До основних переваг мікроміні- атюрних гігрометрів відносять невеликі розміри, мале енергоспоживання, ви- соку чутливість, швидкодію, простоту конструкції, технологічність виготов- лення, а також низьку вартість.
1.2 Аналіз методів вимірювання температури
Виміряти температуру якого-небудь тіла безпосередньо, тобто так, як вимірюють інші фізичні величини, наприклад довжину, масу, об’єм або час, не представляється можливим, тому що в природі не існує еталона або зразка одиниці цієї величини. Тому визначення температури речовини роблять за допомогою спостереження за зміною фізичних властивостей іншого, так називаного термометричної речовини, яке наведе в зіткнення з нагрітим тілом, вступає з ним через якийсь час у теплову рівновагу. Такий метод вимірювання дає не абсолютне значення температури нагрітого середовища, а лише різницю щодо вихідної температури робочої речовини, умовно прийнятої за нуль.
Внаслідок зміни при нагріванні внутрішньої енергії речовини практично всі фізичні властивості останнього в більшому або меншому ступені залежать від температури, але для її вимірювання вибираються по можливості ті з них, які однозначно міняються зі зміною температури, не піддані впливу інших факторів і порівняно легко піддаються вимірюванням. Цим вимогам найбільше повно відповідають такі властивості робочих речовин, як об"ємне розширення, зміна тиску в замкнутому об’ємі, зміна електричного опору, виникнення термоелектрорушійної сили і інтенсивність випромінювання, покладені в основу улаштування приладів для вимірювання температури.
 Зміна агрегатного стану
хімічно чистої речовини (плавлення або затвердіння, кипіння або конденсація),
як відомо, протікає при постійній температурі, значення якої визначається
складом речовини, характером її агрегатної зміни і тиском. Значення цих відтворених
температур рівноваги між твердою і рідкою або рідкою і газоподібною фазами
різних речовин при нормальному атмосферному тиску, рівному 101325 Па (760 мм
рт. ст.), називаються реперними точками. Якщо прийняти як основу інтервал
температур між реперними точками плавлення льоду і кипіння води, позначивши їх
відповідно 0 і 100, у межах цих температур виміряти об"ємне розширення
якої-небудь робочої речовини, наприклад ртуті, що перебуває у вузькій
циліндричній скляній посудині, і розділити на 100 рівних частин зміну висоти її
стовпа, то в результаті буде побудована так називана температурна шкала.
Зміна агрегатного стану
хімічно чистої речовини (плавлення або затвердіння, кипіння або конденсація),
як відомо, протікає при постійній температурі, значення якої визначається
складом речовини, характером її агрегатної зміни і тиском. Значення цих відтворених
температур рівноваги між твердою і рідкою або рідкою і газоподібною фазами
різних речовин при нормальному атмосферному тиску, рівному 101325 Па (760 мм
рт. ст.), називаються реперними точками. Якщо прийняти як основу інтервал
температур між реперними точками плавлення льоду і кипіння води, позначивши їх
відповідно 0 і 100, у межах цих температур виміряти об"ємне розширення
якої-небудь робочої речовини, наприклад ртуті, що перебуває у вузькій
циліндричній скляній посудині, і розділити на 100 рівних частин зміну висоти її
стовпа, то в результаті буде побудована так називана температурна шкала.
 Для вимірювання температури, що лежить
вище або нижче обраних значень реперних точок, отримані поділення наносять на
шкалі і за межами відміток 0 і 100. Поділки температурної шкали називаються
градусами.
Для вимірювання температури, що лежить
вище або нижче обраних значень реперних точок, отримані поділення наносять на
шкалі і за межами відміток 0 і 100. Поділки температурної шкали називаються
градусами.
При побудові зазначеної температурної шкали була довільно прийнята пропорційна залежність об"ємного розширення ртуті від температури, що, однак, не відповідає дійсності, особливо при температурах вище 100 градусів. Тому за допомогою такої шкали можна точно виміряти температуру тільки у двох вихідних точках 0 і 100 градусів, тоді як результати вимірювання у всьому іншому діапазоні шкали будуть неточні. Те ж явище спостерігалося б і при побудові температурної шкали з використанням інших фізичних властивостей робочої речовини, таких, як зміна електричного опору провідника, збудження термоелектрорушійної сили і т.п.
Користуючись другим законом термодинаміки, англійський фізик Кельвін в 1848 р. запропонував дуже точну і рівномірну, що не залежить від властивостей робочої речовини шкалу, яка отримала назву термодинамічної температурної шкали (шкали Кельвіна). Остання заснована на рівнянні термодинаміки для оборотного процесу (циклу Карно).
Термодинамічна температурна шкала починається з абсолютного нуля і у цей час є основною. Одиниці термодинамічної температури позначаються знаком К (кельвін), а умовне значення її буквою Т.
На Генеральній конференції по мірах і вагам Міжнародний комітет мір і ваг прийняв нову практичну температурну шкалу 1968 р. (МПТШ-68), градуси якої позначаються знаком °С (градус Цельсія), а умовне значення температури - буквою I. Для цієї шкали градус Цельсія дорівнює градусу Кельвіна.
Крім Міжнародної практичної температурної шкали існує ще шкала Фаренгейта, запропонована в 1715 р. Шкала побудована шляхом поділення інтервалу між реперними точками плавлення льоду і кипіння води на 180 рівних частин (градусів), позначуваних знаком °Ф. По цій шкалі точка плавлення льоду дорівнює 32, а кипіння води 212°Ф.
Для перерахування температури, вираженої в Кельвінах або градусах Фаренгейта, у градуси Цельсія користуються рівнянням
і0С = Т К-273,15 = 0,556 (п°Ф - 32), (4.1)
де п — число градусів по шкалі Фаренгейта.
Радіометричні методи базуються в основному на сучасних дослідження складу, структури і властивостей речовин. В радіометричних (ядернофізичних) методах використовуються різні види ядерних випромінювань (гамма-промені, бета-частинки, швидкі нейтрони) і взаємодій (поглинання і розсіювання гамма- і бета-випромінювань, пружне розсіювання швидких нейтронів).
В основі методу ядерного магнітного резонансу (ЯМР) лежить резонансне поглинання радіочастотної енергії ядрами атомів водню (протонами) води при розміщенні вологого матеріалу в магнітне поле. Явище ЯМР пов’язане з квантовими переходами між енергетичними рівнями атомних ядер, що виникають в результаті ядерного магнітного моменту з зовнішнім магнітним полем.
