












МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ДОНБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра АУТПТЭК
КУРСОВАЯ РАБОТА
МОДЕЛИРОВАНИЕ ДИНАМИЧЕСКИХ СИСТЕМ В SIMULINK
По курсу “Компьютерная графика”
Алчевск, 2007
Содержание
Введение
1 Моделирование входных сигналов (моделирование объекта А)
1.1 Общие принципы представления сигналов математическими моделями
1.2 Моделирование сигнала заданного вида
2 Моделирование объекта Б
3 Моделирование объекта В
4 Моделирование системы
5 Анализ результатов моделирования
Выводы
Перечень ссылок
Введение
Моделирование различных систем, объектов, процессов, явлений природы и т.д. имеет важное значение в науке и технике. Благодаря моделированию существенно облегчается и удешевляется исследование физических, химических и других природных явлений, технических объектов, создание образцов новой техники. Моделированием называется создание моделей реальных объектов и их экспериментальные исследования. В свою очередь модель – это, как правило, упрощенное отражение реального объекта, несущее те его качества, которые подвергаются исследованию (моделированию).
Большое значение имеют, так же, математические модели. Они позволяют производить моделирование реальных объектов и систем с использованием многочисленных математических методов, оперируя со свойствами объектов, выраженными в виде различных математических зависимостей и соотношений. Математические модели той или иной степени сложности, как правило, идеализированы и отражают только исследуемые характеристики реальных объектов.
С математическими моделями тесно связаны компьютерные модели, которые в зависимости от программы в которой производится моделирование, используют те или иные математические характеристики реальных объектов. В настоящее время в связи со значительным прогрессом в области компьютерной техники компьютерное моделирование приобрело большое значение в науке и технике. На сегодняшний день существует значительное количество специализированных пакетов, таких как MatLab, MathCad, Math, Mathematica, Maple и др., которые дают широкие возможности для компьютерного моделирования различных процессов и систем.
Целью данной курсовой работы является изучение принципов решения различных технических задач с использованием компьютерной техники и приобретение практических навыков моделирования процессов и объектов.
В результате выполнения курсовой работы необходимо изучить принципы построения моделей в программе Simulink, освоить методику моделирования в ней и расширить знания и навыки при решении математических задач (к которым сводится большинство практических задач науки и техники) в пакете MatLab в целом. Необходимо, также, научиться строить графические зависимости различных функций, работать с табличными данными, конвертировать таблицы и графики в текстовый редактор Word и оформлять текстовые документы, включающие в себя формулы, таблицы, графические объекты.
1. Моделирование входного сигнала
1.1 Общие принципы представления сигналов математическими моделями
Входной сигнал может задаваться различными математическими моделями: динамическим представлением, геометрическим, спектральным, энергетическим. Динамическое представление произвольного сигнала с использованием функции Хевисайда:

(1.1)
При геометрическом представлении вводится понятие координатного базиса: если совокупность векторов (e1, e2, еЗ,...) является линейно независимой, то она образует координатный базис в линейном пространстве. Тогда сигнал s(t) можно представить в виде
![]()
(1.2)
где числа (c1, c2, сЗ,...) являются проекциями сигнала s(t) относительно выбранного базиса.
При спектральном представлении сигнал s(t) и его спектральная плотность S(ω) взаимно-однозначно связаны прямым и обратным преобразованиями Фурье:

(1.3)

(1.4)
1.2 Моделирование сигнала заданного вида
Необходимо промоделировать сигнал, представляющий собой
произведение двух функций: X=X4*X16; X(t)=X4*X16
Сигнал X4 задан функцией вида:
![]() (1.5)
(1.5)
где A = 40, T=4ms, ![]()
Для перехода к циклической частота воспользуемся формулой:
![]() ;
; ![]() ; (1.6)
; (1.6)
![]() рад/с
рад/с
Сигнал X16 задан функцией вида:
![]() (1.7)
(1.7)
где A = 75, T=17ms, ![]()
Для перехода к циклической частоте воспользуемся формулой (1.6):
![]() ;
;
![]() рад/с
рад/с
После преобразований составим
структурную схему в Simulink для моделирования заданных сигналов, а так же для моделирования
результирующего сигнала. Она приведена на рисунке 1.1.

