












Министерство образования и науки Российской Федерации
Национальный минерально–сырьевой университет «Горный»

Кафедра экономики, учета и аудита
КУРСОВАЯ РАБОТА
По дисциплине Автоматизация технологических процессов и производств в горном деле.
(наименование учебной дисциплины согласно учебному плану)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Тема: Автоматизация рудничного электровозного транспорта.
Автор: студент гр. АПГ-12 ________ /Амбарцумов А.А./
(шифр группы) (подпись) (Ф.И.О.)
Оценка: __________________
Дата: _____________________
Проверил: _________________
Руководитель работы: профессор _______ /Кордаков В.Н./
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2016 год
Министерство образования и науки Российской Федерации
Национальный минерально-сырьевой университет «Горный»
Кафедра автоматизации технологических процессов и производств
КУРСОВАЯ РАБОТА
По дисциплине Автоматизация технологических процессов и производств в горном деле.
( наименование учебной дисциплины согласно учебному плану)
Студенту группы АПГ-12 Амбарцумов А.А.
(шифр группы) (Ф.И.О.)
Тема работы: Автоматизация рудничного электровозного транспорта.
Срок сдачи законченного проекта: с 1.02 по 23.04 2016 года.
Руководитель работы: профессор ___________ /Кордаков В.Н./
(должность) (подпись) (Ф.И.О.)
Оглавление
1.Задачи системы автоматизации рудничного электровозного транспорта....3
2.Требования к системам автоматической блокировки и световой сигнализации рельсового транспорта………………………………………..…5
3.Устройство и принцип работы аппаратуры АБСС-1…………………...…...6
4.Устройство и принцип работы аппаратуры «НЕРПА»…………………......7
5.Автоматизированное управление рудничными аккумуляторными электровозами……………………………………………………………………..9
6.Дистанционное управление аккумуляторными электровозами………...….10
7.Заключение. 12
8.Список использованной литературы.. 13
Задачи системы автоматизации рудничного электровоза.
Транспортировка грузов по подземным шахтным выработкам может выполняться не только конвейерами, но и рельсовым транспортом с электровозной тягой. При этом системы автоматизации должны выполнять следующие задачи.
1. Обеспечивать автоматический пуск и разгон рудничного поезда без пробуксовки ведущих колес локомотива (электровоза).
2. Обеспечивать автоматическое регулирование скорости движения рудничного поезда в соответствии с профилем рельсового пути.
3. Обеспечивать автоматическое торможение рудничного поезда при подаче команды «стоп» при минимальной величине тормозного пути.
4. Обеспечивать безопасное движение рудничного поезда на опасных участках подземных рельсовых трассах.
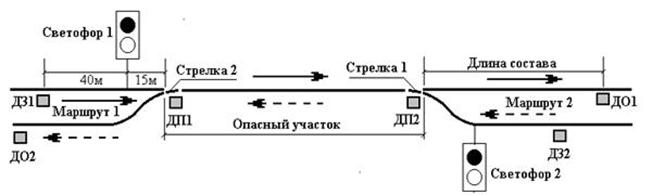
Рис.1. Схема расположения датчиков и аппаратуры автоматической блокировки и сигнализации.
Опасными участками подземных рельсовых трасс считаются такие их участки, на которых происходит встречное движение составов по одной колее. Опасные участки оборудуются светофорами и аппаратурой автоматической блокировки и сигнализации. Схема расположения датчиков и аппаратуры световой сигнализации на опасном участке подземной рельсовой трассы показана на рис. 1.
В эту схему введены следующие обозначения:
ДП – датчик положения;
ДЗ – датчик запроса;
ДО – датчик отбоя.
Опасный участок подземной рельсовой трассы, по которому наблюдается встречное движение шахтных поездов по одноколейному пути, оборудуется с обеих сторон стрелочными переводами, на каждом из которых устанавливается датчик положения ДП. Этот датчик фиксирует вход на стрелку опасного участка передней пары ходовых колес электровоза. За 15 метров от этих датчиков устанавливаются входные светофоры, которые одновременно загораются красным светом при срабатывании датчика положения ДП. Датчик запроса маршрута ДЗ устанавливается за 40 метров от входного светофора. При срабатывании этого датчика на свободном опасном участке подземной трассы переводятся все стрелки на выбранном маршруте. Датчик отбоя ДО устанавливается за выходной стрелкой выбранного маршрута на расстоянии длины рудничного поезда. Этот датчик срабатывает тогда, когда последняя вагонетка состава выйдет за пределы опасного участка. В этот момент ходовые колеса электровоза войдут в зону чувствительности этого датчика, и он сработает.