Кондуктометричні методи основані на вимірюванні електричної провідності матеріалу при постійному і змінному струмі промислової або звукової частоти.
 Вологовмістимі
матеріали, які в сухому вигляді є діелектриками, при зволоженні стають
напівпровідниками. Питомий опір змінюється, відповідно, в залежності від вологи
в надзвичайно широкому діапазоні, що охоплює 12-18 порядків. Неоднорідність
діелектрика, наявність в ньому вологи впливають не тільки на величину питомої
провідності, але і на якісні властивост.
Вологовмістимі
матеріали, які в сухому вигляді є діелектриками, при зволоженні стають
напівпровідниками. Питомий опір змінюється, відповідно, в залежності від вологи
в надзвичайно широкому діапазоні, що охоплює 12-18 порядків. Неоднорідність
діелектрика, наявність в ньому вологи впливають не тільки на величину питомої
провідності, але і на якісні властивост.
Методи НВЧ-вологометрії. Ці методи поділяються на дві групи – основані на вимірюванні характеристик поля стоячих хвиль; основані на вимірюванні характеристик поля хвиль, що пройшли через вологий матеріал (оптичні методи).
 До першої групи
методів належать: оснований на вимірюванні поля стоячої хвилі в зразку
матеріалу, що досліджують. Оснований на визначенні діелектричної проникності
вологого матеріалу, яка є функцією вологовмісту, за результатами вимірювання
фазової частки сталої розповсюдження. Вимірювання зводяться до визначення
довжини хвиль в системі без діелектрика і з діелектриком; оснований на вивченні
поля стоячих хвиль, що виникають при відбиванні електромагнітної енергії від
зразка, досліджуваного матеріалу. Суть методу полягає в визначенні сталої
розподілу в зразку досліджуваного матеріалу шляхом вивчення розподілу стоячої
хвилі на ділянці лінії, що незаповнена діелектриком; оснований на використанні
хвиль, відбитих від поверхні досліджуваного зразка. В цьому випадку для
визначення діелектричної проникності використовують параметри хвиль, що
виникають в результаті взаємодії падаючої і відбитої хвиль; оснований на
вимірюванні параметрів резонатора при внесенні в нього досліджуваного
матеріалу. Вимірюючи частоти резонатора, визначають діелектричну проникність,
а, знаючи добротність, визначають коефіцієнт втрат.
До першої групи
методів належать: оснований на вимірюванні поля стоячої хвилі в зразку
матеріалу, що досліджують. Оснований на визначенні діелектричної проникності
вологого матеріалу, яка є функцією вологовмісту, за результатами вимірювання
фазової частки сталої розповсюдження. Вимірювання зводяться до визначення
довжини хвиль в системі без діелектрика і з діелектриком; оснований на вивченні
поля стоячих хвиль, що виникають при відбиванні електромагнітної енергії від
зразка, досліджуваного матеріалу. Суть методу полягає в визначенні сталої
розподілу в зразку досліджуваного матеріалу шляхом вивчення розподілу стоячої
хвилі на ділянці лінії, що незаповнена діелектриком; оснований на використанні
хвиль, відбитих від поверхні досліджуваного зразка. В цьому випадку для
визначення діелектричної проникності використовують параметри хвиль, що
виникають в результаті взаємодії падаючої і відбитої хвиль; оснований на
вимірюванні параметрів резонатора при внесенні в нього досліджуваного
матеріалу. Вимірюючи частоти резонатора, визначають діелектричну проникність,
а, знаючи добротність, визначають коефіцієнт втрат.
Друга група методів основана на досліджуванні характеристик електромагнітної хвилі, що пройшла через зразок досліджуваного матеріалу, шляхом порівняння з характеристиками хвилі, що розповсюджується іншим шляхом, або хвилі, що розповсюджується тим же шляхом, але при відсутності матеріалу. Вимірювання зводяться до визначення комплексного коефіцієнта передачі ділянки направляючої системи, заповненої досліджуваною речовиною (коефіцієнтом поглинання і відбивання, як функції вологовмісту). Такою ж системою може бути як хвильовід, частково або повністю заповнений матеріалом, так і зона вільного простору, в якій розповсюджуються електромагнітні коливання НВЧ.
Усі методи вимірювання температури можна розділити на дві великі групи – контактні і безконтактні. Залежно від мето-ду прилади для вимірювання температури підрозділяють також на контактні (термометри) і безконтактні (пірометри).
При вимірюванні температури вони безпосередньо контак-тують з об’єктом. Вимірювання засноване на визначеній залеж-ності від температури фізичної властивості об’єкта, а саме: теп-лового розширення рідини, електричного опору.
Термометри масового виробництва засновані саме на цих фізичних власти-востях і за принципом дії їх класифікують на рідинні, маномет-ричні, термоелектричні і термометри опору. Вибір того або іншо-го термометра залежить від цілей вимірювання, об’єкта, діапазону вимірюваних температур, необхідної точності вимі-рювань й інших чинників.
 Рідинні термометри засновані на зміні об’єму спеціальної термометричної
рідини залежно від температури. Рідина зна-ходиться в скляному резервуарі,
з’єднаному з капіляром, із яким зв’язана температурна шкала. Унаслідок різниці
теплового роз-ширення рідини і скла при зміні температури змінюється ви-сота
стовпчика рідини, що знаходиться в капілярі. Оскільки скляний резервуар і капіляр
безпосередньо впливають на по-казання рідинних термометрів, їх називають за
цією конструк-тивною особливістю скляними. Залежно від виду термометрич-ної
рідини скляні термометри випускають ртутними і нертутними. Ртутні термометри
мають діапазон вимірювань від -35 до 650 °С , нертутні — від -200 до 200 °С.
Точність цих тер-мометрів залежить від інтервалу вимірюваних температур і ціни
ділення шкали. Наприклад, при ціні ділення шкали 1 °С для температур від -35 до
0 °С допускається максимальна погрішність ±1 °С, а для температур 300 ... 400
°С – ±4 °С. Рідинні термометри завдяки простоті конструкції й обігу, не-високій
вартості широко застосовують для технічних і лабора-торних вимірювань.
Термометри різного призначення мають окремі конструктивні особливості.