Рисунок 1.1– Структурная схема для моделирования сигнала 1, 2 и результирующего сигнала
|
|
|
Объект Б задан дифференциальным уравнением:
2.88y///+ 5.76 y// + 5.76 y/ +2.88y = 9.23x (2.1)
Преобразуем дифференциальное уравнение (2.1) к машинному виду
2.88p3y(p) + 5.76 p2y(p) + 5.76 py(p) +2.88y(p) = 9.23x(p) (2.2)
y(p)(2.88p3 + 5.76 p2 + 5.76 p +2.88) = 9.23x(p) (2.3)
Так как правая часть уравнения (2.1) не содержит производной от входного сигнала, решим его общим методом. Запишем его в форме Коши:
 ; (2.4)
; (2.4)
 (2.5)
(2.5)
Полученное уравнение позволяет осуществить построение двух структурных схем для моделирования объекта, заданного уравнением (2.1). Структурные схемы приведены на рисунке 2.1 и 2.2

Рисунок 2.1 – Структурная схема модели объекта Б (с использованием блока Transfer Fcn)

Рисунок 2.2 – Структурная схема модели объекта Б (с использованием блоков Integrator)
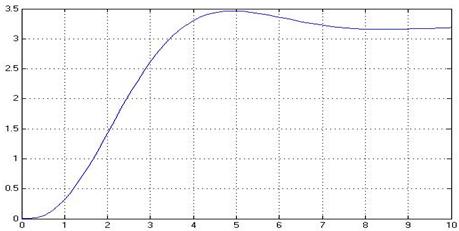
Для оценки параметров объекта Б строится переходная характеристика, которая является реакцией исследуемой системы на функцию включения (функцию Хевисайда). Графики переходных характеристик приведены на рисунках 2.3 и 2.4 (с использованием блоков Transfer Fcn и Integrator соответственно)
|
|
Рисунок 2.3 – График структурной схемы модели объекта Б (с использованием блока Transfer Fcn)
|
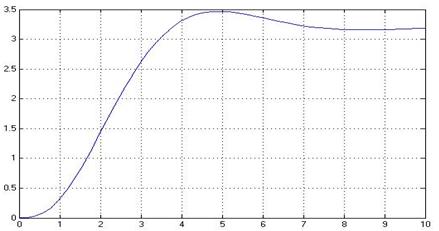
Рисунок 2.4 – График структурной схемы модели объекта Б (с использованием блоков Integrator)
Как и следовало ожидать график, построенный с помощью блока Transfer Fcn и график, построенный с помощью блоков Integrator идентичны.
3 Моделирование объекта В
Объект В задан структурной схемой представленной на рисунке 3.1:
![]() Х(Р)
Х(Р)![]()
![]()
|
|
Рисунок 3.1 – Структурная схема объекта В
W1э = W4*W10 (3.1)
W1э = W4(p)*W10(p);
![]()
![]() (3.2)
(3.2)
Элементы схемы соединены последовательно:
W4 + W10 = ![]() *
* ![]() (3.3)
(3.3)
Параметры объекта:
T1 = 0.1c; T2 = 1.1;T3 = 0.9c.
Для оценки параметров объекта В строится переходная характеристика, которая является реакцией исследуемой системы на функцию включения (функцию Хевисайда). Структурная схема модели объекта В приведена на рисунке 3.2 а его график переходной характеристики приведен на рисунке 3.3.

Рисунок 3.2 – Структурная схема модели объекта В
|
|
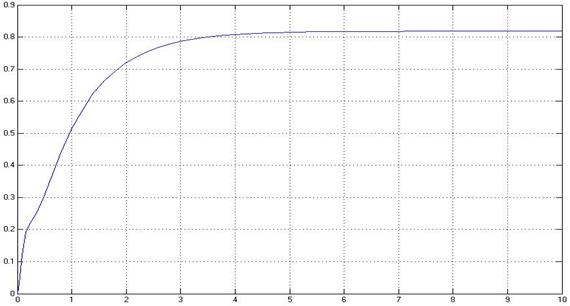
Рисунок 3.3 – График структурной схемы модели объекта В
4. Моделирование системы
Структурная схема системы, приведенная на рисунке 4.1, представляет собой последовательное соединение, состоящее из смоделированных ранее структур объекта Б (с использованием блока Transfer Fcn) и объекта В. Она приведена на рисунке 4.1.

