












ВВЕДЕНИЕ
Выполнение курсового проекта ставит задачу усвоения студентами общих методов исследования механизмов и их практического применения. В ходе выполнения проекта необходимо провести структурный, кинематический и силовой анализ рычажного механизма, а именно: определить структурные характеристики механизма, линейные размеры звеньев, построить кинематическую схему механизма в заданном положении, определить в заданном положении скорости и ускорения ключевых точек, принадлежащих звеньям механизма, а также определить все силы, действующие на механизм и уравновешивающую силу.
1. СТРУКТУРНЫЙ АНАЛИЗ ПЛОСКО-РЫЧАЖНОГО МЕХАНИЗМА
1.1. Структурный анализ
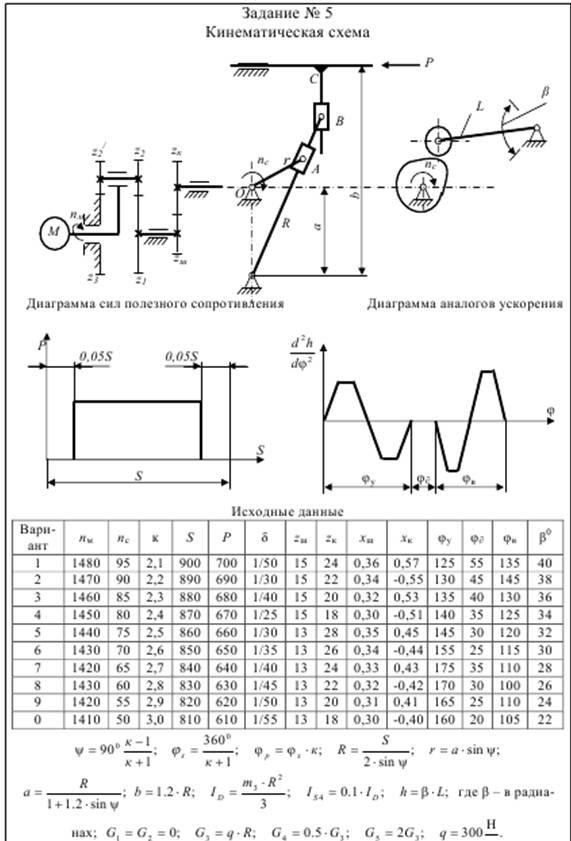
На рисунке 1. изображен кривошипно-рычажный механизм. Ведущее звено 1 (кривошип) обозначено круглой стрелкой.
Данный механизм состоит из стойки О – Д; кривошипа 1; коромысла 3; ползунов 2, 4; и кулисы 5. При структурном анализе мы определяем баланс связей и подвижностей путем определения двух структурных характеристик:
1) степень аномальности структуры
S=3n – 2(Р5+ Р4+ Р3) – Р2 – Р1 – Р0 ;
2) степень иррациональности
s=3n – 3Р5 – 2Р4 – Р3 – Р2,
где n – число подвижных звеньев механизма;
Р5 – число кинематических пар 5-го класса;
Р4 – число кинематических пар 4-го класса;
Р3 – число кинематических пар 3-го класса;
Р2 – число кинематических пар 2-го класса;
Р1 – число кинематических пар 1-го класса;
Р0 – число входных звеньев.
Из рисунка 1 находим: n=5. В рассматриваемом кривошипно-рычажном механизме звенья образуют только двухсторонние пары:
Из рисунка 1 находим: n=5. В рассматриваемом кривошипно-рычажном механизме звенья образуют только двухсторонние пары:
вращательные О (0; 1); Д (0; 3);
поступательные А (0;2); В (0; 4); С (0; 5).
Таким образом: Р5=7; Р4=3; Р3=0; Р2=0; Р1=0; Р0=1.
Тогда: S=3·5 – 2·(4+3) – 1=15 – 14 – 1=0; т.е. структура нормальна;
s=3·5 – 3·7=15 – 21= –6, что означает 6 избыточных связей.
1.2. Структурный синтез
С целью уменьшения количества контурных избыточных связей, заменяем все поступательные пары на цилиндрические. Тогда:
s=3·5 – 3·4 – 2·3=15 – 12 – 6=–3, что означает 3 избыточных связи.
 |
2.КИНЕМАТИЧЕСКИЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА
2.1Определение размеров механизма.