Рідинні термометри засновані на зміні об’єму спеціальної термометричної
рідини залежно від температури. Рідина зна-ходиться в скляному резервуарі,
з’єднаному з капіляром, із яким зв’язана температурна шкала. Унаслідок різниці
теплового роз-ширення рідини і скла при зміні температури змінюється ви-сота
стовпчика рідини, що знаходиться в капілярі. Оскільки скляний резервуар і капіляр
безпосередньо впливають на по-казання рідинних термометрів, їх називають за
цією конструк-тивною особливістю скляними. Залежно від виду термометрич-ної
рідини скляні термометри випускають ртутними і нертутними. Ртутні термометри
мають діапазон вимірювань від -35 до 650 °С , нертутні — від -200 до 200 °С.
Точність цих тер-мометрів залежить від інтервалу вимірюваних температур і ціни
ділення шкали. Наприклад, при ціні ділення шкали 1 °С для температур від -35 до
0 °С допускається максимальна погрішність ±1 °С, а для температур 300 ... 400
°С – ±4 °С. Рідинні термометри завдяки простоті конструкції й обігу, не-високій
вартості широко застосовують для технічних і лабора-торних вимірювань.
Термометри різного призначення мають окремі конструктивні особливості.
Залежно від розташування шкали термометри бувають па-личні,, у яких шкала нанесена безпосередньо на поверхню кап-іляра у вигляді насічки по склу, і з вкладеною шкалою, нанесе-ною на прямокутну пластинку за капіляром. Паличні прилади більш точні, але менш зручні для спостереження показань. За формою хвостової частини термометри поділяють на прямі і кутові, нижня частина яких вигнута під кутом 90°. Для фіксу-вання досягнутих за визначений час максимальних значень температури служать максимальні термометри, а мінімальних
1.3 Класифікація приладів для вимірювання температури
 Прилади для вимірювання
температури розділяються залежно від використовуваних ними фізичних властивостей
речовин на наступні групи з діапазоном показань:
Прилади для вимірювання
температури розділяються залежно від використовуваних ними фізичних властивостей
речовин на наступні групи з діапазоном показань:
Термометри розширення (-190…+6500С) засновані на властивості тіл змінювати під дією температури свій об’єм.
Манометричні термометри (-160…+6000С) працюють за принципом зміни тиску рідини, газу або пари з рідиною в замкнутому об’ємі при нагріванні або охолодженні цих речовин.
Термометри опору (-200…+6500С) засновані на властивості металевих провідників змінювати залежно від нагрівання їхній електричний опір.
Термоелектричні термометри (-50…+18000С) побудовані на властивості різнорідних металів і сплавів утворювати в парі (спаї) термоелектрорушійну силу, що залежить від температури спаю.
Пірометри (-30…+60000С) працюють за принципом вимірювання випромінюваної нагрітими тілами енергії, що залежить від температури цих тіл.
Термометри розширення. Фізична властивість тіл змінювати свій об’єм залежно від нагрівання широко використовується для вимірювання температури. На цьому принципі заснований пристрій рідинних скляних і дилатометричних термометрів, які з"явилися дуже давно і послужили для створення перших температурних шкал.
В рідинних термометрах, побудованих на принципі теплового розширення рідини в скляному резервуарі, як робочі речовини використовуються ртуть і органічні рідини — етиловий спирт, толуол і ін. Найбільш широке застосування одержали ртутні термометри, що мають у порівнянні з термометрами, заповненими органічними рідинами, істотні переваги: великий діапазон вимірювання температури, при якому ртуть залишається рідкою, незмочення скла ртуттю, можливість заповнення термометра хімічно чистою ртуттю через легкість її одержання та ін. При нормальному атмосферному тиску ртуть перебуває в рідкому стані при температурах від -39 (точка замерзання) до 357°С (точка кипіння) і середній температурний коефіцієнт об"ємного розширення 0,18· 10-3К-1.
Термометри з органічними рідинами здебільшого придатні лише для вимірювання низьких температур у межах до 100°С. Рідинні термометри, виготовлені зі скла, є місцевими приладами, що показують. Вони складаються з резервуара з рідиною, капілярної трубки, приєднаної до резервуара і закритої із протилежного кінця, шкали і захисної оболонки.
 |
2.  РОЗРОБКА МПС
РОЗРОБКА МПС
2.1 Розробка схеми електричної структурної МПС
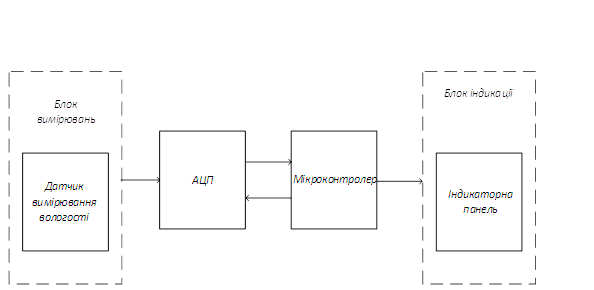
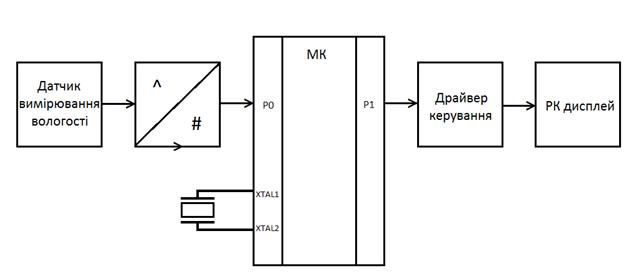
Центральною частиною приладу має бути мікроконтролер, який управляє роботою усього пристрою, здійснює збір і обробку інформації, що поступає з датчиків вимірюваних величин, видає оброблену інформацію на індикацію. Для контролю часу в мікроконтролер вбудовані годинник реального часу.
У пристрої застосована динамічна індикація, яка являє собою індикаторну панель. Для вибору індикатора код, що відповідає його номеру надходить з мікроконтролера на аноди індикаторів одночасно з кодом цифри, що відображається на цьому індикаторі, який надходить з мікроконтролера. Мікроконтролер формує сигнал вибору індикатора (низький рівень - індикатор вибрано).
Блок вимірів складається зі схеми виміру – схеми виміру температури. Схема будується на відповідному датчику. Аналогові сигнали з блоку вимірів поступають для оцифрування на АЦП. З АЦП цифровий сигнал поступає на мікроконтролер для наступної обробки.
Кожен блок може бути замінений на іншій, функціонально-сумісний з ним. Природно, при цьому потрібне узгодження вхідних і вихідних параметрів блоків.
Схема електрична структурна зображена у додатку А.
Функціонування приладу повинне здійснюватися таким чином:
Блок живлення перетворить напругу мережі в необхідну для роботи приладу напругу.