Все перечисленные датчики входят в состав аппаратуры автоматизации и световой сигнализации стрелочных переводов. Эта аппаратура должна удовлетворять определенным требованиям.
Требования к системам автоматической блокировки и световой сигнализации рельсового транспорта.
Системы автоматической блокировки и световой сигнализации рельсового транспорта должны обеспечивать:
1. Автоматическое переключение зеленого сигнала светофора на красный при срабатывании датчика положения.
2. Автоматический перевод всех стрелок на выбранном маршруте при срабатывании датчика запроса, если выбранный маршрут свободен.
3. Автоматическое переключение нормально горящего красного сигнала светофора на мигающий красный при срабатывании датчика запроса.
4. Автоматическое включение мигающего зеленого сигнала светофора, если не все стрелки переведены на выбранном маршруте.
5. Автоматическое переключение красного сигнала светофора на зеленый при срабатывании датчика отбоя.
В функции технических средств автоматизации (ТСА) электровозного транспорта входят обеспечение:
- систем СЦБ ( сигнализации ,централизации и блокировки)
- систем оперативной связи диспетчера ,машинистов , пунктов погрузки
-контроля местонахождения и направления движения поездов
- дистанционное управление стрелочными переводами с движущихся электровозов
- дистанционное управление электровозами в пунктах погрузки и разгрузки
- автоматизированное управление движением электровоза на маршруте
- автоматическое управление движением поездов(подсистема АСУ ТП).
Система сигнализации обеспечивает информацию о занятости участка пути и о положении стрелок. Нормальное состояние светофора - красный свет, при запросе занятости свободного участка на момент вода стрелок загорается мигающий зелёный , после перевода стрелки спокойно горящий зелёный . После въезда на участок - красный. Информация о получении запроса - мигающий красный (занятый участок).
Жёлтый и синий сигналы используются для сигнализации о положении стрелок.
Устройства централизации служат для управления сигналами и стрелочными переводами из центрального пункта.
Устройства блокировок выполняют контроль занятости блок-участков путей, положения стрелок и обеспечивают безопасность движения.
Все перечисленные требования реализуются в аппаратуре типа «АБСС-1» или «Нерпа».
Устройство и принцип работы аппаратуры АБСС-1.
АБСС-1М. Комплектация:
-два блока автоматического управления маршрутами (БАУМ.1)
-блок автоматического управления стрелками (БАУС.1)
-передатчики сигналов локомотивные ЛПС.1
- приёмники сигналов управления НПУ-2
- приводы стрелочные ПМС-4
-сигнальные указатели ССУ-2.
Датчики запроса ДЗ, перемены ДП, отбоя ДО - приёмные антенны НПУ. Аппаратура АБСС.1М позволяет управлять восемью маршрутами и четырьмя стрелочными переводами. При этом скорость движения электровоза не более 30 км/ час.
Аппаратура АБСС-1 автоматически управляет огнями светофоров и приводами стрелочных переводов. Структура этой аппаратуры показана на рис. 2. Эта аппаратура состоит из двух полукомплектов: передающего, который устанавливается на электровозе и приемного, который устанавливается на стрелочном переводе. Передающий полукомплект устанавливается на электровозе и через приемопередатчик включает датчики запросаДЗ. Эти же датчики могут быть включены вручную непосредственно с места их расположения в приемном полукомплекте.
Приемный полукомплект состоит из
устройства управления УУ,
к которому непосредственно подключаются все группы датчиков. Этот блок
управляет стрелками и огнями светофора в соответствии с выше изложенными
требованиями через исполнительные механизмы ИМ.
Выходные сигналы управления непосредственно воздействуют на исполнительные
устройстваИМ, которые включают или выключают приводы стрелок и
соответствующие огни светофоров. 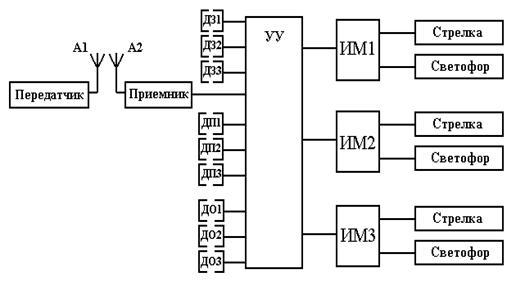
Рис.2. Структурная схема аппаратуры АБСС-1.
В сравнении с АБСС аппаратура КУВЭТ дополнительно обеспечивает ряд дополнительных возможностей. Так, обеспечивается возможность установления блокировочной зависимости с маршрутами другого узла путевого развития или других шахтных устройств, получения на диспетчерском пункте информации о состоянии аппаратуры и занятости блок-участков и т.д. Предусмотрена возможность активного участия диспетчера (дистанционно) в управлении движением на блок-участках.