Для определения размеров звеньев воспользуемся зависимостью угла размаха кулисы BD (углового хода) от коэффициента изменения скорости хода k механизма, который характеризует отношение рабочего хода к холостому:
 ;
;
Угол холостого хода  ;
;
Угол рабочего хода  ;
;
Длина плеча коромысла ВД  м
м
Длина стойки ОД  м
м
Высота стойки  м
м
Длина кривошипа ОА  м
м
2.2. План положения механизма.
Назначаем масштаб длин: µl =r/ОА=0686/50=0,013м/мм.
Таблица 1.1. Значения длин звеньев в масштабе µl мм
|
ОА=r/µl |
17 |
|
ОД=а/µl |
24 |
|
ДВ=R/µl |
53 |
|
СД=b/µl |
26 |
2.3. Построение плана скоростей
Определяем скорости для 1-го положения:
 с –1;
с –1;
Скорость точки А: VА1=ωr= м/с;
м/с;
Масштаб скоростей: µV= м∙с/мм;
м∙с/мм;
Длина отрезка Рb на плане скоростей:
 ;
;
Таблица 1.2. Числовые значения линейных скоростей для 8 положений механизма
|
ОБОЗНАЧЕНИЕ |
ПОЛОЖЕНИЕ МЕХАНИЗМА |
|||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
|
VA1.2 |
1.1506 |
1.1506 |
1.1506 |
1.1506 |
1.1506 |
1.1506 |
1.1506 |
1.1506 |
|
VА3 |
0.874 |
0.874 |
0.92 |
0 |
1.14 |
0.805 |
0.805 |
0 |
|
VS3 |
0.874 |
0.874 |
0.572 |
0 |
0.52 |
7.0 |
7.0 |
0 |
|
VB3.4 |
1.21 |
1.31 |
1.15 |
0 |
1.6 |
14.5 |
14.0 |
0 |
|
V A3A2 |
1.28 |
0 |
1.84 |
0 |
2.61 |
0 |
0.70 |
0 |
|
VB5 B3.4 |
1.15 |
0 |
1.59 |
0 |
0.87 |
0 |
0.70 |
0 |
|
VС |
1.41 |
2.8 |
1.15 |
0 |
3.70 |
1.41 |
1.1 |
0 |
VB=Pb∙µV; VC=PC∙µV; VA3=Pa3∙µV; VS4=VB; VBC=bc∙µV; VA3A2=a2a3∙µV; VS5= VC; VS3= VВ/2.
Таблица 2.3. Числовые значения угловых скоростей
|
ОБОЗНАЧЕНИЕ |
ПОЛОЖЕНИЕ МЕХАНИЗМА |
|||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
|
ω1 |
5.23 |
5.23 |
5.23 |
5.23 |
5.23 |
5.23 |
5.23 |
5.23 |
|
ω2= ω3 |
3.53 |
3.53 |
3.57 |
0 |
4.6 |
3.53 |
3.53 |
0 |
ω2= ω3= VA3A2/lAД ∙µl,.
2.4. Построение плана ускорений для заданного положения механизма, соответствующее варианту
Определение ускорения точки А:
 , т.к. ω1=const, то
, т.к. ω1=const, то  // АО
// АО
Определение нормальной составляющей ускорения точки А:
 =5.232∙0,22=6.02м/с2
=5.232∙0,22=6.02м/с2
Масштаб ускорений µV=аА/Па1=6.02/50=0.1204м∙с–2/мм.
Определение ускорения точки А3:
 или
или  ;
;
Определение нормальной составляющей ускорения точки А3:
 3.752∙0.013=1.19
м/с2
3.752∙0.013=1.19
м/с2
Определение кориолисовой составляющей ускорения точки А3 относительно А2:
 =2·3.75·1,84=13,8
м/с2
=2·3.75·1,84=13,8
м/с2
Ускорение точки В определяем из соотношения:
 мм;
мм;
аВ=Пb∙µа=20·0,42=8,4м/с;
 м/с2;
м/с2;
Определение тангенциальной составляющей ускорения точки В:
 м/с2;
м/с2;
Ускорение точки В3 сонаправлено с вектором ускорения pa3 ввиду принадлежности точки А3 и В3 одному звену ВD и определяется из подобия:
 мм
мм
 мм
мм
1.3Истинные значения ускорения механизма в заданном положении
|
а А1.2=6.02 м/c |
as 3=15.2*0.1204=1.83 м/c |
|
а А3=50*0.1204=6.02 м/c |
а В3.4с=9.0*0.1204=1.8 м/c |
|
ас=32*0.1204=3.85 м/c |
а А3 с =29*0.1204=3.49 м/c |
|
а В3.4=37*1204=4.45 м/c |
ὲ3=3.49/0/27=12/92 м/c |
3.СИЛОВОЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА
Целью силового анализа является определение уравновешивающей силы и уравновешивающего момента, приложенных к выходному звену, а также реакций в кинематических прах.