Є датчик для виміру темпратури. Вихідні сигнали датчиків - аналогові. Для вирішення поставленого завдання необхідно оперувати цифровими даними. Тому в схему включаємо аналого-цифровий перетворювач. Для виміру вказаної в завданні фізичної величини існує достатній вибір датчиків різних фірм. Проте досить складно підібрати усі датчики так, щоб вони співпадали з вхідним діапазоном АЦП. Окрім цього деякі датчики вимагають наявності певних зовнішніх ланцюгів, наприклад, схеми збудження, калібрування і тому подібне. Тому неминуча поява додаткових елементів, схем і ланцюгів, які потрібні для коректної роботи усього пристрою.
Датчик температури не вимагає яких-небудь зовнішніх ланцюгів узгодження, оскільки добре узгоджується з АЦП, як по діапазону, так і по чутливості.
Мікроконтролер обробляє отриману інформацію і видає її на блок індикації.
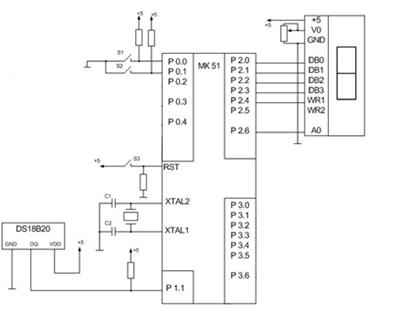
2.2 Розробка схеми електричної функціональної МПС
 Основу
пристрою, функціональна схема якого зображена у додатку Б, становить
мікроконтролер з сімейства MCS-51, Intel P8051AH розроблених фірмою Intel у 1980 році для
використання у вбудовуваних системах.
Основу
пристрою, функціональна схема якого зображена у додатку Б, становить
мікроконтролер з сімейства MCS-51, Intel P8051AH розроблених фірмою Intel у 1980 році для
використання у вбудовуваних системах.
Функціонування приладу повинне здійснюватися таким чином:
Блок живлення перетворить напругу мережі в необхідну для роботи приладу напругу.
Є датчик для виміру температури. В якості датчика температури було обрано датчик DS18B20. Вихідні сигнали датчиків - аналогові. Тому в схему включаємо аналого-цифровий перетворювач.
Мікроконтролер обробляє отриману інформацію і видає її на блок індикації тобто символьний рідкокристалічний індикатор (РКІ) WH1602A який містить кількість символів в рядку: 16, кількість рядків: 2.
2.3 Розробка
схеми електричної принципової МПС
2.3.1 Вибір пристрою відображення інформації
Рідкокристалічні індикатори. В даний час в мікропроцесорних системах для відображення інформації широко використовують рідкокристалічні індикатори (РКІ). Умовно всі РКІ можна розділити на дві категорії: символьні, або знакосинтезуючі, та графічні. Графічні індикатори являють собою матрицю з m рядків і n стовпців, на перетині яких знаходяться пікселі. У символьному ж РКІ матриця пікселів розбита на підматриці, кожна підматриця призначена для формування одного символу: цифри, букви або знака пунктуації. Як правило, для формування одного символу використовують матрицю з восьми рядків і п"яти стовпців. Символьні індикатори бувають одно-, двох- і чотирирядкові.
Семисегментний індикатор – пристрій відображення цифрової інформації. Це – найбільш проста реалізація індикатора, який може відображати арабські цифри. Для відображення букв використовуються більш складні багатосегментні і матричні індикатори. Семисегментний індикатор, як говорить його назва, складається з семи елементів індикації (сегментів). Часто семисегментні індикатори роблять в курсивному кресленні. Цифри, 6, 7 і 9 мають по два різних подання на семисегментний індикаторі. У ранніх калькуляторах Casio і Електроніка цифра 0 відображалася в нижній половині індикатора. Сегменти позначаються буквами від A до G; восьмий сегмент – десяткова точка, що має назву DP (decimal point), призначена для відображення дробових чисел. Зрідка на семисегментний індикаторі відображають літери. Сучасні семисегментні індикатори, зроблені на основі світлодіодів, виготовляють у формі сегментів, тому світлодіодні індикатори мають гранично просту, уніфіковану форму: чим менше різних світлодіодів, тим дешевше пристрій
Матричний індикатор – пристрій відображення інформації, елементи відображення якого згруповані по рядкам та стовпцям. Матричний індикатор відноситься до знакосинтезучих цифро-буквеним індикаторами і призначений для відображення інформації у вигляді букв, цифр, математичних і спеціальних знаків, знаків пунктуації, мнемонічних символів. Матричним індикатором вважається пристрій, об"єднаний в закінченому конструктиві – корпусі. На відміну від матричних моніторів, дисплеїв або екранів, матричним індикатором прийнято вважати пристрій з відносно невеликою кількістю пікселів, або пристрій, призначений для виведення одного або декількох символів, хоча межа досить розмита.
Газорозрядний екран (також широко застосовується англійська калька «плазмова панель») – пристрій відображення інформації, монітор, заснований на явищі свічення люмінофора під впливом ультрафіолетових променів, що виникають при електричному розряді в іонізованому газі, інакше кажучи в плазмі. Плазмова панель є матрицею газонаповнених осередків, укладених між двома паралельними скляними пластинами, усередині яких розташовані прозорі електроди, що утворюють шини сканування, підсвічування і адресації. Розряд в газі протікає між розрядними електродами на лицьовій стороні екрану і електродом адресації на задній стороні.
Органічний світлодіод (англ. Organic Light-Emitting Diode (OLED) – органічний светоизлучающий діод) – напівпровідниковий прилад, виготовлений з органічних сполук, який ефективно випромінює світло, якщо пропустити через нього електричний струм. Основне застосування технологія OLED знаходить при створенні пристроїв відображення інформації (дисплеїв). Передбачається, що виробництво таких дисплеїв буде набагато дешевше, ніж виробництво рідкокристалічних дисплеїв.
 З всіх
вищеперерахованих типів індикаторів, для пристрою було обрано рідкокристалічний
індикатор. Він являється найбільш оптимальним варіантом тому, що, порівняно з
іншими індикаторами його ціна порівняно не висока, також в нього невелика
споживана потужність. Простота у використанні, та його доступність, надійність
і ефективність спонукали до вибору даного індикатора.
З всіх
вищеперерахованих типів індикаторів, для пристрою було обрано рідкокристалічний
індикатор. Він являється найбільш оптимальним варіантом тому, що, порівняно з
іншими індикаторами його ціна порівняно не висока, також в нього невелика
споживана потужність. Простота у використанні, та його доступність, надійність
і ефективність спонукали до вибору даного індикатора.