Рисунок 4.1 – Схема общей структуры системы
В соответствии со структурной схемой сигнал подается на объект Б и объект В. Реакцией синтезируемой системы на единичный скачок будет являться переходный процесс, график которого представлен на рисунке 4.2.
![]()
|
|
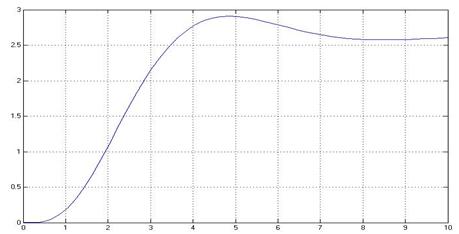
Рисунок 4.2 – График структурной схемы модели объекта В
5. Анализ результатов моделирования
В процессе моделирования заданных сигналов X15 и X3 разработана структурная схема (рисунок 1.1) и получены функции, представленные на рисунках 1.2. 1.3. 1.4..
Объект Б задан дифференциальным уравнением (2.1) и имеет третий порядок. Для оценки параметров объекта Б строится переходная характеристика, которая является откликом исследуемой системы на функцию включения (функцию Хевисайда). График переходной характеристики приведен на рисунке 2.3 и 2.4. Она имеет колебательный характер.
Объект В задан суммой передаточных функций (3.3) первого порядка. Для оценки параметров объекта В строится переходная характеристика, которая является откликом исследуемой системы на функцию включения (функцию Хевисайда). График переходной характеристики приведен на рисунке 3.3. Она имеет апериодический характер.
Функция, приведенная на рисунке 4.1 является системой смоделированных ранее структуры объекта Б (с использованием блока Transfer Fcn) и объекта В. Откликом системы на данное воздействие является функция, график которой приведен на рисунке 4.2.
Выводы
В результате выполнения курсовой работы были получены следующие результаты.
Смоделированы сигналы X15, X3 а так же X15 + X3 графики которых приведены на рисунках 1.2, 1.3 и 1.4 соответственно.
Построена структурная схема объекта Б заданного дифференциальным уравнением (рис. 2.1). Произведено ее моделирование и получена переходная характеристика (рис. 2.3 и 2.4).
Объект Б был задан суммой передаточных функций (3.1). Переходная характеристика объекта Б показана на рис. 3.1.
В процессе работы над курсовым проектом я узнал много нового и интересного. Были закреплены знания и навыки, полученные в курсах КГ, КТ и ОВР.
Полученные знания и навыки будут использоваться мною в дальнейшем при изучении других дисциплин, написании курсовых проектов и дипломной работы, а также в моей будущей инженерной и научной деятельности.
Перечень ссылок
1. И.В.Черных. Simulink: Инструмент моделирования динамических систем. – M.:Exponenta. 2000
2. Потемкин В.Г. Система инженерных и научных расчетов MATLAB 5.x: в 2-х томах. Том 1. - М.: ДИАЛОГ МИФИ. 1999. – 366 с.
3. Гультяев А.К. MATLAB 5.2. Имитационное моделирование в среде Windows: Практическое пособие. - СПб.: КОРОНА принт, 1999. – 288 с.
4. Теория систем автоматического регулирования, издание третье, исправленное. Бесекерский В.А., Попов Е.П. М.: Наука. 1975, 768 с.
5. Воронов А.А. Основы теории автоматического регулирования. Часть 1. М–Л: Энергия. 1965. 396 с.
6. Луценко В.А.. Финякин Л.Н. Математическое моделирование химико-технологических процессов на АВМ. – М.: Химия. 1978.
7. Горбацевич Е.Д. Левинзон Ф.Ф. Аналоговое моделирование систем управления. – М.: Наука. Главная редакция физико – математической литературы. 1984. – 304 с.
8. Левин В.И., Гросберг Ю.И. Дифференциальные уравнения математической физики. – М.: Гостехиздат. 1951.
9. Гельман В.Я. Практикум по математике на компьютере. СПб: СПИГ. 2001.
10. Мякинный О.A. Mikrosoft Word 2003: Самоучитель / О.А. Мякинный. - М: Диалектика. 2004. - 272 с.
 (zip - application/zip)
(zip - application/zip)