Функции АБСС.1М (КУВЭТ), а также возможность автоматического контроля местонахождения и направления движения поездов осуществляет аппаратура НЭРПА.
Устройство и принцип работы аппаратуры «НЕРПА»
Аппаратура «НЕРПА» также как и аппаратура АБСС-1 автоматически управляет огнями светофоров и приводами стрелочных переводов. Кроме того, эта аппаратура предназначена для определения номера и направления движения электровоза по опасному участку. Структура этой аппаратуры показана на рис.3.
Аппаратура «НЕРПА» состоит из двух полукомплектов: передающего и приемного. Передающий полукомплект (рис. 64а) устанавливается на электровозе. В состав передающего полукомплекта входят генераторы стабильной частоты, часть из которых (1,2,3,4,5) предназначена для кодирования номера электровоза. Всего предусмотрено 25 комбинаций для кодирования таких номеров. Остальные генераторы фиксированной частоты (6,7,8,9) предназначены для управления стрелками и огнями светофоров. Для кодирования конкретного номера электровоза включается постоянно конкретная комбинация из пяти генераторов, а для выбора определенного маршрута включается один из генераторов остального набора. Фиксированные частоты включенных генераторов этого типа подаются в смеситель. Смешанная частота затем подается на усилитель низкой частоты, и направляются в модулятор, где на смешенный спектр накладываются колебания высокой несущей частоты, возбуждаемых специальным генератором ВЧ. Этот процесс называется модуляцией колебаний. Модулированные колебания вновь усиливаются и направляются в антенну А, расположенную на электровозе, которая формирует волновой электромагнитный сигнал. Этот сигнал воспринимается антеннами приемного полукомплекта.
Приемный полукомплект (рис.3) имеет две рамочные антенны А1 и А2, которые устанавливаются таким образом, чтобы сигнал с передающей антенныА электровоза последовательно достигал каждую из них при его движении.
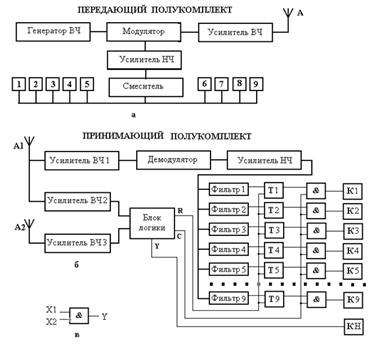
Рис.3. Структурная схема аппаратуры «НЕРПА».
Сигнал с первой приемной антенны усиливается и направляется в демодулятор, который выделяет из его спектра только низкочастотные колебания. Эти колебания усиливаются по низкой частоте и направляются в полосовые фильтры (фильтр1, фильтр2, фильтр3, и т.д.). Так как низкочастотный сигнал представляет собой смесь колебаний различной частоты, то полосовые фильтры выделяют из этой смеси только колебания той частоты, на которую они настроены. Полосовые фильтры настраиваются на частоты генераторов 1-9 передающего полукомплекта. При наличии в смешенном спектре соответствующих гармоник колебаний этих генераторов фильтры активизируют соответствующие триггеры Т1-Т9, которые в свою очередь через логические ключи И при наличии управляющего импульса включают необходимые управляющие реле К1-К9.
Сигналы с первой и второй приемной антенны одновременно подаются через усилители ВЧ1 и ВЧ2 на блок логики, который формирует сигналы управления логическими ключами И и сигналами обнуления триггеров. Кроме того, блок логики формирует сигнал Y, определяющий направление движения электровоза по опасному участку трассы.
Принцип формирования этого сигнала показан на схеме рис.3. Параметры Х1 иХ2 это сигналы поступающие на блок логики через усилители с приемных антенн А1 иА2. Так как эти сигналы не одновременно поступают на приемные антенны, то при одном направлении движения электровоза вначале сигнал поступает на антенну А1, при этом параметр Х1 становится единичным, а параметр Х2 остается нулевым. Однако на вход логического ключа И этот параметр подается в инвертированном виде поэтому в этом случае на выходе блока логики параметр Y будет единичным. При обратном движении электровоза этот параметр равен нулю. Таким образом, по величине параметра Y система различает направление движения электровоза.
Широкое использование комплексов НЭРПА сдерживается отсутствием входящих в комплект поставки или встроенных локальных средств передачи и представления собранной информации о месте нахождения электровозов. В аппаратуре НЭРПА отсутствует согласующий блок для обеспечения обмена информацией с ЭВМ подсистемы АСУТП “Локомотивный транспорот” на поверхности шахты.
Эти недостатки учтены в комплексе КРДТ, выпускаемом взамен комплекса НЭРПА.