Для відображення інформації, пристрою я обрав, символьний рідкокристалічний індикатор (РКІ) WH1602A. У назві WH1602A зашифровано кількість символів в рядку: 16, кількість рядків: 2. Загальний вигляд РКІ WH1602A, зображено на Рисунку 2.2.
 |
Рисунок 2.2 Загальний вигляд РКІ WH1602A
Символьний РКІ WH1602A побудований на основі контролера HD44780 компанії Hitachi. РКІ WH1602A має кілька варіантів кольору підсвітки: синій, зелений, оранжевий. Так само є триколірне підсвічування RGB. Цими трьома кольорами можна відобразити велику кількість відтінків. Останнім часом вартість WH1602A піднялася майже в два рази, тому для простих експериментальних пристроїв краще застосовувати однорядкові символьні РКІ, ціна нижче, а можливості практично такі ж. WH1602A дуже широко застосовується радіоаматорами в своїх виробах, так як в принципі це універсальний індикатор режиму роботи пристрою або процесу виконання операції пристроєм. На WH1602A доступно зробити своєрідну простеньку анімацію, що виконує наприклад роль заставки при включенні пристрою або після виконання певної операції. Тому для свого приладу я обрав саме цей РКІ.
2.3.2 Аналіз вибору мікроконтролеру
 Intel MCS-51 (i8051) — сімейство
мікроконтролерів, розроблених фірмою Intel у 1980 році для використання у
вбудовуваних системах. Дані мікроконтролери були досить популярними у 90-х
роках, згодом їх витіснили розвиненіші
аналоги фірм «Microchip Technology» і «Atmel». За рахунок вдалої реалізації
мікроконтролера (вбудований УАПП, бітовий процесор i8051) велика кількість
наявних на ринку мікроконтролерів має i8051 сумісні процесори, а за рахунок
наявності великої кількості аналогів вивчення ядра MCS-51 є одним з перших
кроків до вивчення сучасних мікропроцесорів у програмах курсів вищих навчальних
закладів.
Intel MCS-51 (i8051) — сімейство
мікроконтролерів, розроблених фірмою Intel у 1980 році для використання у
вбудовуваних системах. Дані мікроконтролери були досить популярними у 90-х
роках, згодом їх витіснили розвиненіші
аналоги фірм «Microchip Technology» і «Atmel». За рахунок вдалої реалізації
мікроконтролера (вбудований УАПП, бітовий процесор i8051) велика кількість
наявних на ринку мікроконтролерів має i8051 сумісні процесори, а за рахунок
наявності великої кількості аналогів вивчення ядра MCS-51 є одним з перших
кроків до вивчення сучасних мікропроцесорів у програмах курсів вищих навчальних
закладів.
MCS-51 прийшли на заміну випущеним у 1976 році MCS-48 і на відміну від останніх мали зменшений час виконання команд (в 2,5 — 10 раз в залежності від умов експлуатації), збільшений обсяг вбудованої пам"яті, додаткові пристрої периферії, додаткові команди для програмування. За рахунок даних покращень, мікроконтролери стали зручнішими в програмуванні, дешевші в експлуатації. Наявність булевого процесора затвердила за даними пристроями галузь автоматизації виробництва, оскільки для управління часто використовуються саме полярні сигнали — ввімкнути/вимкнути двигун, запалити/вимкнути індикатор тощо.
Конструктивно, MCS-51 є однокристальними мікроконтролерами гарвардської архітектури, що виконані по n-МОН або КМОН технології. Містять у собі 8-бітний мікропроцесор i8051 з підтримкою булевих операцій над окремими бітами, до 4096 байт вбудованої пам"яті програм (доступної тільки на читання), до 256 байт вбудованої пам"яті даних (доступної на читання і запис), підтримка адресного простору у 64 Кб для пам"яті програм і 64 Кб для пам"яті даних, два-три 16-бітні таймери/лічильники, двосторонній УАПП, 32 лінії двосторонніх портів введення-виведення, генератор тактової частоти.
Існує радянський клон мікропроцесора — МК51 (КР1816ВЕ51).

Рисунок 2.3 Мікроконтролер з сімейства MCS-51, Intel P8051AH
Надалі буде розглядатись саме оригінальна версія мікроконтролера (якщо не обговорено інше), оскільки інші ОМЕОМ принципово не відрізняються від оригінального MCS-51.
Ядро
− 8-бітовий АЛП, 8-бітові регістри
− Побітова адресація частини ОЗП
− Система команд із 111 інструкцій
− Архітектура системи команд: акумулятор
Пам"ять
− Гарвардська архітектура пам"яті
− 8-бітова шина даних
− 16-бітна шина адреси. Можливість адресації до 64 Кб пам"яті програм і до 64 Кб пам"яті даних
−
 4096 байт вбудованої пам"яті програм
(додаткові 60К досягаються за рахунок зовнішніх мікросхем пам"яті)
4096 байт вбудованої пам"яті програм
(додаткові 60К досягаються за рахунок зовнішніх мікросхем пам"яті)
− 128 байт вбудованої пам"яті даних (додаткові 64К досягаються за рахунок зовнішніх мікросхем пам"яті)
Периферія
− 32 двосторонні однобітні лінії вводу-виводу
−
 Двосторонній послідовний УАПП
Двосторонній послідовний УАПП
− Два 16-бітні таймери/лічильники
− Система з 5 переривань, з 2 рівнями пріоритетів
− Вбудований тактовий генератор
− Енергозберігаючий режим (тільки у версіях на КМОН технології)
Intel 8080 — 8-битный микропроцессор, выпущенный компанией Intel в апреле 1974 года. Представляет собой усовершенствованную версию процессора Intel 8008. По заверениям Intel, этот процессор обеспечивал десятикратный прирост производительности по сравнению с микропроцессором Intel 8008.
Новый процессор выпускался по новейшей тогда 6-микронной NMOS технологии, что позволило разместить на кристалле 4758 транзисторов. Процессор, хотя и был построен на архитектуре Intel 8008, но имел множество отличий от своего предшественника, благодаря которым и получил большую популярность. В новом процессоре по сравнению с предшественником была очень развита система команд: 16 команд передачи данных, 31 команда для их обработки, 28 команд для перехода (с прямой адресацией), 5 команд управления. В микропроцессоре Intel 8080 не было команд умножения и деления, и обычно их реализовывали с помощью подпрограмм, хотя Intel предлагала и внешний сопроцессор. Благодаря 16-разрядной адресной шине процессор позволял производить адресацию 64 Кбайт памяти, которая не разделялась на память команд и данных. Хотя процессор и был 8-разрядным и содержал семь 8-битных регистров (A, B, C, D, E, H, L), он имел ограниченные возможности обработки 16-разрядных чисел, для чего регистры объединялись в пары BC, DE, HL. В новом процессоре использовался стек во внешней памяти (в Intel 8008 он был внутренним).