Силы инерции звеньев 4 и 5 определяются по формулам;
m4=G4/g= 102.9/9.8=10.5 кг
m5=G5/g=411.6/9.8=42кг
G3= q/LBD= 300*0.686=205.8 H
G4= 0.5*G3= 0.5*205.8=102.4 H
G5=2*G3=2*205.8=411.6 H
Fu4=m4*a B3.4c=10.5*1.8=18.9 H
Fu5=m5*a c=42*3.85=161.7 H
Fu3=m3*as3=
 * as3=
* as3=  *1.83=38.43 H
*1.83=38.43 H
m= =
= =0.686
=0.686
Mu3=Js3* ὲ3=0.13*12.93=1.67 H*м
ID=
3.1Определение сил и моментов сил, действующих на механизм.
На втором этапе силового анализа определим уравновешивающию силу Fур, Н которая приложена к точке А перпендикулярно крипошипу 1 механизма в заданном положении.
µiv=
Fур= =101.7 H
=101.7 H
Мур= Fур*LOA=101.7*0.22=22 H*м
3.2 определение кинематических пар
На третьем этапе силового анализа находим неизвестные реакции в кинематических парах механизма. Для этого воспользуемся методом продольных реакций и построим в установленном масштабе замкнутый векторный контур сил или план сил для заданного положения механизма.
Для удобства построений принимаем fmax=50 мм, а масштабный коффициент МF равен:
МF=Fmax/fmax МF=660/50=13.2 H/мм
Для построения плана сил необходимо определить длины векторов, отображающих на плане все действующие на механизм силы:
g3=G3/ МF=205.8/13.2=15мм
g4=G4/ МF =102.9/13.2=7 мм
g5=G5/ МF=411.6/13.2=31.2мм
fu4=Fu4/µF=18.9/13.2=1.4мм
fu5=Fu5/µF=161.7/13.2=12.20мм
fu3=Fu3/µF=38.13/13.2=2.9мм
fур=Fур/ µF=101.7/13.2=7.7мм
Истинное значение реакции в шарнире А1 определяется умножением длины вектора r A1 на масштабный коэффициент плана сил;
RA1= r1* µF RA2, RA1= 253*13.2=333.96 H
RA2= fур2* µF, RA2=173*132=227.04 H
RB4= Fc-Fu5=660-161.7=498.3 H
RB= Rb* µF= 60.3* 13.2=795.96 H
4.СИНТЕЗ КУЛАЧКОГО МЕХАНИЗМА.
4.1 Построение графика движения плоского толкателя кулачкового механихма
Для построения графиков движения толкателя кулачкового механизма выполним следующее.
Переведем значения заданных фазовых углов в радианную меру, используя при этом формулу
ᵠрад=ᵠгр*
Где ᵠгр- фазовый угол в градусной мере (по заданию)
ᵠу=150* =2.61
=2.61
Угол верхнего выстоя равен:
ᵠд=20*=0.34
Угол опускания равен:
ᵠв=110*= 1.92
Определим величину рабочего угла ᵠр, рад по формуле:
ᵠр=ᵠу+ᵠд+ᵠв= 2.61+0.34+1.92=4.86
µᵠ=ᵠр/xp=4.88/120=0.040 рад/мм
далее определим величины отрезков, изображающих соответствующие фазовые углы в установленном масштабе:
xу=ᵠу/ µᵠ=2.61/0.040=64мм
xд=ᵠд/ µᵠ=0.34/0.040=9мм
xв=ᵠв/ µᵠ=1.92/0.040=47мм
С учетом масштабного коэффициента имеем:
Ha= Hv=Hs=1/Hф= 1/0.040=25 мм
Список используемой литературы
1. Теория механизмов и машин: Учеб. для втузов/ К. В. Фролов, С. А. Попов, А. К. Мусатов и др.; Под ред. К. В. Фролова. – М.: Высш. шк., 1987. – 496 с.: ил.
2. Попов С. А. Курсовое проектирование по теории механизмов и механике машин: Учеб. пособие для машиностроит. спец. вузов/ Под ред. К. В. Фролова. – М.: высш. шк. 1986. – 295 с.: ил.
 (zip - application/zip)
(zip - application/zip)