В КРДТ используются собственные локальные системы телемеханики. Для передачи информации используется зарекомендовавший себя помехоустойчивым в шахтных условиях принцип формирования и передачи сигнала. содержащий коды номера электровоза и команды управления в виде амплитудно- модулированных сигналов высокой частоты. В зависимости от объёма требуемых функций комплекс КРДТ выпускается в трёх модификациях, причём КРДТ-3 выполняет все функции, включая передачу информации в вычислительный комплекс диспетчера.
Для сбора, формирования и передачи информации о прохождении вагонеток в четырёх точках контроля в подсистему АСУ ТП (АСТРА) применяется устройство УФИ.
Автоматизированное управлениерудничными аккумуляторными электровозами.
Автоматизированное управление рудничными аккумуляторными электровозами (АРП-14-900, АРП28-900) может выполняться с помощью тиристорной регулирующей аппаратуры ТЭРА-1.
Основные функции:
- плавный разгон и регулирование скорости
- плавное электродинамическое торможение при скорости от 0.6до2м/с
- ограничение тока тяговых двигателей в разных режимах
-включение эл. магнитных рельсовых тормозов при экстренном торможении
- измерение и индикацию скорости движения электровоза
- возможность работы с аппаратурой НЭРПА ,КРДТ;
-управление одно- и двухсекционными электровозами, а также электровозами работающими на повышенной частоте.
Для управления с пульта машиниста приводом и вспомогательным электрооборудованием контактных электровозов КТ14-900 и КТ28-900 разработана аппаратура УКТН.
В сравнении с аппаратурой ТЭРА.1 УКТН дополнительно выполняет функции:
-бесступенчатое задание и стабилизацию скорости электровоза в пределах от 0.6 до 8 м/с;
-контроль наиболее характерных неисправностей и др.
-ТСА погрузочных и разгрузочных пунктов включают следующее оборудование.
Для обработки и оперативного представления диспетчеру на поверхности шахты информации о расстановке вагонеток на порожняковой и грузовой ветвях погрузочных и разгрузочных пунктов используется аппаратура ИРП.1М
ИРП.1М (индикатор работы погрузочного пункта шахты) может использоваться в составе АСУТП (подсистема АСТРА). Индикатор работает совместно с аппаратурой счёта вагонеток УФИ и отображает в удобной для восприятия форме количество вагонеток, загруженных с начала смены.
Автоматизированные комплексы погрузочных пунктов КАП служат для контроля заполнения шахтных вагонеток, передвижения поезда гидротолкателем и управления средствами загрузки.
Для механизации и автоматизации обмена вагонеток в клети применяют агрегаты АЦ и АЦМ ( с электрическим ) и АПГ ( с пневмогидравлическим приводом).
В составе перечисленного выше автоматизированного оборудования применяются различные датчики контроля заполнения вагонеток, датчики контроля положения подвижных объектов ( в том числе концевой защиты их) -ДКПУ,УКП , ДПМГ и другие. Они обеспечивают искро-взрывобезопасный контроль оборудования, высокую надёжность и длительный срок службы.
Дистанционное управление аккумуляторнымиэлектровозами.
Для дистанционного управления аккумуляторными электровозами используется система СТАРТ- 1. С её помощью обеспечивается двусторонний обмен информацией между электровозными и путевыми приёмопередатчиками. Для передачи на электровоз на частоте 72 кГц используют 4 модулированных по амплитуде сигнала, для передачи с электровоза на частоте 150 кГц- два модулированных по амплитуде сигнала.
В аппаратуре СТАРТ-1 выполняются функции рассмотренных выше аппаратов. Она может входить в состав подсистемы АСУТП шахты.
Канатная откатка относится к разновидности рельсового транспорта и применяется в выработках с углом наклона более 6 градусов для обеспечения обратного движения вагонов под действием собственного веса. Профиль пути выработки имеет переменный угол. В связи с этим задачей автоматизации является контроль и регулирование скорости в соответствии с рациональными нагрузками на электродвигатель лебёдки. Нагрузка на двигатель может меняться от 20 до 130% номинальной. Во время основного рабочего цикла задаются максимальная 3-5 м/ с и малая 0.5 м/с (при вытягивании вагонеток с приёмного горизонта, при прохождении закруглений).
Список литературы
1.Мирской М.И. Рудничная Автоматика. М., Недра, 1992
2.Гаврилов П.Д., Толпежников Л.Я., Медведев А.Е.. Автоматизация производственных процессов. М., Недра, 1985
3.Пухов ю.С. Москва, Недра 1991
4.Волотковский с.а., Рудничная электровозная тяга. М., Недра, 1981
 (zip - application/zip)
(zip - application/zip)