 Существует небольшая путаница в
обозначениях именно этого процессора. Первоначальный вариант i8080 имел
48-выводный планарный корпус с шагом выводов 1/20 дюйма, максимальную тактовую
частоту 2 МГц и одну довольно серьёзную ошибку, которая теоретически могла
привести процессор в состояние, из которого он выводился только сигналом reset.
Улучшенный вариант 8080А, выпущенный через полгода, имел корпус DIP-40 с шагом
выводов 1/10 дюйма, максимальную тактовую частоту 2,5 МГц и эта ошибка в нём
была исправлена. Большинство авторов, используя обозначение 8080, имеют в виду
в действительности 8080А.
Существует небольшая путаница в
обозначениях именно этого процессора. Первоначальный вариант i8080 имел
48-выводный планарный корпус с шагом выводов 1/20 дюйма, максимальную тактовую
частоту 2 МГц и одну довольно серьёзную ошибку, которая теоретически могла
привести процессор в состояние, из которого он выводился только сигналом reset.
Улучшенный вариант 8080А, выпущенный через полгода, имел корпус DIP-40 с шагом
выводов 1/10 дюйма, максимальную тактовую частоту 2,5 МГц и эта ошибка в нём
была исправлена. Большинство авторов, используя обозначение 8080, имеют в виду
в действительности 8080А.
На базе микропроцессора Intel 8080 фирмой MITS был выпущен «первый в мире миникомпьютерный комплект, который может соперничать с промышленными образцами» (персональный компьютер) Altair-8800, который пользовался невероятно большой по тем временам популярностью (MITS не успевала даже вовремя обрабатывать заказы).
Помимо Altair-8800, микропроцессор Intel 8080 также применялся в устройствах управления уличным освещением и светофорами, а также в другом оборудовании.
Intel 8086 (також відомий як iAPX86) - перший 16-бітний мікропроцесор компанії Intel, що розроблявся з весни 1976 року і випущений 8 червня 1978 года. Процесор містив набір команд, який застосовується і в сучасних процесорах, саме від цього процесора бере свій початок відома на сьогодні архітектура x86.
Основними конкурентами мікропроцесора Intel 8086 Motorola 68000 були, Zilog Z8000, чіпсети F-11 і J-11 PDP-сімейства 11, MOS Technology 65C816. В деякій мірі, в області військових розробок, конкурентами були процесори-продажу MIL-STD-1750A.
Аналогами Intel 8086 мікропроцесора були такі розробки, як NEC V30, який був на 5% продуктивніше Intel 8086, але при цьому був повністю з ним сумісний. Радянським аналогом був мікропроцесор К1810ВМ86, що входив в серію мікросхем К1810.
 8-Ринок розрядних мікропроцесорів в кінці 1970-х років
був переповнений, і Intel, залишаючи спроби закріпитися на ньому, випускає свій
перший 16-бітний процесор. Процесор Intel 8086 являє собою модернізований
процесор Intel 8080, і хоча розробники не ставили перед собою мету досягти
повної сумісності на програмному рівні, більшість програм, написаних для Intel
8080, здатні виконуватися і на Intel 8086 після перекомпіляції. Новий процесор
несе в собі безліч змін, які дозволили значно (в 10 разів) збільшити
продуктивність в порівнянні з попереднім поколінням процесорів компанії.
8-Ринок розрядних мікропроцесорів в кінці 1970-х років
був переповнений, і Intel, залишаючи спроби закріпитися на ньому, випускає свій
перший 16-бітний процесор. Процесор Intel 8086 являє собою модернізований
процесор Intel 8080, і хоча розробники не ставили перед собою мету досягти
повної сумісності на програмному рівні, більшість програм, написаних для Intel
8080, здатні виконуватися і на Intel 8086 після перекомпіляції. Новий процесор
несе в собі безліч змін, які дозволили значно (в 10 разів) збільшити
продуктивність в порівнянні з попереднім поколінням процесорів компанії.
3. РОЗРОБКА ПРОГРАМНОГО ЗАБЕЗПЕЧЕННЯ
 |
3.1 Розробка схеми роботи програми
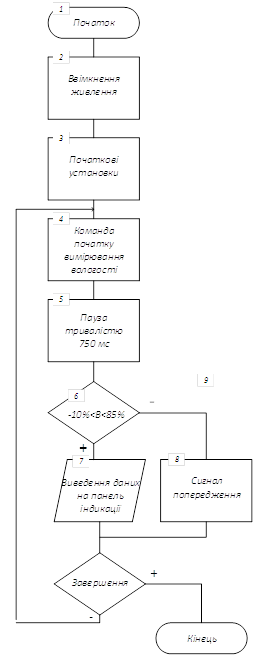
Принцип роботи мікропроцесорного пристрою для вимірювання температури можна описати наступними етапами:
1. Початок роботи.
2. Ввімкнення живлення. Схема пристрою живиться від батареї B1 +5В.
3. Встановлення початкових установок мікроконтролера. У них встановлюється покажчик стека на останню комірку ОЗП, початковий стан каналів зв"язку з датчиками температури, швидкість обміну по інтерфейсу, дозволяються переривання від таймера/лічильника, переписується кількість і індивідуальні адреси датчиків температури з EEPROM в ОЗП, в регістри записуються необхідні константи.
4. Команда початку виміру температури дозволяє перетворення значень температури в цифровий вид для датчика.
5. Аналого-цифрове перетворення значень температури займає час від 750 мс до 800 мс. Тому, щоб набути правильного значення температури, необхідно почекати паузу 750 мс (для датчика DS18B20). Пауза витримується за допомогою таймера/лічильника.
6. На цьому етапі робиться галуження програми : якщо виміряне значення температури не виходить за межі 10%<В<85%, то результат виводиться на екран. Якщо ж виміряне значення виходить за межі діапазону, то відбувається сигнал попередження.
7. Якщо необхідно продовжувати вимірювати температури, то переходять до пункту 4, якщо ні, то тоді відбувається завершення програми.
Схеми роботи програми представлена у додатку Д.
4. РОЗРОБКА МЕТРОЛОГІЧНОГО ЗАБЕЗПЕЧЕННЯ
. Розрахуємо похибку квантування АЦП за такою формулою:
 (4.1)
(4.1)
 |
де n- розрядність АЦП n=12,  - напруга АЦП, = 10(В),
- напруга АЦП, = 10(В),
Підставивши значення, отримаємо:
Розрахунок СКВ похибки квантування за такою формулою
 . (4.2)
. (4.2)
Підставивши значення, отримаємо:
 .
.
2. Розрахунок СКВ похибки кожного датчика за такою формулою:
 . (4.3)
. (4.3)
Підставивши значення, отримаємо:
 |
Розрахунок загальне СКВ похибки датчиків за такою формулою:
 . (4.4)
. (4.4)
Підставивши значення, отримаємо:

3 Розрахунок загального СКВ похибки системи за такою формулою:
 . (4.5)
. (4.5)
Підставивши значення, отримаємо:

Абсолютна похибка приладу:
5. РОЗРАХУНОК НАДІЙНОСТІ
Надійність – це властивість виробу виконувати задані функції в певних умовах експлуатації при збереженні значень основних параметрів в заданих межах.
 При розрахунку безвідмовності
технічного пристрою по раптовим відмовам визначають такі показники: ймовірність
безвідмовної роботи за заданий час
При розрахунку безвідмовності
технічного пристрою по раптовим відмовам визначають такі показники: ймовірність
безвідмовної роботи за заданий час  інтенсивність відмов
інтенсивність відмов  або
параметр потоку відмов
або
параметр потоку відмов  та напрацювання до відмови
або на відмову
та напрацювання до відмови
або на відмову  .
.
Розрахунок проводиться при таких допущеннях:
− Кожний елемент та пристрій в цілому знаходяться в одному з двох можливих станів: працездатному або непрацездатному;
− Відмови елементів є подіями випадковими і незалежними;
− Інтенсивність відмов елементів є величина постійна, тобто не залежить від часу;
− Середній час напрацювання до відмови елементів розподілений по показниковому закону.
Порядок проведення розрахунку такий:
1. На основі електричної схеми пристрою складається логічна схема надійності, на якій зображають всі елементи та зв’язки між ними;
2. Визначається кількість груп однотипних елементів, що входять в пристрій, та кількість елементів в кожній групі;
3. Визначається електричний режим роботи кожного елемента з урахуванням умов роботи пристрою;
4. Визначається критерій відмови пристрою.
Розрахунок загального параметра потоку відмов пристрою проводиться за формулою (5.1.):
 ,
(5.1.)
,
(5.1.)
де п – загальна кількість груп однотипних елементів, що входять до складу пристрою; Ni, лi – число та інтенсивність відмов елементів, і-ї групи відповідно.
Однотипні елементи з приблизно однаковими коефіцієнтами електричного навантаження допускається об’єднувати в одну групу.
Інтенсивність відмов елементів i-ї групи лi, в робочому режимі визначається за формулою (5.2.):
 , (5.2.)
, (5.2.)
де а1i – корегуючий коефіцієнт,
який враховує умови роботи (кліматичні та, механічні дії) в залежності від
призначення та умов експлуатації пристрою;  – корегуючий коефіцієнт,
який враховує електричне навантаження елементів та температуру зовнішнього
середовища; л0i – інтенсивність відмов елементів (комплектуючих виробів) в
нормальних умовах (при температурі зовнішнього середовища 25±5°С, відносній
вологості 30-70% та атмосферному тиску 618,9...795,2 мм рт. ст., без механічних
дій).
– корегуючий коефіцієнт,
який враховує електричне навантаження елементів та температуру зовнішнього
середовища; л0i – інтенсивність відмов елементів (комплектуючих виробів) в
нормальних умовах (при температурі зовнішнього середовища 25±5°С, відносній
вологості 30-70% та атмосферному тиску 618,9...795,2 мм рт. ст., без механічних
дій).
Коефіцієнт a1i визначається за формулою (5.3.):
 , (5.3.)
, (5.3.)
де Ki – коефіцієнти, призначення яких та номера таблиць їх значень, приведені в довідниках; п – кількість коефіцієнтів.
Температура у середині пристрою визначається для найгірших умов за формулою (5.4.):
 , (5.4.)
, (5.4.)
 де tоточ.макс. –
максимальна температура зовнішнього середовища; и – температура перегріву у
середині пристрою по відношенню до зовнішнього середовища.
де tоточ.макс. –
максимальна температура зовнішнього середовища; и – температура перегріву у
середині пристрою по відношенню до зовнішнього середовища.
Значення температури зовнішнього середовища для кожного варіанта завдання слід визначати згідно з варіантом його кліматичного виконання та кліматичної категорії.
При розрахунку інтенсивності відмов інтегральних мікросхем (ІМС) коефіцієнт електричного навантаження дорівнює одиниці.
По знайденому значенню параметра потоку відмов визначають ймовірність безвідмовної роботи пристрою для заданого часу t за формулою (5.5.):
 , (5.5.)
, (5.5.)
Напрацювання на відмову визначають за формулою (5.6.):
 , (5.6.)
, (5.6.)
ВИСНОВОК
 У
даній курсовій роботі був розроблений мікропроцесорний пристрій для вимірювання
температури на основі мікроконтролера INTEL 8051, що дозволяє знімати температуру
датчиком DS18В20, обробляти отриману інформацію і виводити результат вимірювань
в цифровому вигляді на екран РК індикатора.
У
даній курсовій роботі був розроблений мікропроцесорний пристрій для вимірювання
температури на основі мікроконтролера INTEL 8051, що дозволяє знімати температуру
датчиком DS18В20, обробляти отриману інформацію і виводити результат вимірювань
в цифровому вигляді на екран РК індикатора.
Головні переваги розробленої схеми:
- простота схемотехнічного рішення, невелика кількість використаних у схемі комплектуючих елементів і відсутність дефіцитних деталей;
- мікропроцесорний пристрій для вимірювання температури забезпечує високу точність і швидкість процесу вимірювання та обробки інформаційних сигналів.
В ході роботи були розроблені структурна і принципова електрична схеми, алгоритм роботи пристрою і текст програми для мікроконтролерної системи. Таким чином, розроблений мікропроцесорний пристрій для вимірювання температури є компактним, переносним пристроєм, що дає точну інформацію про температуру та дозволяє розширити можливості вимірювань.
ЛІТЕРАТУРА
1. Подлепецкий Б.И., Симаков А.Б. Микроэлектронные датчики температуры // Сбор- ник обзоров. Зарубежная электронная техника. – 1987. - №2(309). – С.64 – 97. 2.
2. Бабаян Р.Р. Преобразователи неэлектрических величин с частотным выходом // Приборы и системы управления. – 1996. - №11. – С. 24 – 26. 3.
3.
Крутоверцев С.А., Тарасова А.Е., Сорокин С.И., Зорин А.В.
Микроэлектронные датчики для контроля влажности // Электронная промышленность.
– 1991. - №5. – С. 31 – 32. 4. 
4. Стучебников В.М. Микроэлектронные датчики за рубежом // Приборы и системы управления. – 1993. - № 1. – С. 18 – 21.
5. Пат. 20134 УКРАЇНА, МКІ G 01 N 25/56. Датчик відносної вологості повітря / Ю.Г. Зав’ялов, В.І. Мартиненко, А.О. Лунін, А.П. Нагайченко (УКРАЇНА). - № 95083677; Заявлено 04.08.95; Опубл. 25.12.97, Бюл. № 6. 14.
6. Термоэлектрический датчик влажности: А.с. 1784901 СССР, МКИ G 01 N 27/12 / С.С. Варшава, З.И. Возный, В.Р. Григорова (СССР). - № 4839229/25; Заявлено 15.06.90; Опубл. 30.12.92, Бюл. № 48. 15.
7. Первичный измерительный преобразователь температуры воздуха: А.с. 1744616 СССР, МКИ G 01 N 25/56 / А.С. Клепанда, А.П. Кузнецов, А.В. Петренко, Е.К. Бы- ков, В.В. Калмыков (СССР). - № 4802828/25.
ДОДАТКИ
 |
Додаток А (обов`язковий). Схема електрична структурна МПС
 |
Додаток Б (обов`язковий). Схема електрична функціональна МПС
 |
Додаток В (обов`язковий). Схема електрична принципова МПС
 |
Додаток Г (обов`язковий). Перелік елементів
Додаток Д (обов`язковий). Схеми функціонування програм
 |
Додаток Е (обов`язковий). Лістинг програми
NAME LCD_TEMPER
DAT EQU P1
RW EQU P3.5
RS EQU P3.6
EN EQU P3.7
SER EQU P0.0
RCK EQU P1.2
OE EQU P1.6
PROGRAM SEGMENT CODE
MYDATA SEGMENT CODE
CSEG AT 0
USING 0
JMP start
RSEG PROGRAM
start:
MOV P1, #0B8h
CLR P1.6
CALL init_lcd
CALL clear_lcd
MOV DPTR, #txt
next:
CLR A
MOVC A, @A+DPTR
CJNE A, #0dh, cont
JMP $
cont:
CALL write_char
INC DPTR
JMP next
;———————————————_
wait_lcd:
SETB P1.6
still_wait:
SETB EN
CLR RS
SETB RW
MOV DAT, #0FFh
MOV C, P1.7
CLR EN
JC still_wait
CLR RW
CLR 1.6
RET
;———————————————_
init_lcd:
SETB EN
CLR RS
CLR RW
MOV A, #38h
CALL shft
CLR EN
CALL wait_lcd
SETB EN
CLR RS
CLR RW
MOV A, #0Eh
CALL shft
MOV DAT, #0Eh
CLR EN
CALL wait_lcd
SETB EN
CLR RS
CLR RW
MOV A, #06h
CALL shft
CLR EN
CALL wait_lcd
RET
;————————————_
clear_lcd:
SETB EN
CLR RS
CLR RW
MOV A, #01h
CALL shft
CLR EN
CALL wait_lcd
RET
;ініціалізація DS
INIDS1:
CALL HYL1
MOVLW 0Xcc
CALL POSIL1
MOVLW 0x44
GOTO PRIEM1
HYL1:
CALL WUX1
MOVLW .125
ADDLW -1
BTFSS STATUS,2
GOTO $-2
CALL WXO1
MOVLW .125
ADDLW -1
BTFSS STATUS,2
GOTO $-2
;зміна входу на прийом/передачу
WUX1:
BCF PORTA,DS1
BSF STATUS,5
BCF TRISA^80H,DS1
BCF STATUS,5
RETURN
WXO1:
BSF STATUS,5
BSF TRISA^80H,DS1
BCF STATUS,5
RETURN
;прийом 9 біт з DS
PRIEM1:
CALL HYL1
MOVLW 0xCC
CALL POSIL1
MOVLW 0xBE
CALL POSIL1
CALL PRIE1
BSF FLAG,1
CALL PRI1
BCF FLAG,J
BTFSS TEMP,DS1
BCF FLAG,0
BTFSC TEMP,DS1
BSF FLAG,0
BTFSS FLAG,0
GOTO CXET1
COMF LSB,0
ADDLW .1
MOVWF LSB
GOTO CXET1
PRIE1:
MOVLW .8
MOVWF COUN
CLRF LSB
PRI1:
CALL WUX1
CALL WXOl
MOVLW .2
CALL X4
MOVFW PORTA
MOVWF TEMP
BTFSC FLAG,1
RETURN
BTFSS TEMP,DS1
BCF STATUS,0
BTFSC TEMP,DS1
BSF STATUS,0
RRF LSB,1
MOVLW .15
CALL X4
DECFSZ COUN,l
GOTO PRI1
RETURN
;затримка мкс
X4:
ADDLW -1
BTFSS STATUS,2
GOTO $-2
RETURN
;посилка команди в DS
POSIL1:
MOVWF TEMP
MOVLW .8
MOVWF COUN
POSI1:
RRF TEMP,1
BTFSS STATUS,0
GOTO W01
GOTO Wl1
POS1:
DECFSZ COUN,l
GOTO POSI1
RETURN
W01:
CALL WUX1
MOVLW .15
CALL X4
CALL WXOl
GOTO POS1
W11:
CALL WUX1
CALL WXOl
MOVLW .15
CALL X4
GOTO POS1
write_char:
SETB EN
SETB RS
CLR RW
CALL shft
CLR EN
CALL wait_lcd
RET
;————————————
shft:
CLR RCK
MOV R4, #8
again:
RLC A
MOV SER, C
SETB SCK
CLR SCK
DJNZ R4, again
SETB RCK
RET
;———————————————————
RSEG MYDATA
txt: DB “LCD interface works“, 0dh
END
 (zip - application/zip)
(zip - application/zip)









